
风力发电机组控制方法、装置及电子设备.pdf

一只****呀盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
风力发电机组控制方法、装置及电子设备.pdf
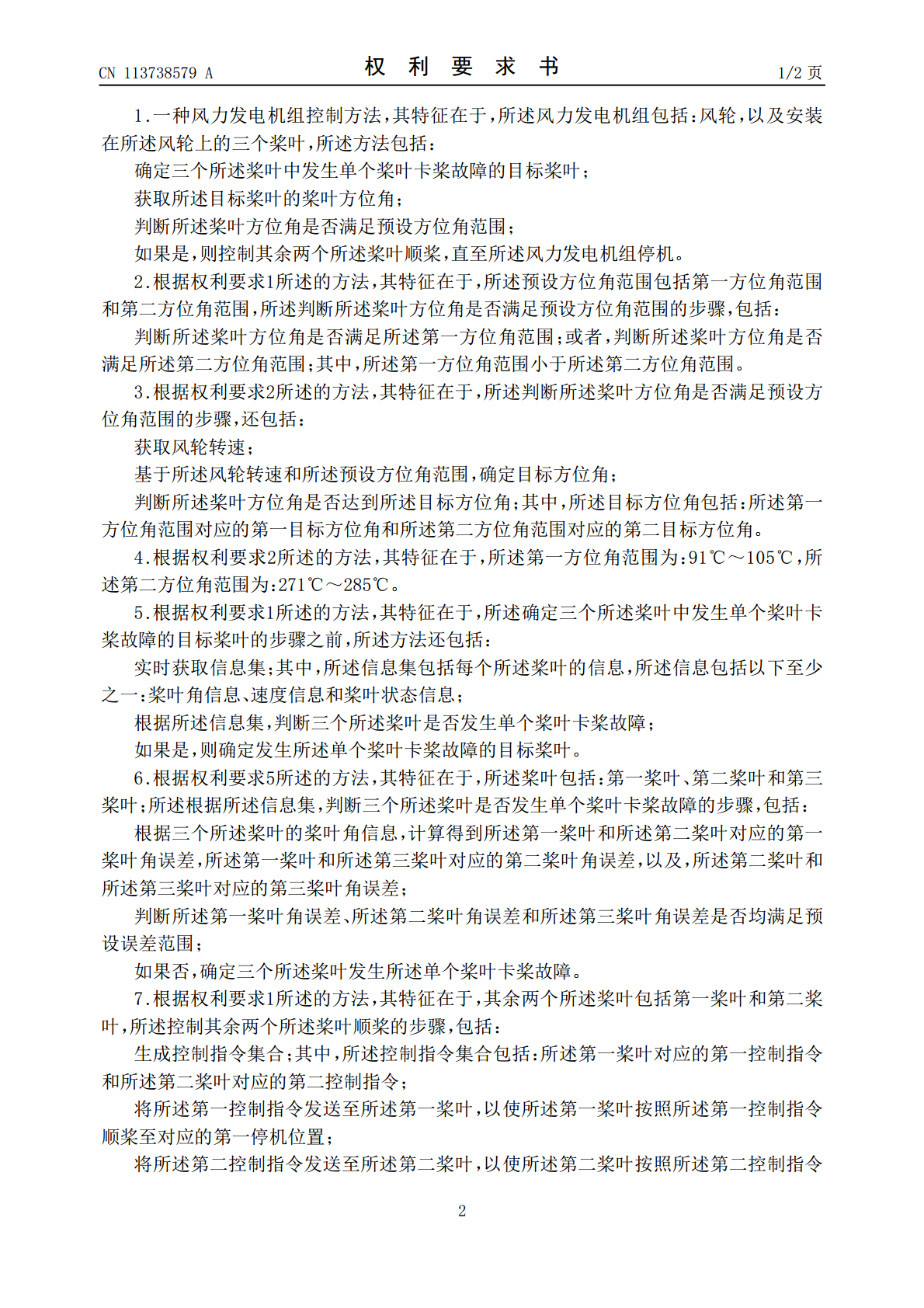
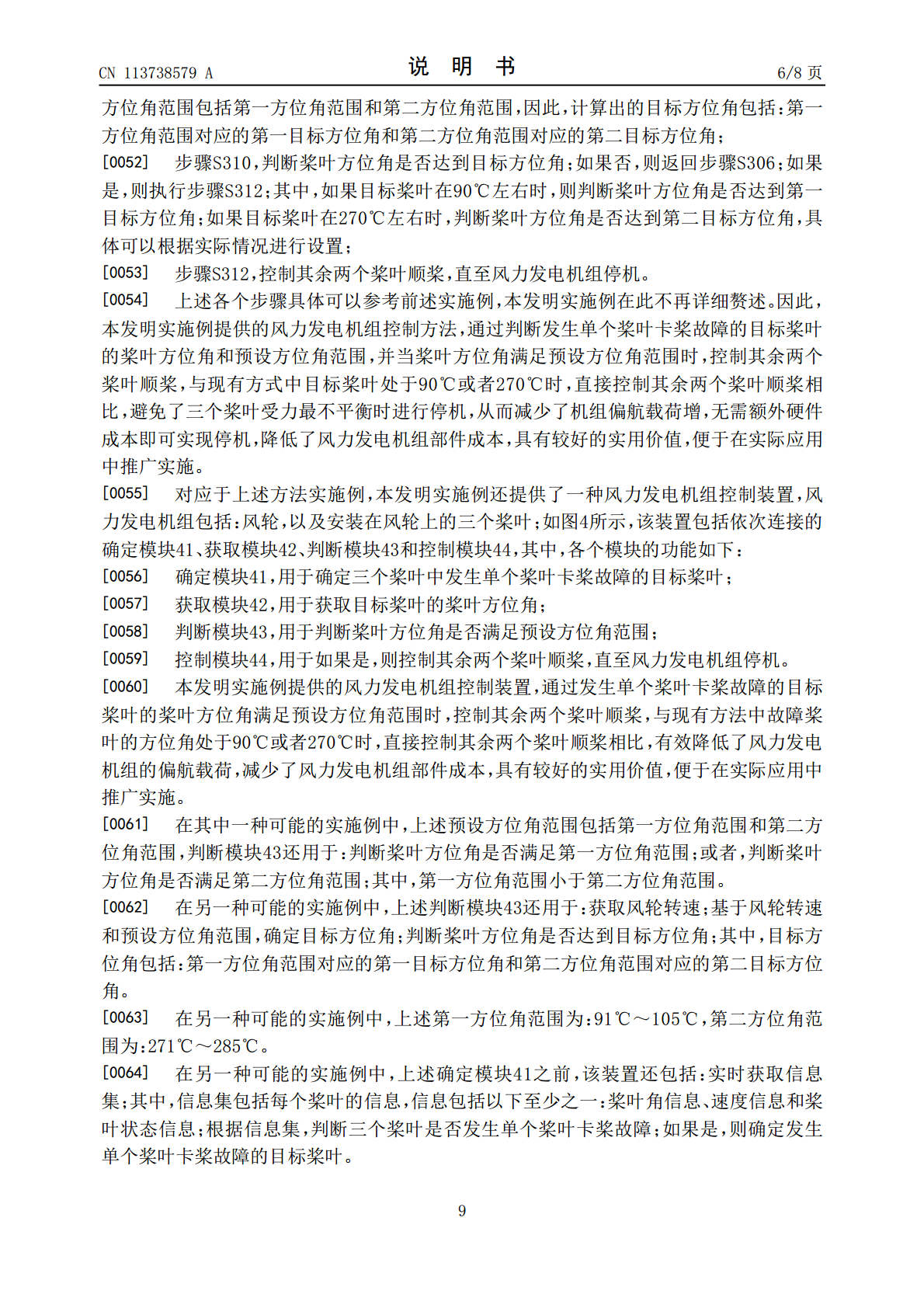
本发明提供了风力发电机组控制方法、装置及电子设备;其中,该方法包括:确定三个桨叶中发生单个桨叶卡桨故障的目标桨叶;获取目标桨叶的桨叶方位角;判断桨叶方位角是否满足预设方位角范围