
一种目标检测跟踪的方法和装置.pdf

书生****专家


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种目标检测跟踪的方法和装置.pdf
本申请公开了一种目标检测跟踪的方法和装置,用以提供一种稳定性以及鲁棒性更好的目标检测跟踪方法。该方法包括:获取至少一张图像;通过深度卷积网络对所述图像进行目标检测与显著性检测,得到至少N个建议对象信息以及显著性图像,所述N为正整数,所述建议对象信息包括所述建议对象在所述图像中的位置以及所述建议对象的类别;预测所述建议对象中目标对象的下一步运动轨迹,所述目标对象为交集比例不小于比例阈值的建议对象,所述交集比例为建议对象在所述图像中的位置与显著性区域之间的交集与并集的比例。通过该方法,在确定目标对象时,结合显
一种目标跟踪方法和装置.pdf
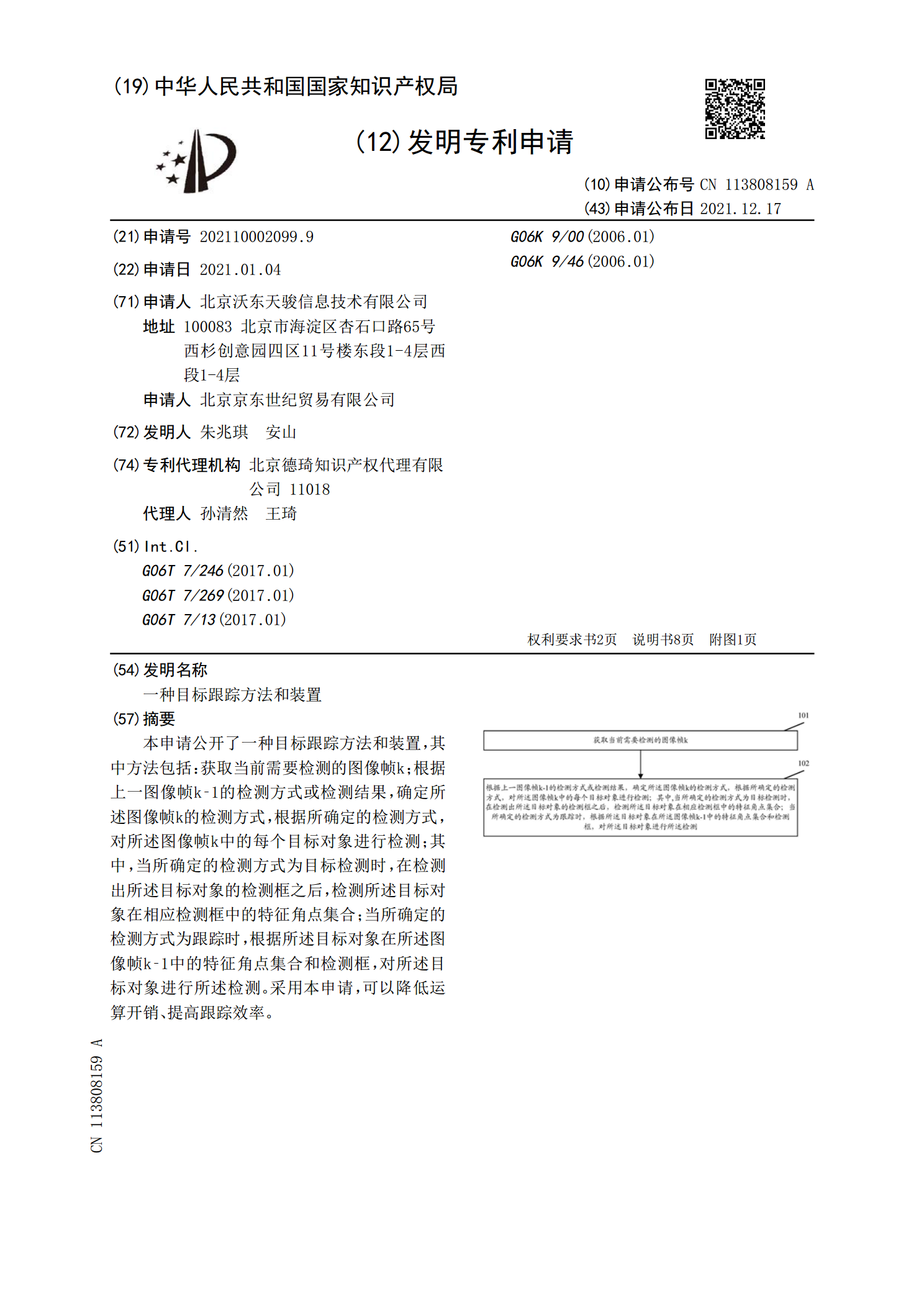
