
基于北斗定位的大跨度桥梁主梁吊装方法.pdf

小宏****aa

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于北斗定位的大跨度桥梁主梁吊装方法.pdf
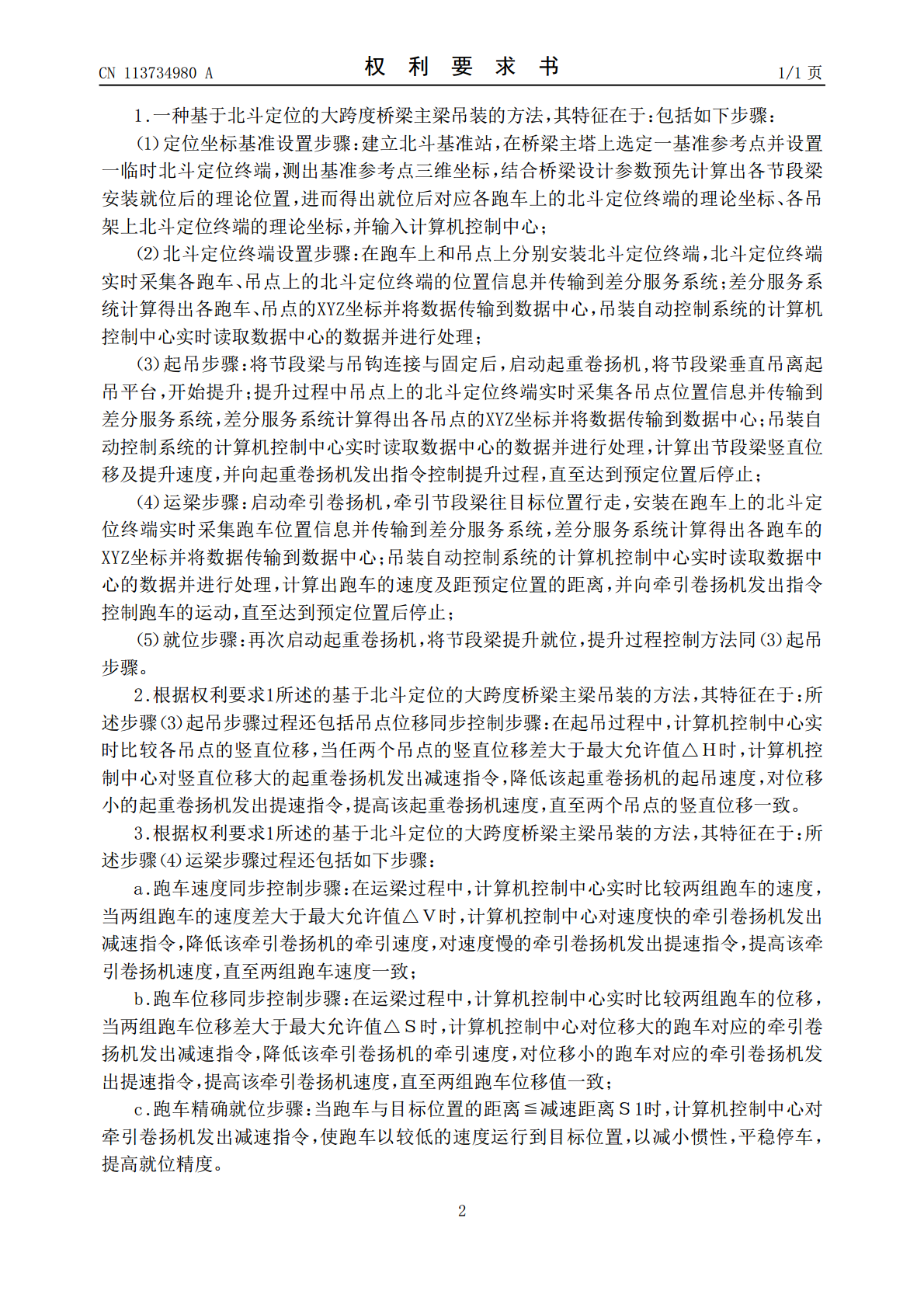
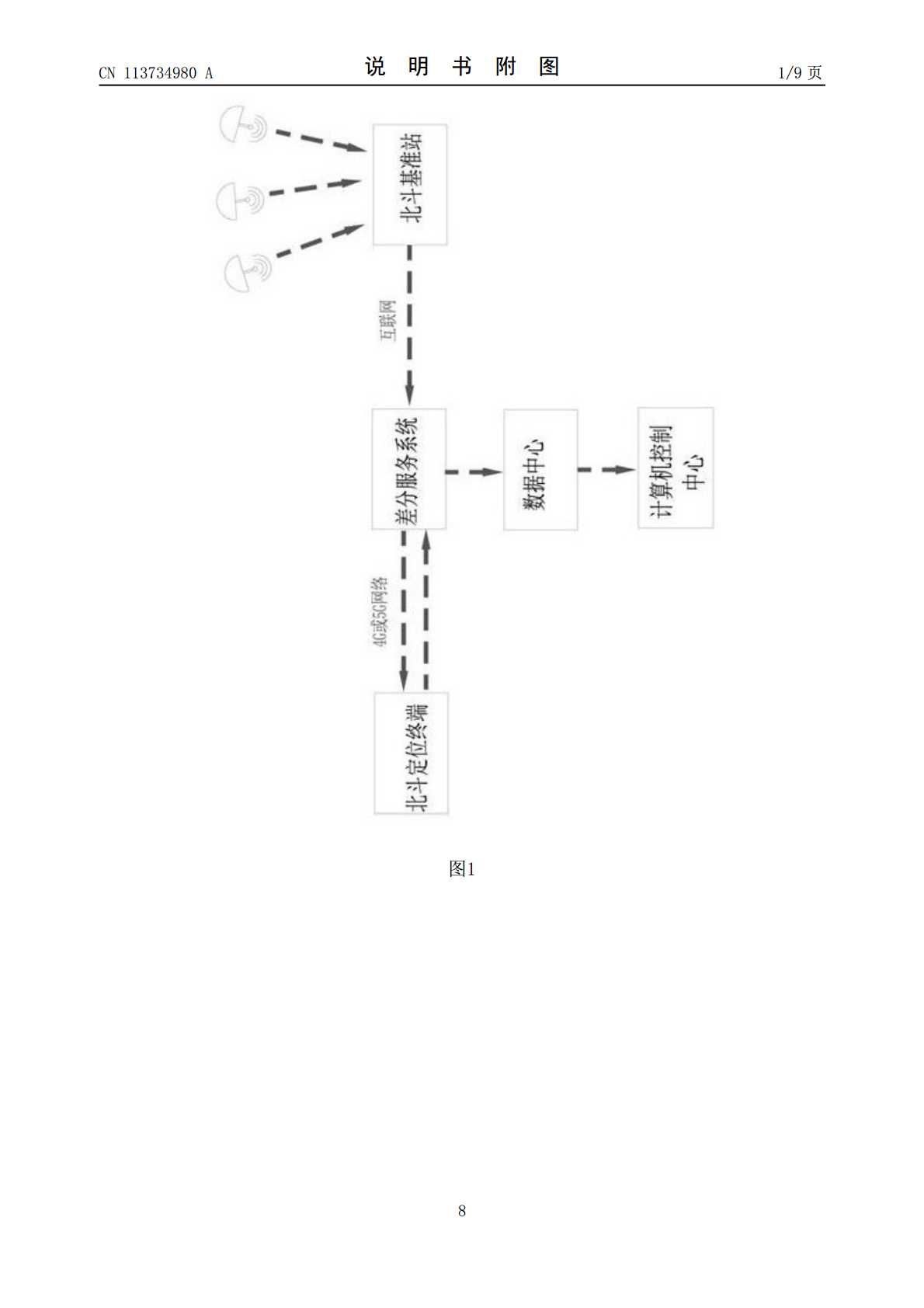
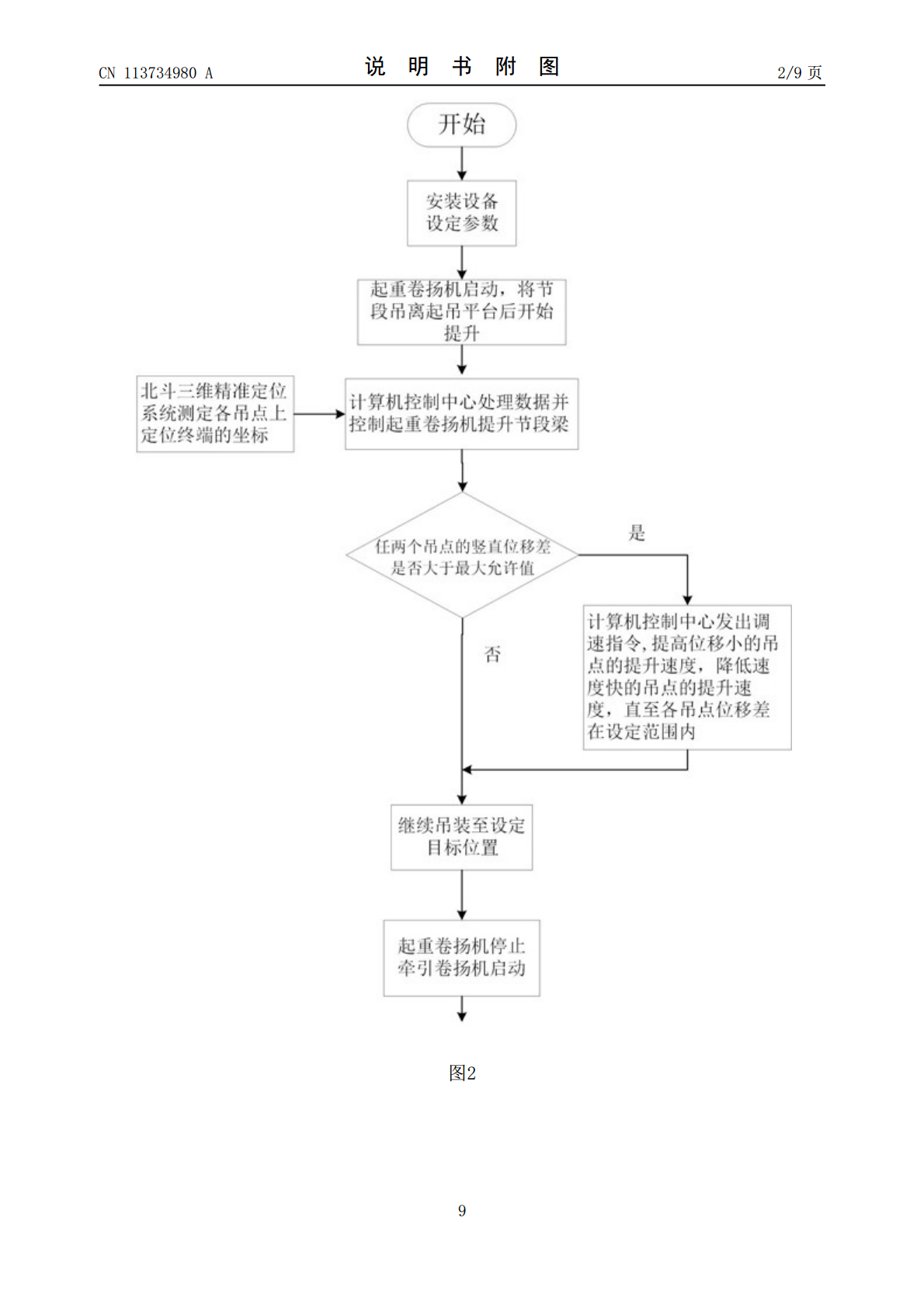
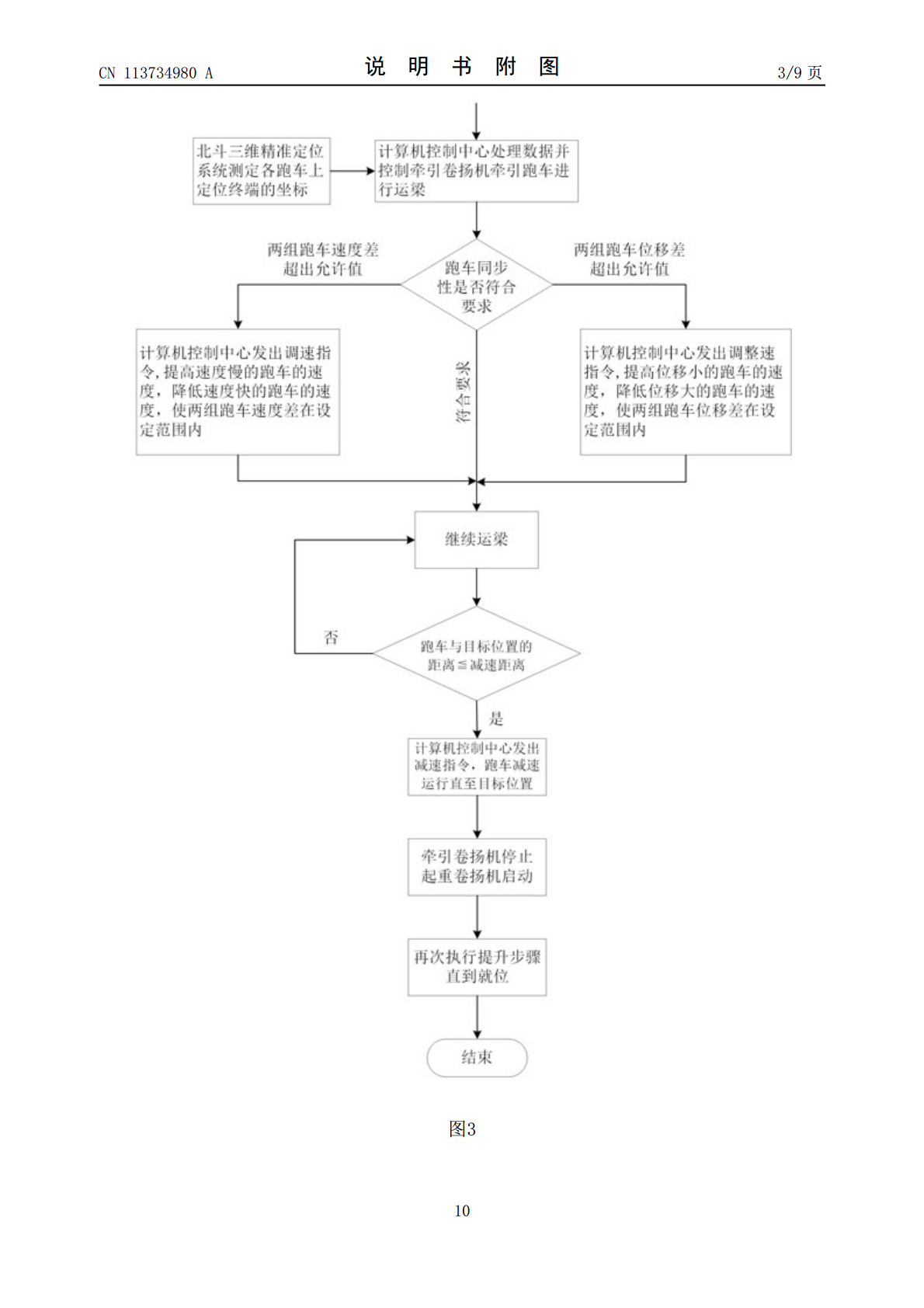