;如果是,则控制其余两个桨叶顺桨,直至风力发电机组停机,该方式中,通过发生单个桨叶卡桨故障的目标桨叶的桨叶方位角满足预设方位角范围时,控制其余两个桨叶顺桨,与现有方法中故障桨叶的方位角处于90℃或者270℃时,直接控制其余两个桨叶顺桨相比,有效降低了风力发电机组的偏航载荷,减少了风力发电机组部件成本,具有较好的实用价值,便于在实际应
风力发电机控制方法、装置、风力发电机组及电子设备.pdf
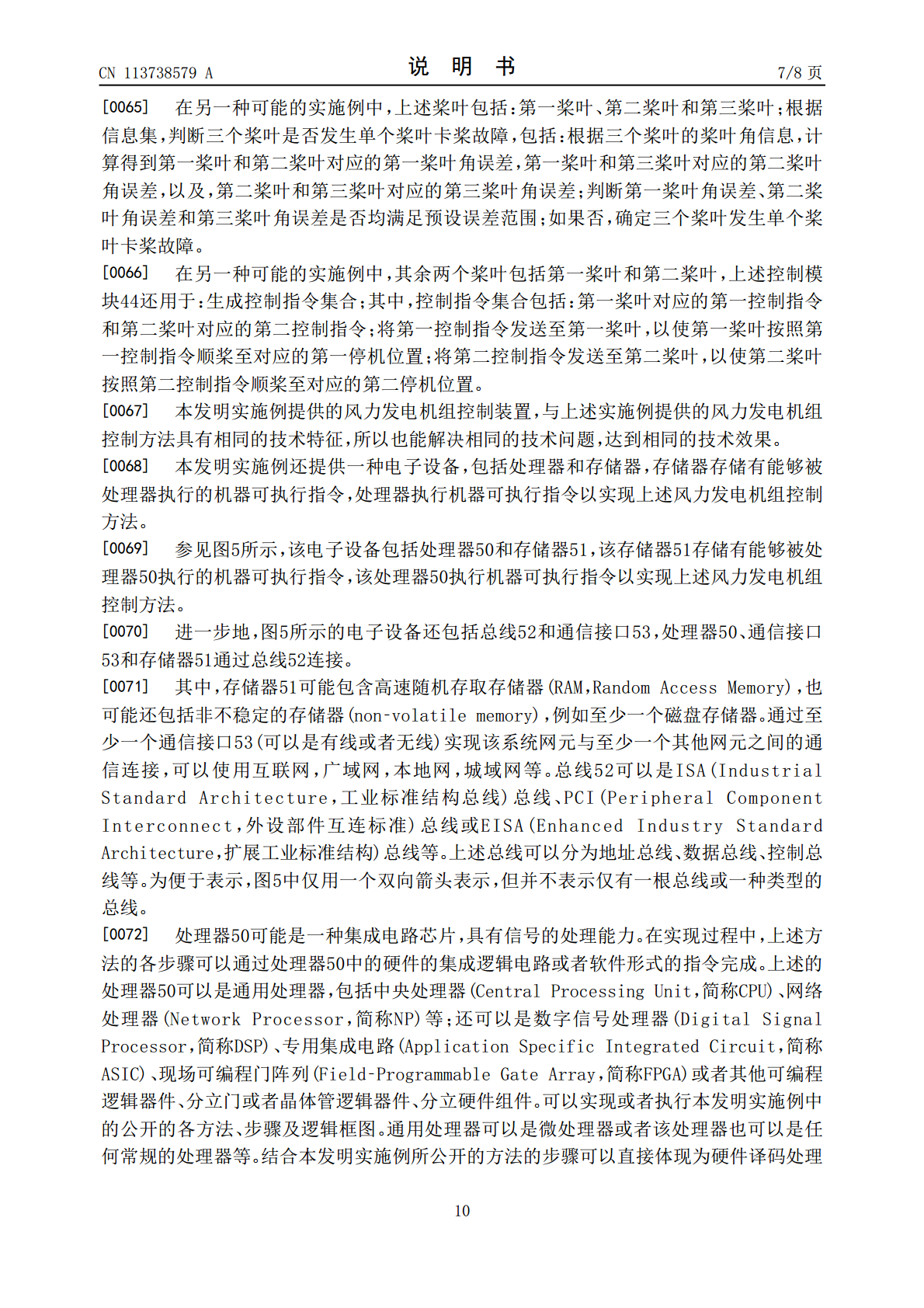
本发明提供一种风力发电机控制方法、装置、风力发电机组及电子设备,属于自动化控制技术领