
一种平面确定方法、装置、设备和存储介质.pdf

书生****35

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种平面确定方法、装置、设备和存储介质.pdf
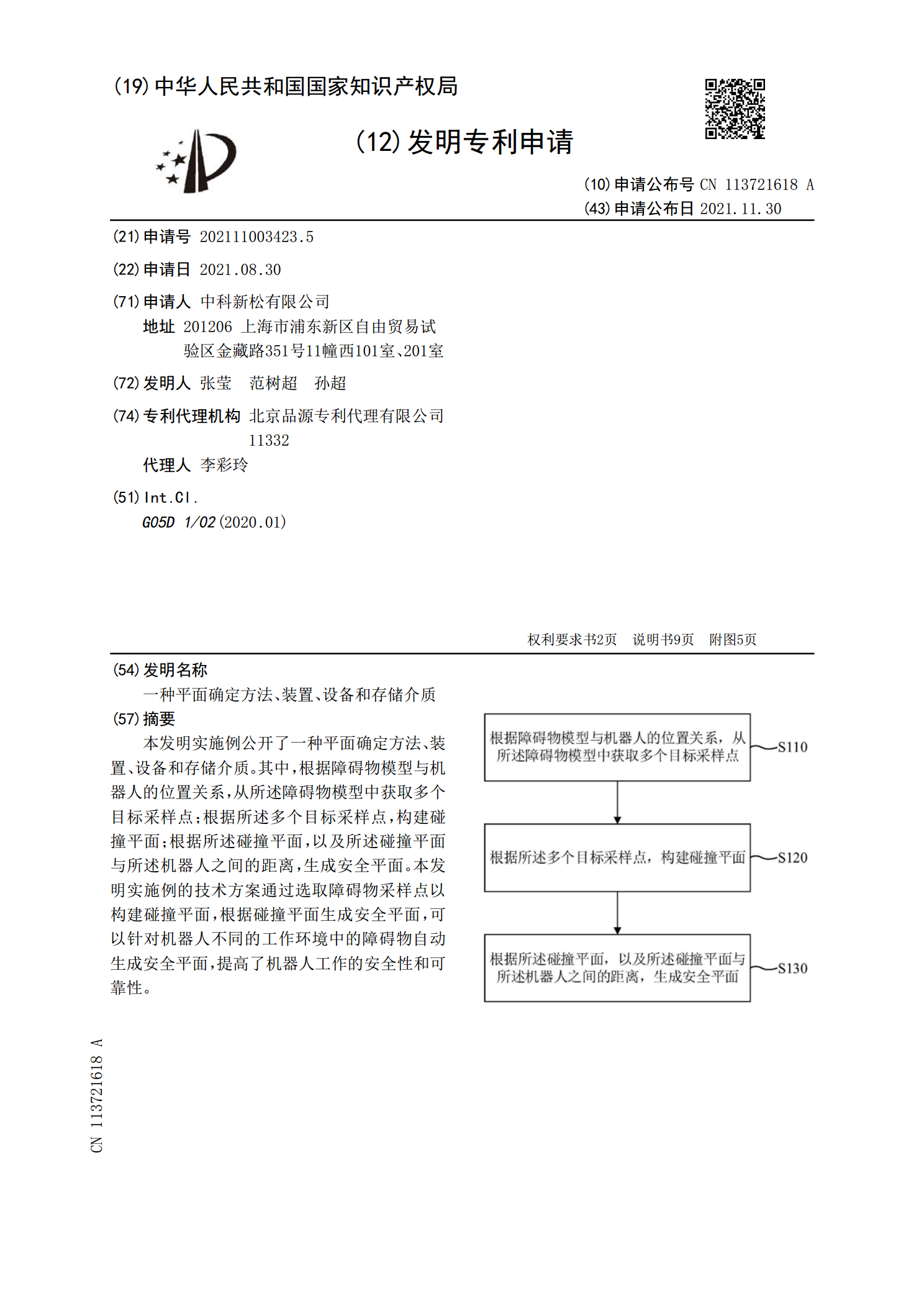
本发明实施例公开了一种平面确定方法、装置、设备和存储介质。其中,根据障碍物模型与机器人的位置关系,从所述障碍物模型中获取多个目标采样点;根据所述多个目标采样点,构建碰撞平面;根据所述碰撞平面,以及所述碰撞平面与所述机器人之间的距离,生成安全平面。本发明实施例的技术方案通过选取障碍物采样点以构建碰撞平面,根据碰撞平面生成安全平面,可以针对机器人不同的工作环境中的障碍物自动生成安全平面,提高了机器人工作的安全性和可靠性。
扫描平面确定方法、装置、设备及存储介质.pdf
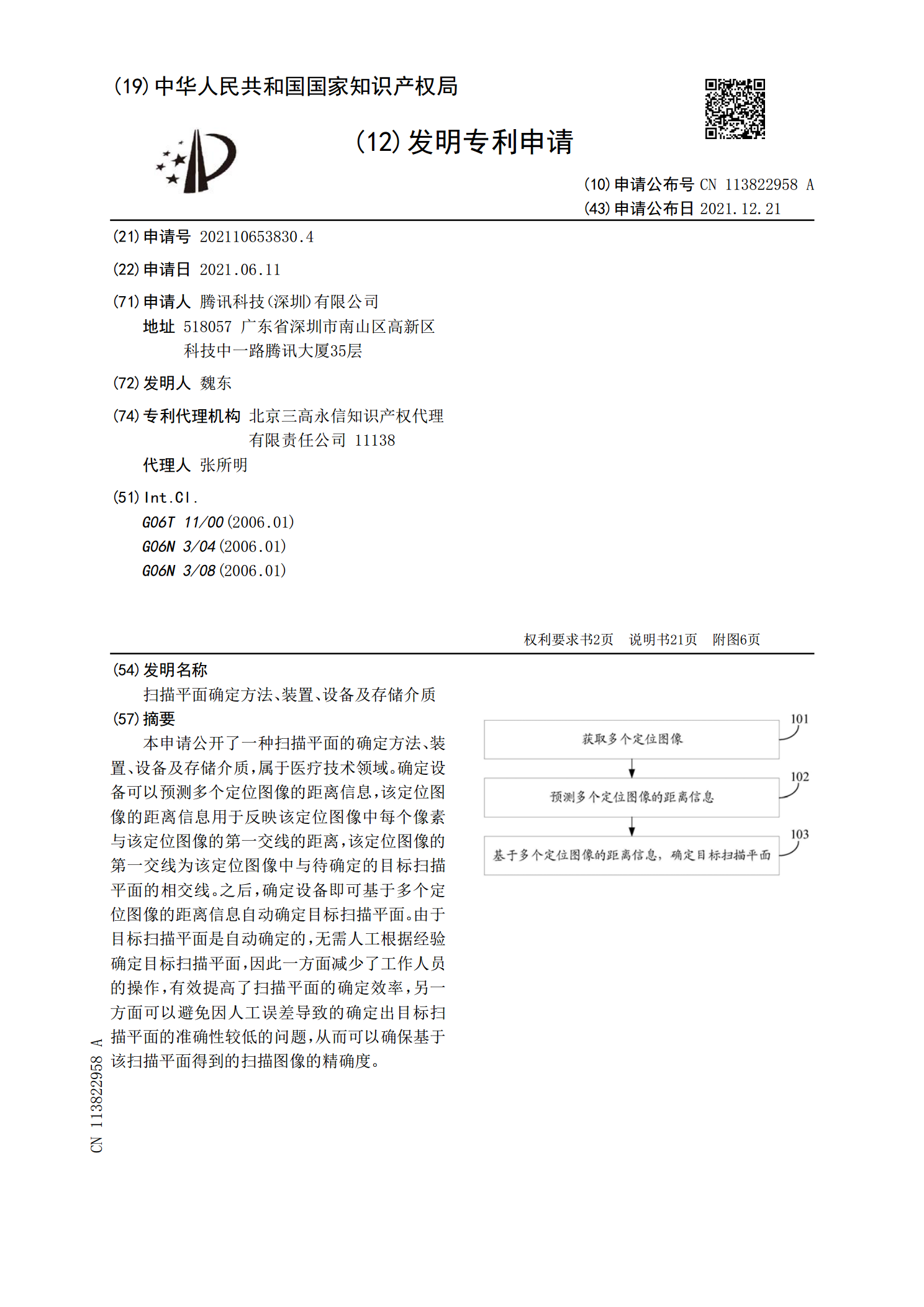