一种基于北斗定位的大跨度桥梁主梁吊装方法,包括三维精准定位系统、吊装自动控制系统;三维精准定位系统包括北斗基准站、北斗定位终端、差分服务系统和数据中心;北斗基准站以连续跟踪观测北斗卫星信号并提供定位的载波相位差分数据;北斗定位终端安装于跑车上和吊点上,获取对跑车和吊点的定位数据;吊装自动控制系统根据所述三维精准定位系统的数据中心的数据进行处理,控制跑车和吊点向目标运行。其优点是解决了现有技术因牵引索的弹性变形、位置变化造成测量精度不准确、通过对讲机配合人工操作造成控制精度不高,从而影响跑车停放精度和吊装精
基于北斗定位的大跨度桥梁主梁吊装系统.pdf
一种基于北斗定位的大跨度桥梁主梁吊装系统及方法,包括三维精准定位系统、吊装自动控制系统;三维精准定位系统包括北斗基准站、北斗定位终端、差分服务系统和数据中心;北斗基准站以连续跟踪观测北斗卫星信号并提供定位的载波相位差分数据;北斗定位终端安装于跑车上和吊点上,获取对跑车和吊点的定位数据;吊装自动控制系统根据所述三维精准定位系统的数据中心的数据并进行处理,控制跑车和吊点向目标运行。其优点是解决了现有技术因牵引索的弹性变形、位置变化造成测量精度不准确、通过对讲机配合人工操作造成控制精度不高,从而影响跑车停放精度

大跨度桥梁主梁自动限位及抗震装置.pdf
本实用新型涉及一种大跨度桥梁主梁自动限位及抗震装置,包括安装在桥塔上的主梁,所述主梁的横向两侧与桥塔的对应侧部之间均设置有限位及抗震机构,所述限位及抗震机构均包括横向安装在桥塔侧部的伸缩缸,所述伸缩缸的伸缩杆均经横向安装的弹簧与主梁的侧部相顶接。