
轮毂电机驱动车辆的车轮转矩协调控制方法及装置.pdf

一条****涛k


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮毂电机驱动车辆的车轮转矩协调控制方法及装置.pdf
本发明提供一种轮毂电机驱动车辆的车轮转矩协调控制方法及装置。该方法包括:确定轮毂电机全驱动车辆的行驶状态参数及道路关键特征参数;根据前轮转角的大小,利用行驶状态参数及道路关键特征参数,基于层次化纵向驱动力协调控制策略、模型预测控制的车辆横摆与侧倾稳定性集成控制策略、模型预测控制的每个车轮对地面压力或附着系数的制止空转滑转的独立控制策略,来确定目标车轮力矩值,将其输出到车辆电驱动系统,实现车辆在直行和转向工况下车轮差动扭矩的协调独立控制,以及在复杂工况下不滑转空转的差动扭矩协调独立控制。采用本发明方法,提高

一种轮毂电机驱动车辆的转矩分配方法.pdf
本申请涉及一种轮毂电机驱动车辆的转矩分配的方法,通过对轮毂电机和机械制动器的输出转矩进行分配,实现车辆操纵稳定性所需的整车目标控制力和力矩。所述转矩分配方法包含以下步骤:一、采用最优控制分配方法,根据整车需求纵向合力,整车需求侧向合力以及整车需求横摆力矩,对电动轮纵向力建立最优控制分配方程;二、根据建立的电动轮纵向力最优控制分配方程,求解得到各电动轮纵向力最优解,结合电动轮输出转矩与电动轮纵向力的关系,得到电动轮输出转矩;三、根据轮毂电机转矩与机械制动器转矩的关系,得到轮毂电机输出转矩和制动器输出转矩。

具有行星电机的轮毂驱动装置及采用该轮毂驱动装置的车轮动力系统.pdf
一种具有行星电机的轮毂驱动装置,包括:行星电机,包括齿圈定子及设于齿圈定子的径向内侧的多个行星转子;行星机构,用于匹配行星电机与轮毂的转速和转矩,行星机构包括行星架、齿圈及多个行星齿轮;多个行星齿轮设于齿圈径向内侧;多个行星齿轮均与齿圈相啮合,使多个行星齿轮沿齿圈的内周缘可滚动;多个行星齿轮分别与多个行星转子一一对应设置,并且多个行星齿轮分别与多个行星转子共轴连接;多个行星齿轮分别通过转轴与行星架可转动连接,使行星架随着多个行星齿轮相对于齿圈滚动而转动。上述轮毂驱动装置具有较高的功率密度、较高的可靠性及故
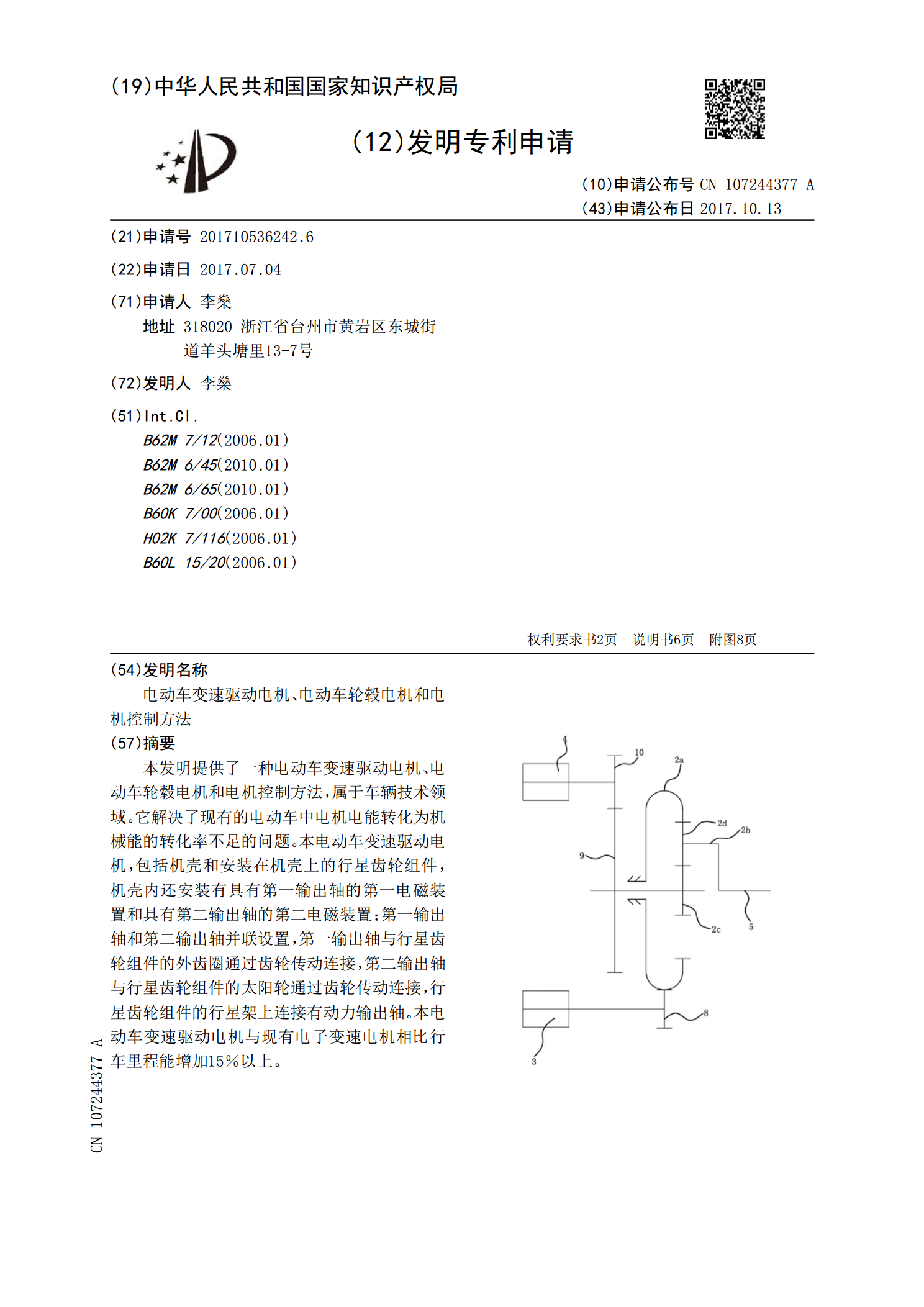
电动车变速驱动电机、电动车轮毂电机和电机控制方法.pdf