本申请公开了一种扫描平面的确定方法、装置、设备及存储介质,属于医疗技术领域。确定设备可以预测多个定位图像的距离信息,该定位图像的距离信息用于反映该定位图像中每个像素与该定位图像的第一交线的距离,该定位图像的第一交线为该定位图像中与待确定的目标扫描平面的相交线。之后,确定设备即可基于多个定位图像的距离信息自动确定目标扫描平面。由于目标扫描平面是自动确定的,无需人工根据经验确定目标扫描平面,因此一方面减少了工作人员的操作,有效提高了扫描平面的确定效率,另一方面可以避免因人工误差导致的确定出目标扫描平面的准确性

一种确定方法、装置、设备和存储介质.pdf
本发明公开了一种确定方法、装置、设备和存储介质。该方法包括:接收至少一个服务器节点发送的事务申请请求和虚事务申请请求;根据所述事务申请请求确定事务ID,根据所述虚事务申请请求确定虚事务ID;将所述事务ID和所述虚事务ID发送至所述至少一个服务器节点,以使所述至少一个服务器节点根据所述事务ID或者虚事务ID确定最小事务ID;根据所述至少一个服务器节点发送的最小事务ID确定全局最小事务ID。本发明实施例通过设置虚事务线程,能够保证各服务器节点收集自己的最小事务ID时能够把刚从元数据节点申请但尚未登记的事务ID
能量确定方法、装置、设备和存储介质.pdf
