
一种井下多传感器的融合定位系统.pdf

猫巷****雪凝


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种井下多传感器的融合定位系统.pdf
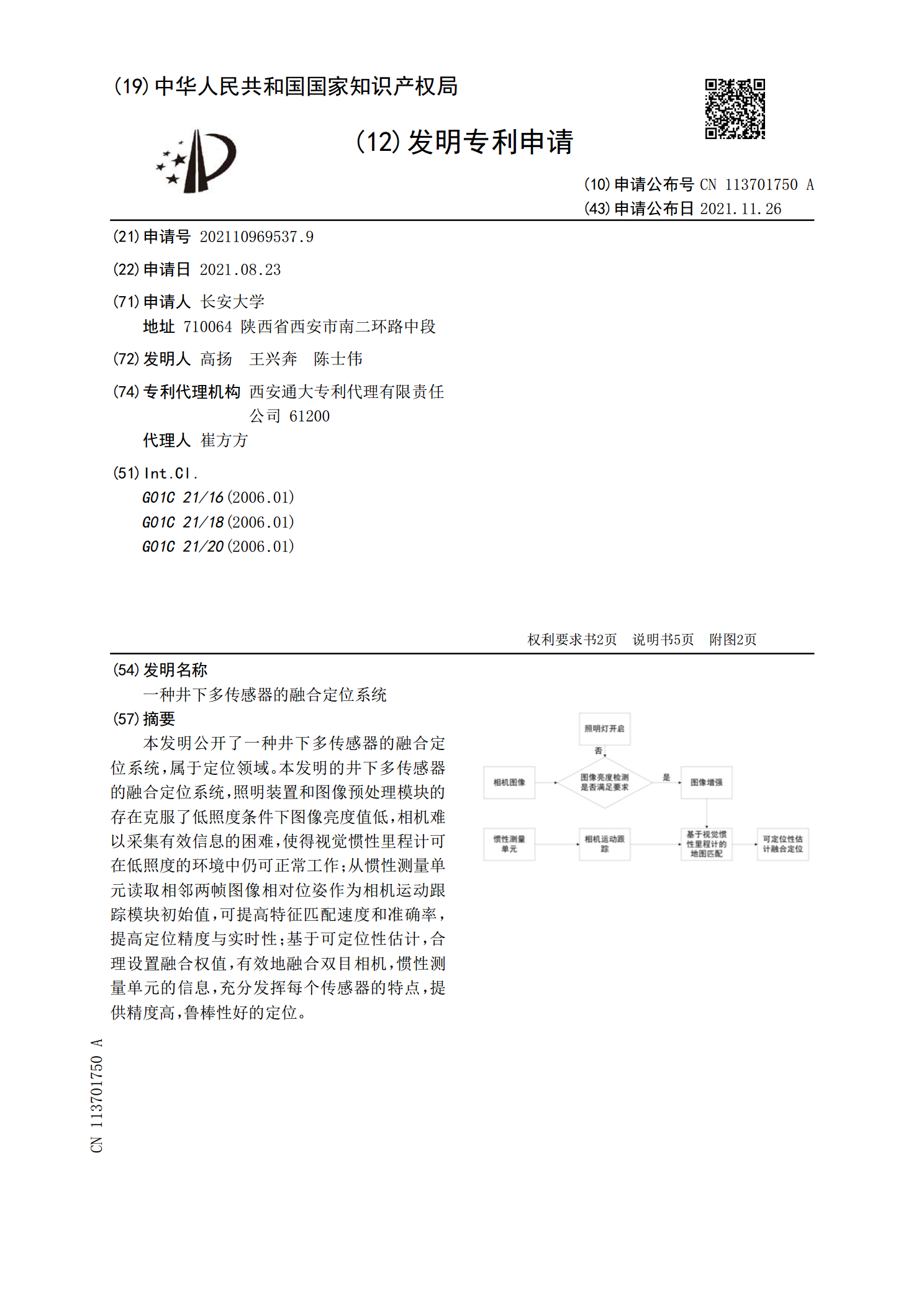
本发明公开了一种井下多传感器的融合定位系统,属于定位领域。本发明的井下多传感器的融合定位系统,照明装置和图像预处理模块的存在克服了低照度条件下图像亮度值低,相机难以采集有效信息的困难,使得视觉惯性里程计可在低照度的环境中仍可正常工作;从惯性测量单元读取相邻两帧图像相对位姿作为相机运动跟踪模块初始值,可提高特征匹配速度和准确率,提高定位精度与实时性;基于可定位性估计,合理设置融合权值,有效地融合双目相机,惯性测量单元的信息,充分发挥每个传感器的特点,提供精度高,鲁棒性好的定位。