本申请公开了一种目标跟踪方法和装置,其中方法包括:获取当前需要检测的图像帧k;根据上一图像帧k‑1的检测方式或检测结果,确定所述图像帧k的检测方式,根据所确定的检测方式,对所述图像帧k中的每个目标对象进行检测;其中,当所确定的检测方式为目标检测时,在检测出所述目标对象的检测框之后,检测所述目标对象在相应检测框中的特征角点集合;当所确定的检测方式为跟踪时,根据所述目标对象在所述图像帧k‑1中的特征角点集合和检测框,对所述目标对象进行所述检测。采用本申请,可以降低运算开销、提高跟踪效率。
一种目标跟踪方法和装置.pdf
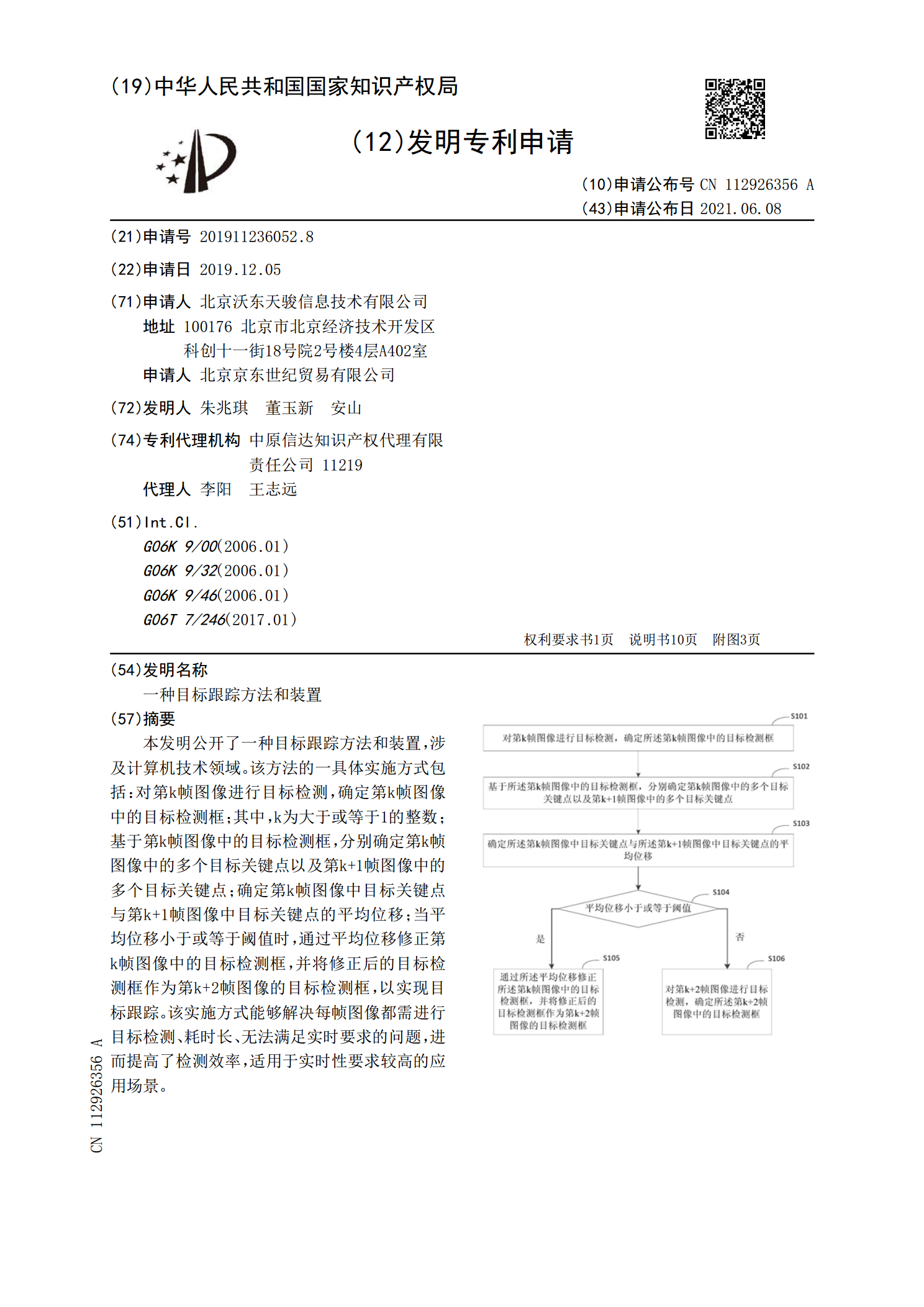
本发明公开了一种目标跟踪方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:对第k帧图像进行目标检测,确定第k帧图像中的目标检测框;其