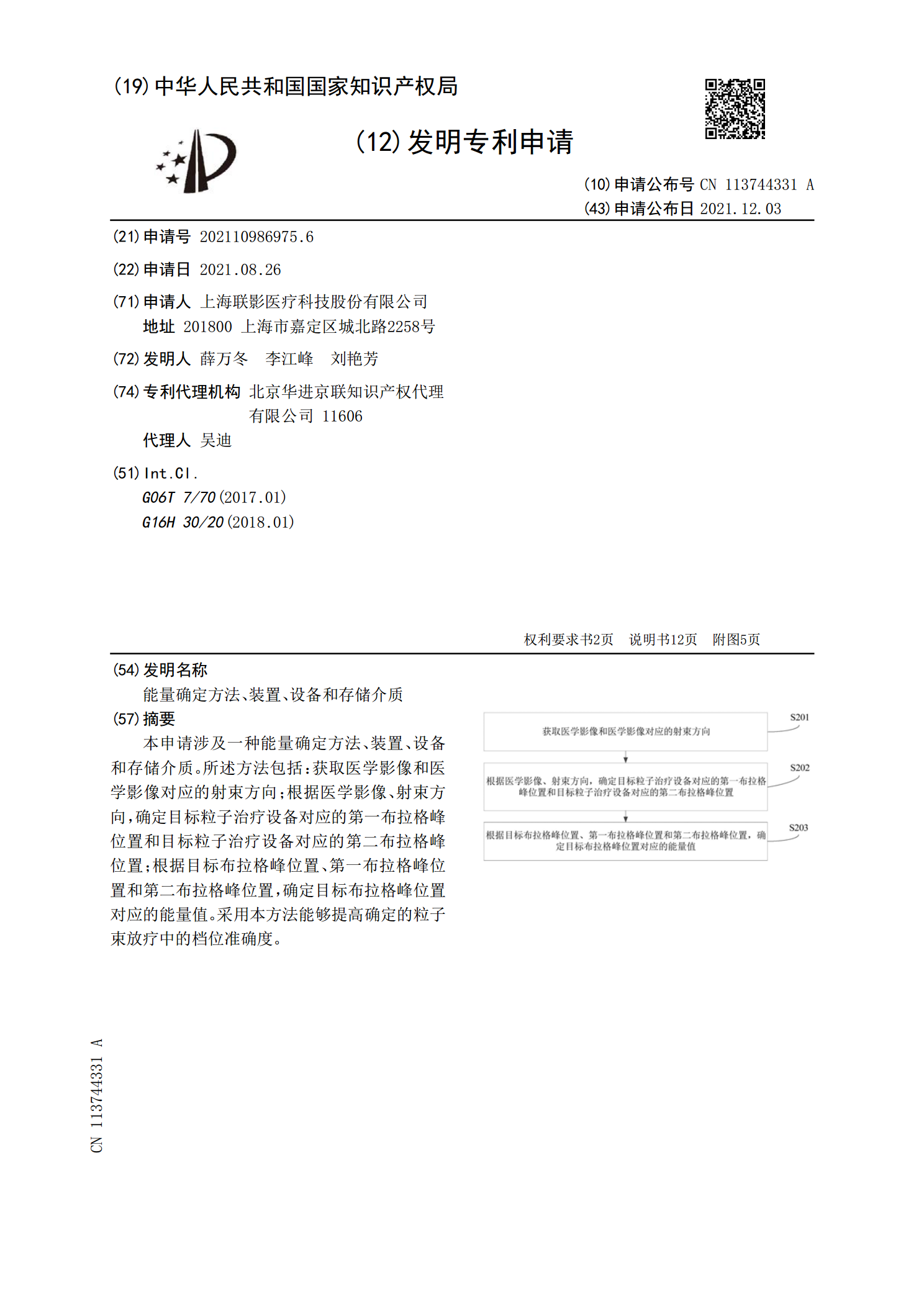
本申请涉及一种能量确定方法、装置、设备和存储介质。所述方法包括:获取医学影像和医学影像对应的射束方向;根据医学影像、射束方向,确定目标粒子治疗设备对应的第一布拉格峰位置和目标粒子治疗设备对应的第二布拉格峰位置;根据目标布拉格峰位置、第一布拉格峰位置和第二布拉格峰位置,确定目标布拉格峰位置对应的能量值。采用本方法能够提高确定的粒子束放疗中的档位准确度。

一种风机状态确定方法、装置、设备和存储介质.pdf
本发明公开了一种风机状态确定方法、装置、设备和存储介质。该方法包括:获取待评价风机的特征数据集合,其中,所述待评价风机的特征数据集合包括:风机数据、锅炉数据以及发电机组数据;根据评价指标对所述待评价风机的特征数据集合进行筛选,得到目标特征数据集合;根据所述目标特征数据集合确定所述待评价风机的状态信息。本发明实施例通过在确定风机运行状态对风机进行健康度评价时,考虑了风机和锅炉以及发电机组的关联性,获取到的特征数据更加全面,确定了合理的评价指标,使得对风机状态的确定更加准确有效,有利于保障风机安全可靠运行。