一种基于多传感器数据融合的定位系统及定位方法.pdf
本发明公开了一种基于多传感器数据融合的定位系统及定位方法,通过在码盘架上固定编码器和全向轮,全向轮的主转动轴与编码器转轴连接,固定支架上固定有三个码盘架,三个码盘架上的三个编码器转轴轴线所在竖直平面之间的夹角均为120°,三个全向轮同时接触运动地面;采用三码盘全场定位系统,当移动机器人运动时,三个全向轮被动旋转,能够准确获取机器人运动全方位移动数据,从而减小因陀螺仪的角度漂移而导致定位不准的影响,通过三个码盘坐标的更新公式获取待定位机器人在三个自由度的变化情况,实现相对定位,提高了机器人在高速行驶以及不同
一种港口多传感器融合高精度定位系统.pdf
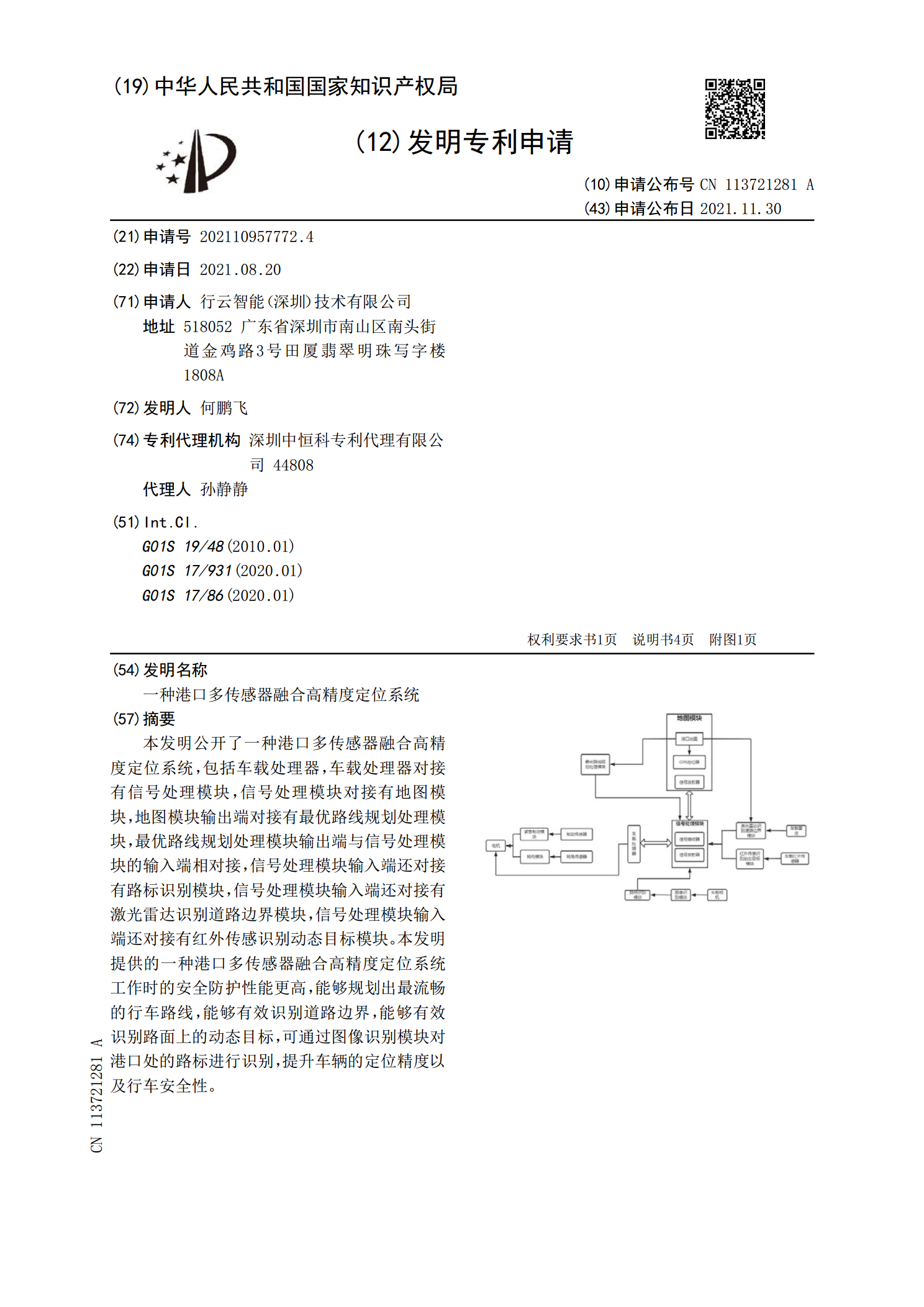
本发明公开了一种港口多传感器融合高精度定位系统,包括车载处理器,车载处理器对接有信号处理模块,信号处理模块对接有地图模块,地图模块输出端对接有最优路线规划处理模块,最优路线规划处理模块输出端与信号处理模块的输入端相对接,信号处理模块输入端还对接有路标识别模块,信号处理模块输入端还对接有激光雷达识别道路边界模块,信号处理模块输入端还对接有红外传感识别动态目标模块。本发明提供的一种港口多传感器融合高精度定位系统工作时的安全防护性能更高,能够规划出最流畅的行车路线,能够有效识别道路边界,能够有效识别路面上的动态

基于多传感器融合的定位系统设计与实现.docx
基于多传感器融合的定位系统设计与实现导言随着信息化时代的发展,无线定位技术逐渐被广泛关注。它包括了基于无线传感器网络的室内位置服务、基于全球卫星导航系统(GPS)的车辆定位、人员定位等。由于传感器自身特性、目标环境和实际应用需求等因素的影响,单一传感器无法克服其固有的不足之处,融合多个传感器得以弥补单个传感器的缺点,实现高精度、稳健、鲁棒的定位。本文旨在介绍一种基于多传感器融合的定位系统设计与实现。论文从组成部分、工作原理、实现方法和性能评估四个方面展开讨论。一、组成部分本文设计和实现的基于多传感器融合的

一种基于多源融合的井下人员定位系统及方法.pdf
本发明公开了一种基于多源融合的井下人员定位系统及方法,包括地面监控中心、上层终端、通信主干网、网关节点、总线、定位锚节点、位置信标和移动节点,针对煤矿井下人员定位技术精度低、定位盲区多,实现全覆盖成本高等问题,本发明采用电磁波一维粗定位与惯导高精度定位相结合的方法,根据需要,不需要高精度定位的区域使用电磁波粗定位,以节省移动节点的电量消耗,需要高精度定位区域,使用惯性导航高精度定位,上位机软件可以发送定位切换命令给指定的移动节点,需要了解其精确的位置和行走轨迹时,将惯导定位数据传输给定位锚节点,以减小定位