中,k为大于或等于1的整数;基于第k帧图像中的目标检测框,分别确定第k帧图像中的多个目标关键点以及第k+1帧图像中的多个目标关键点;确定第k帧图像中目标关键点与第k+1帧图像中目标关键点的平均位移;当平均位移小于或等于阈值时,通过平均位移修正第k帧图像中的目标检测框,并将修正后的目标检测框作为第k+2帧图像的目标检测框,以实现目标跟踪。该实施方式能够解决每帧图像都需
一种目标检测跟踪方法、装置及设备.pdf
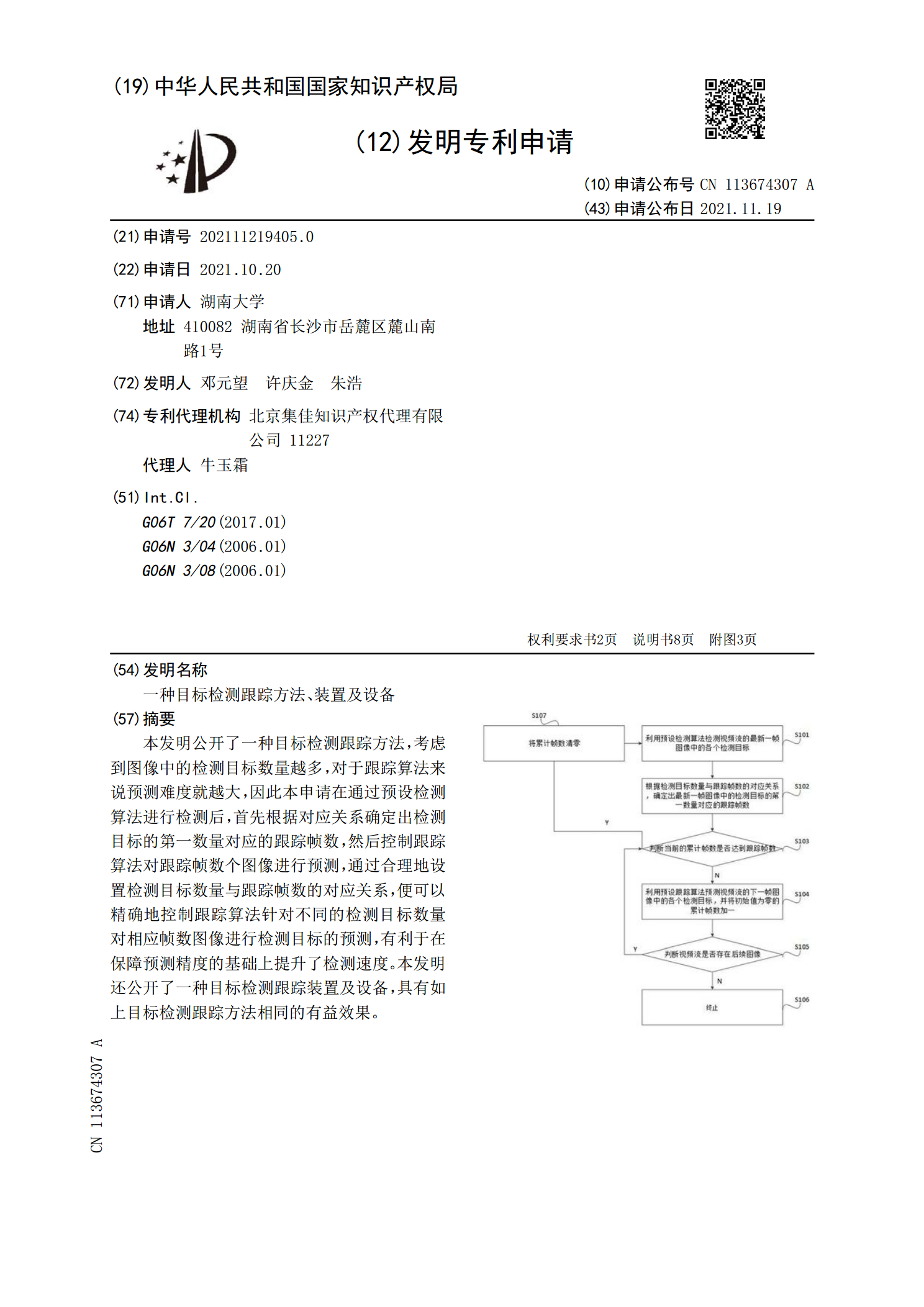
本发明公开了一种目标检测跟踪方法,考虑到图像中的检测目标数量越多,对于跟踪算法来说预测难度就越大,因此本申请在通过预设检测算法进行检测后,首先根据对应关系确定出检测目标的第一数量对应的跟踪帧数,然后控制跟踪算法对跟踪帧数个图像进行预测,通过合理地设置检测目标数量与跟踪帧数的对应关系,便可以精确地控制跟踪算法针对不同的检测目标数量对相应帧数图像进行检测目标的预测,有利于在保障预测精度的基础上提升了检测速度。