(1)可通过伸缩缸的伸缩杆伸缩使弹簧变形,伸缩杆的伸缩量不同,则千斤顶的受力大小不同,控制限位及抗震机构与主梁间受力大小,在限制主梁横向位移的同时延长机构使用寿命;(2)安装方便且适应性强,可用于不同大跨度桥型;(3)发生损坏后可更换。

大跨度连续梁竖向预应力钢绞线吊装定位安装方法及装置.pdf
本发明提供了一种大跨度连续梁竖向预应力钢绞线吊装定位安装方法及装置,利用工字钢加工固定,将竖向预应力钢绞线固定在定位工字钢的支撑架上,与挂篮行走轨道及菱形架连接,使其形成一个吊装整体,通过塔吊进行整体吊装固定,按照设计位置定位竖向预应力钢绞线,保证竖向预应力的定位安装与固定,实现与挂篮走行同步,能够提升安装精度,减少人力资源,提高效率和施工质量。

大跨度桥梁沿跨向主梁涡激振动研究的综述报告.docx
大跨度桥梁沿跨向主梁涡激振动研究的综述报告大跨度桥梁是工程结构的代表之一,由于其跨度较大,结构复杂,常在强风、高速流等环境条件下运行,因此在设计和建造过程中需要特别关注其受力和振动特性以确保安全可靠。其中,沿跨向主梁的涡激振动是大跨度桥梁振动特性中的一个重要问题,本文将对该问题的研究现状进行综述。涡激振动是指当风穿过桥墩或悬索塔等结构物时,会形成一片旋转的气流,这种旋转气流与结构物相互作用产生的振动现象。涡激振动在大跨度桥梁中的出现往往会导致桥梁结构的损坏,甚至危及整个桥梁的安全。在实际工程中,涡激振动对