域,包括:获取待测风力发电机的目标工作参数在目标时段内的目标曲线;基于目标曲线获取风力发电机在所述目标时段内的目标频谱图;基于对目标频谱图的频谱分析结果,调整待测风力发电机控制器中与至少一个特征频率所对应的带阻滤波器的通断状态。本发明在现有的采用固定滤波器的基础上,根据对目标曲线的频谱分析结果,在不存在频谱波动时减少带阻滤波器的数量,可以有效降低转速滤波的滞后,提高系统的响应速度;在频谱发生波动时及时切入对应频率的带阻滤波
风力发电机组的控制方法、装置及电子设备.pdf
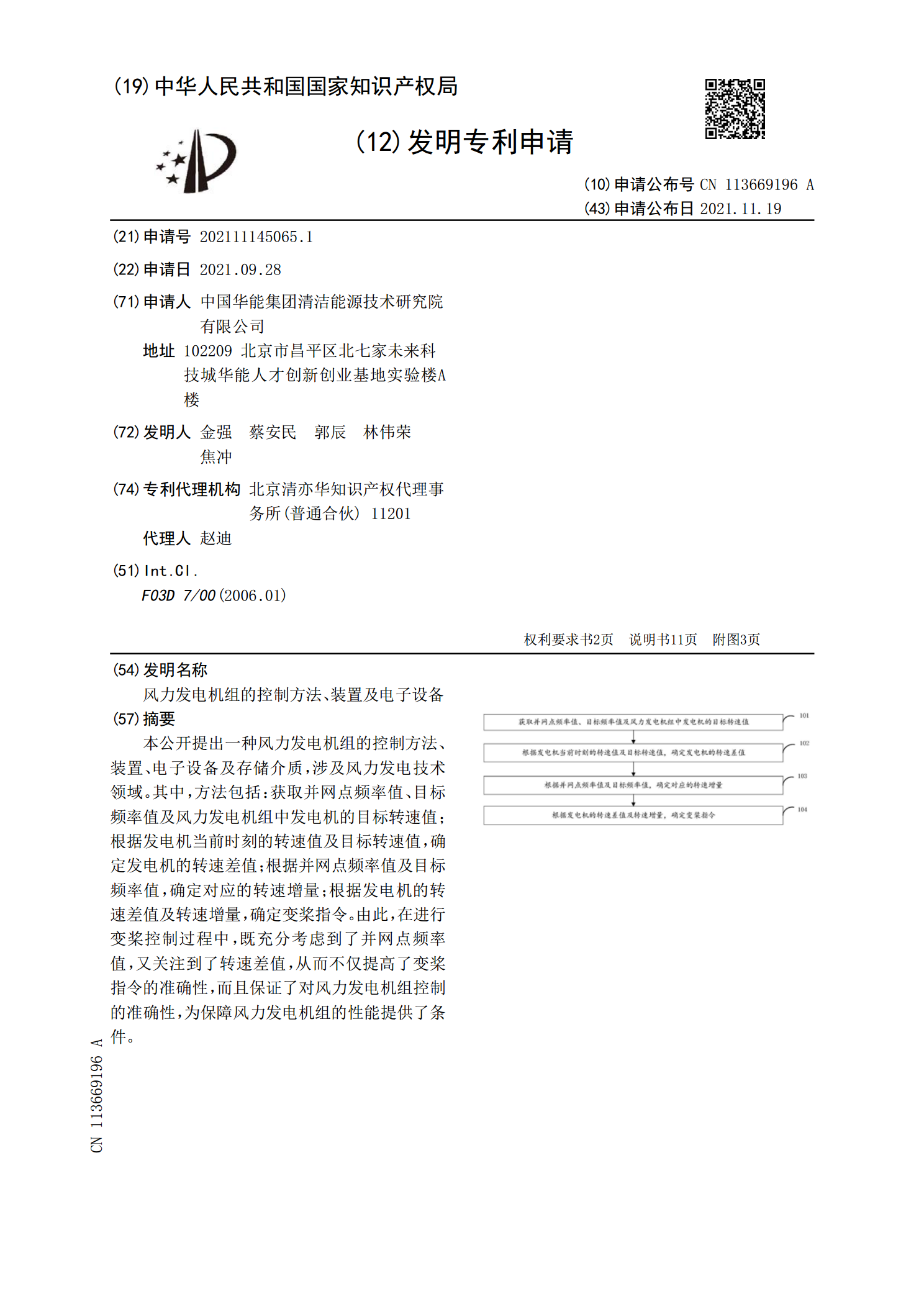
