
一种红外光谱图像测量对准方法、装置及介质.pdf

猫巷****晓容


1/9

2/9
3/9

4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种红外光谱图像测量对准方法、装置及介质.pdf
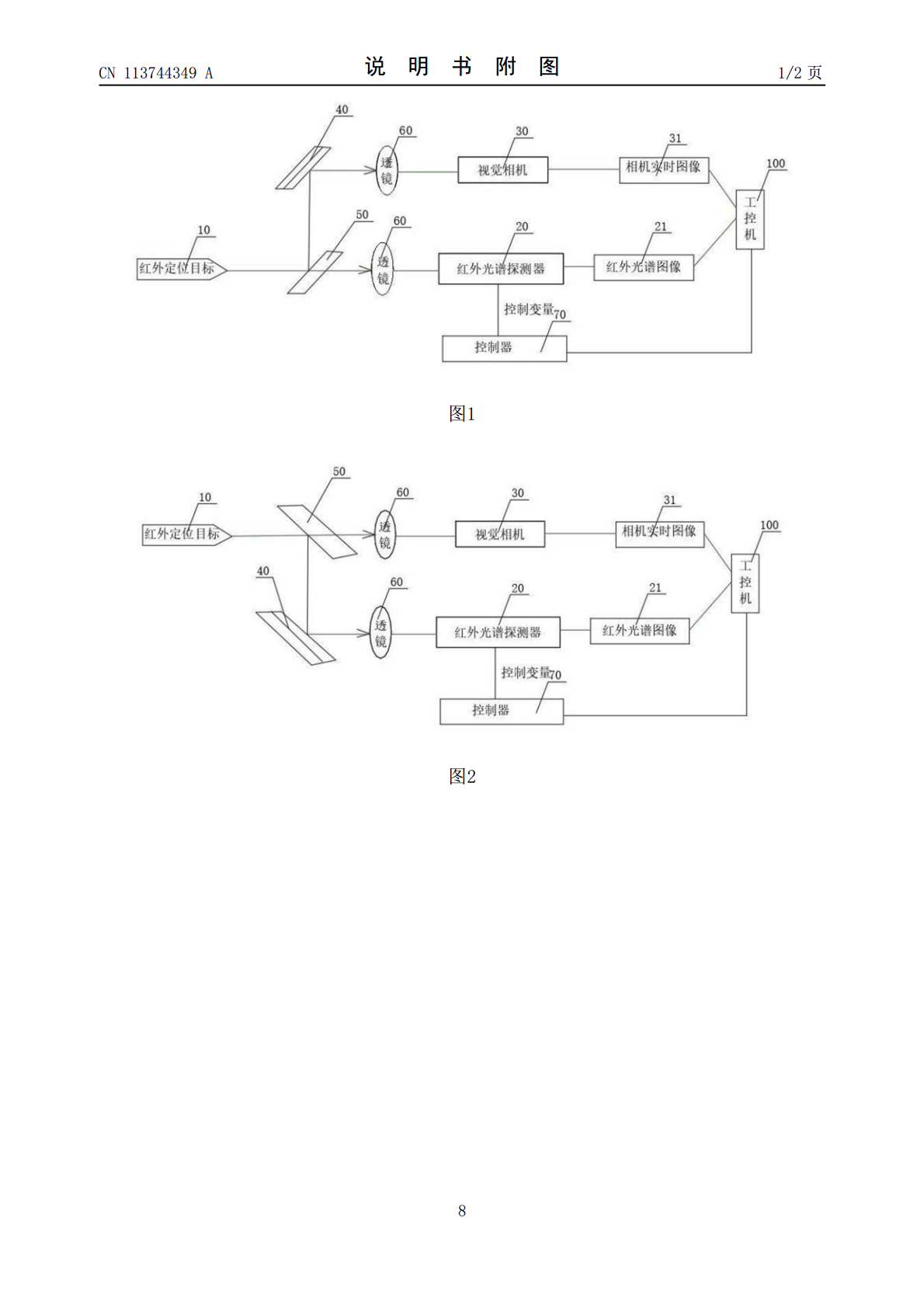
本发明公开了一种红外光谱图像测量对准方法、装置及介质,方法包括红外定位目标、红外光谱探测器及视觉相机,所述红外光谱探测器探测所述红外定位目标形成红外光谱图像;所述视觉相机对所述红外定位目标进行实时图像采集形成相机实时图像;建立所述红外光谱图像与所述相机实时图像的空间映射关系,根据所述空间映射关系以及所述相机实时图像对准所述红外定位目标,红外光谱图像测量对准装置包括存储器、处理器及红外光谱图像测量对准程序,采用平行光路非成像光谱测量结合视觉相机方案,成本低,同时通过对所述红外光谱图像与所述相机实时图像进行标
一种图像对准方法及装置.pdf
本发明提供了一种图像对准方法及装置,其中,该方法包括:通过图像采集设备获取被测样品的初始图像,初始图像满足预设的对焦要求;在初始图像中确定初始角点;通过图像采集设备获取被测样品的当前图像;在当前图像中确定与初始角点对应的当前角点;调节被测样品和图像采集设备在x轴方向,和/或,y轴方向的相对位置,使当前角点位于初始角点所在位置;调节图像采集设备的焦距,和/或,被测样品和图像采集设备在z轴方向的相对位置,使图像采集设备获取的对准图像满足预设的对焦要求。通过实施本发明获取的对准图像不仅与初始图像的视场相同,而且
一种红外图像与可见光图像融合方法、装置及存储介质.pdf
本发明提供一种红外图像与可见光图像融合方法、装置及存储介质,其方法包括,对红外和可见光图像进行差分计算,得到差分图像;根据全变分模型分别对红外图像、可见光图像及差分图像进行分解计算,分别得到各个图像的卡通纹理分量成分;构建狼群优化迭代算法的适应度函数;在各分解的分量成分中确定权重项以及权重系数,并进行加权计算,根据计算结果得到待融合图像。将源图像和差分图像分解为卡通纹理分量成分,通过狼群优化迭代算法从源图像和分量成分中确定权重项和权重系数,将确定的权重项和权重系数进行加权组合,以获取最终的融合图像结果,融
红外图像处理方法、装置、设备及存储介质.pdf
一种红外图像处理方法,装置,设备及存储介质,方法包括:获取拍摄装置(10)从不同方位采集的多张第一红外图像(S101);对多张第一红外图像分别进行图像增强处理,获取多张第二红外图像;以及,对多张第二红外图像进行配准,确定第二红外图像之间的相对方位(S102);根据第二红外图像之间的相对方位,融合多张第一红外图像,获得用于测温的第一目标红外图像(S103)。有利于提高融合拼接得到的第一目标红外图像的拼接效果,进一步提高第一目标红外图像的测温精度。

红外图像与深度图像融合方法、系统、装置及存储介质.pdf
本发明属于电力设备状态监测技术领域,具体涉及一种基于注意力机制的红外图像与深度图像融合方法及系统。针对现有电力设备状态识别方法准确性较低的不足,本发明采用如下技术方案:一种基于注意力机制的红外图像与深度图像融合方法,应用于预先构建的生成对抗网络,所述生成对抗网络包括生成器、注意力特征提取模块及判别器,包括:获取红外图像和深度图像,分别进行编码;对编码后的度图像进行注意力特征提取,得到融合图像;对所述融合图像进行检测,得到红外图像细节及深度图像细节。本发明的有益效果是:采用深度图像可以适应图像焦距差异,抑制