本发明提供了一种电动车变速驱动电机、电动车轮毂电机和电机控制方法,属于车辆技术领域。它解决了现有的电动车中电机电能转化为机械能的转化率不足的问题。本电动车变速驱动电机,包括机壳和安装在机壳上的行星齿轮组件,机壳内还安装有具有第一输出轴的第一电磁装置和具有第二输出轴的第二电磁装置;第一输出轴和第二输出轴并联设置,第一输出轴与行星齿轮组件的外齿圈通过齿轮传动连接,第二输出轴与行星齿轮组件的太阳轮通过齿轮传动连接,行星齿轮组件的行星架上连接有动力输出轴。本电动车变速驱动电机与现有电子变速电机相比行车里程能增加1
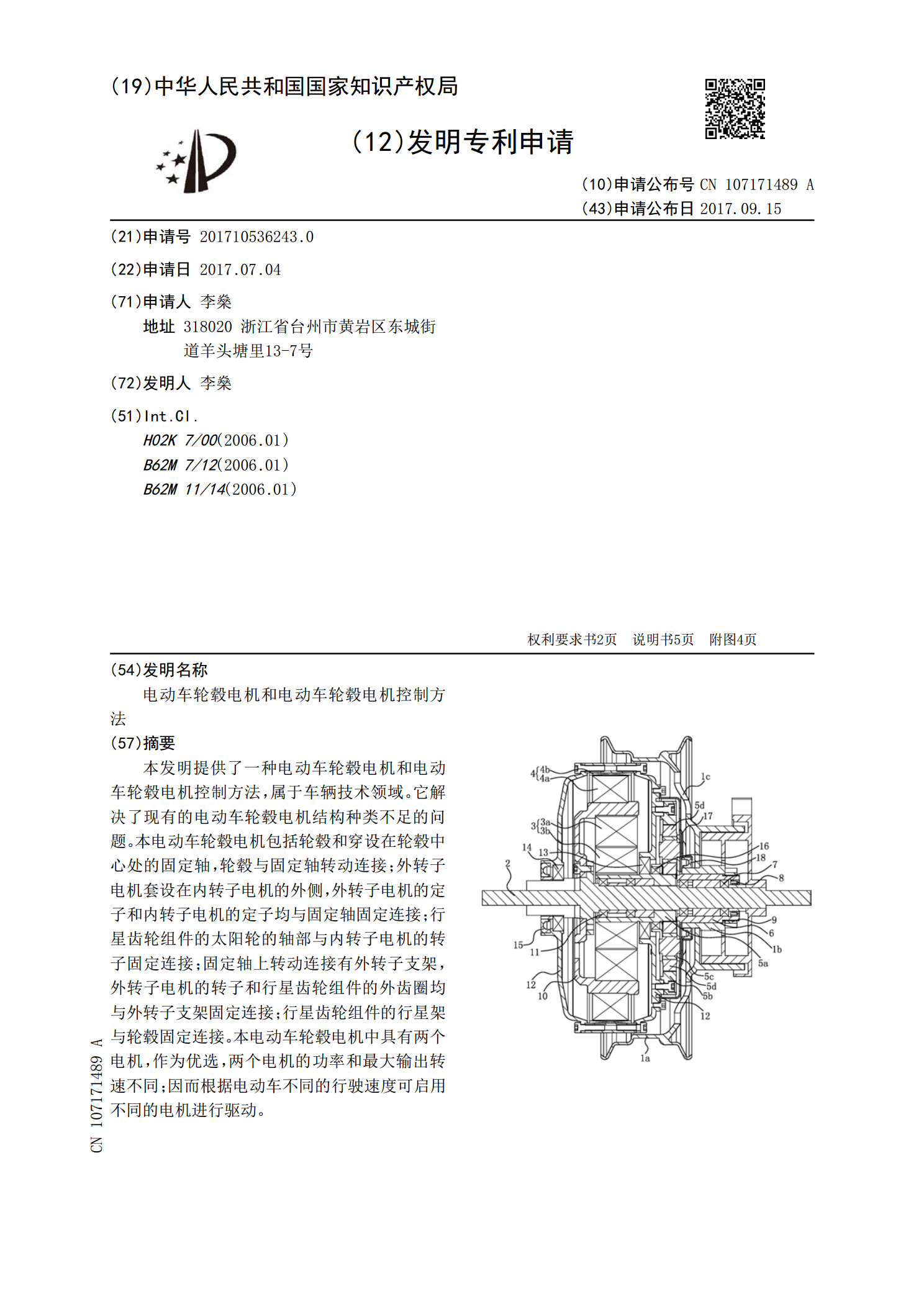
电动车轮毂电机和电动车轮毂电机控制方法.pdf
本发明提供了一种电动车轮毂电机和电动车轮毂电机控制方法,属于车辆技术领域。它解决了现有的电动车轮毂电机结构种类不足的问题。本电动车轮毂电机包括轮毂和穿设在轮毂中心处的固定轴,轮毂与固定轴转动连接;外转子电机套设在内转子电机的外侧,外转子电机的定子和内转子电机的定子均与固定轴固定连接;行星齿轮组件的太阳轮的轴部与内转子电机的转子固定连接;固定轴上转动连接有外转子支架,外转子电机的转子和行星齿轮组件的外齿圈均与外转子支架固定连接;行星齿轮组件的行星架与轮毂固定连接。本电动车轮毂电机中具有两个电机,作为优选,两