本公开提出一种风力发电机组的控制方法、装置、电子设备及存储介质,涉及风力发电技术领域。其中,方法包括:获取并网点频率值、目标频率值及风力发电机组中发电机的目标转速值;根据发电机当前时刻的转速值及目标转速值,确定发电机的转速差值;根据并网点频率值及目标频率值,确定对应的转速增量;根据发电机的转速差值及转速增量,确定变桨指令。由此,在进行变桨控制过程中,既充分考虑到了并网点频率值,又关注到了转速差值,从而不仅提高了变桨指令的准确性,而且保证了对风力发电机组控制的准确性,为保障风力发电机组的性能提供了条件。
风力发电机组的控制方法、装置及电子设备.pdf
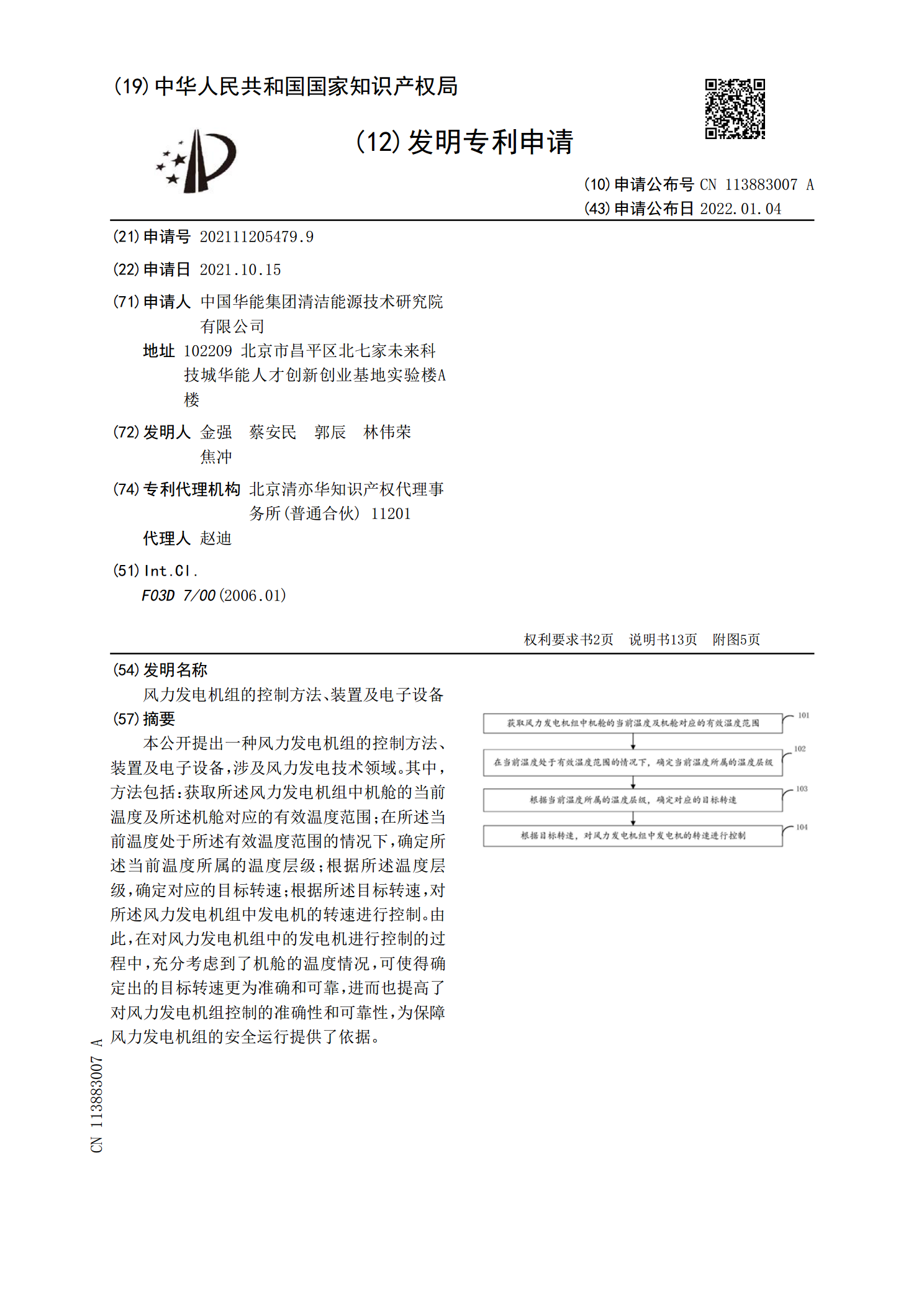
本公开提出一种风力发电机组的控制方法、装置及电子设备,涉及风力发电技术领域。其中,方法包括:获取所述风力发电机组中机舱的当前温度及所述机舱对应的有效温度范围;在所述当前温度处于所述有效温度范围的情况下,确定所述当前温度所属的温度层级;根据所述温度层级,确定对应的目标转速;根据所述目标转速,对所述风力发电机组中发电机的转速进行控制。由此,在对风力发电机组中的发电机进行控制的过程中,充分考虑到了机舱的温度情况,可使得确定出的目标转速更为准确和可靠,进而也提高了对风力发电机组控制的准确性和可靠性,为保障风力发电

风力发电机组结冰控制装置及控制方法.pdf
本发明提供了一种风力发电机组结冰控制装置,其包括:风轮系统、机舱系统、环境测量系统、风机数据采集与监视控制系统、塔筒、载荷传感器和计算机中央处理系统,所述风轮系统包括叶片、轮毂系统以及其间连接的变桨轴承,所述环境测量系统、所述风机数据采集与监视控制系统、所述载荷传感器均与所述计算机中央处理系统连接并将数据传输给所述计算机中央处理系统。另外,还提供一种风力发电机组结冰控制方法。本发明可以自动检测风力发电机组是否结冰并根据设定自动控制停机和开机程序,提高风力发电机组的安全和自动操作性能。