本发明还公开了一种目标检测跟踪装置及设备,具有如上目标检测跟踪方法相同的有益效果。
训练目标跟踪模型和目标跟踪的方法和装置.pdf
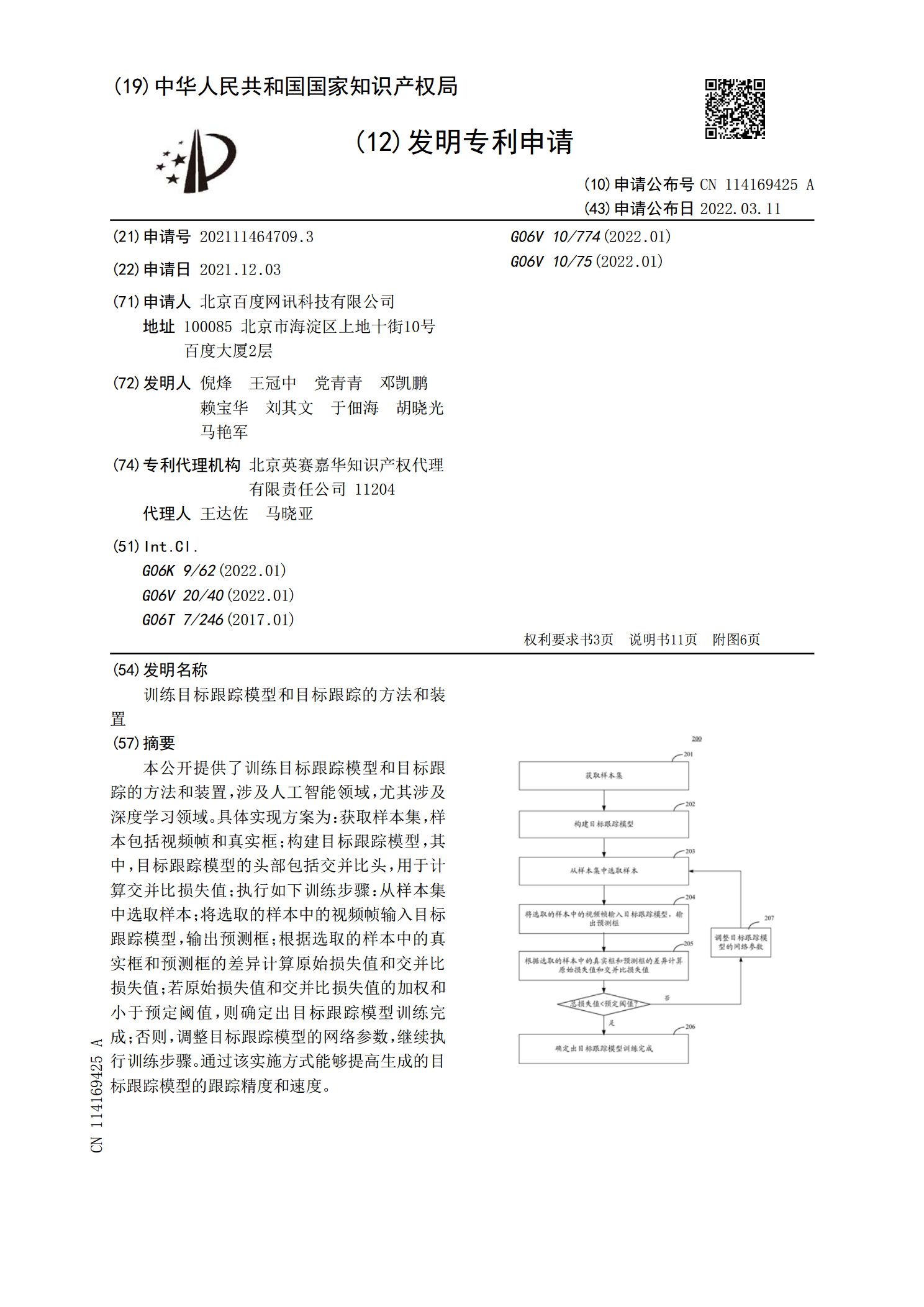
本公开提供了训练目标跟踪模型和目标跟踪的方法和装置,涉及人工智能领域,尤其涉及深度学习领域。具体实现方案为:获取样本集,样本包括视频帧和真实框;构建目标跟踪模型,其中,目标跟踪模型的头部包括交并比头,用于计算交并比损失值;执行如下训练步骤:从样本集中选取样本;将选取的样本中的视频帧输入目标跟踪模型,输出预测框;根据选取的样本中的真实框和预测框的差异计算原始损失值和交并比损失值;若原始损失值和交并比损失值的加权和小于预定阈值,则确定出目标跟踪模型训练完成;否则,调整目标跟踪模型的网络参数,继续执行训练步骤。