
无人机降落方法、装置、无人机系统、机场、设备和介质.pdf

大渊****公主


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人机降落方法、装置、无人机系统、机场、设备和介质.pdf
本发明实施例公开了一种无人机降落方法、装置、无人机系统、机场、设备和介质,所述无人机降落方法包括:当接收到降落指令时,确定降落点的环境状态,根据所确定的降落点的环境状态确定用于定位无人机与降落点之间相对位置的目标定位方式,根据所述目标定位方式控制无人机降落。通过本发明实施例的技术方案,实现了使无人机在自动机场应用中能够精准的降落在自动机场起降平台上,更加稳定可靠,提高了无人机的降落精度。

基于Apriltag的无人机降落方法、装置、介质和电子设备.pdf
本发明涉及一种基于Apriltag的无人机降落方法、装置、存储介质以及电子设备,该方法包括:获取无人机对目标降落中心点拍摄的当前帧图像,并识别获得Apriltag标签。计算无人机相对于Apriltag标签的位置偏移量,并对位置偏移量的计算过程进行计时。若计算过程的计时时长超过预设时长,获取当前帧图像之前的预设数量帧图像。根据预设数量帧图像,获得对应的预设数量的位置偏移量。利用二次指数平滑方法对预设数量的位置偏移量进行拟合,建立位置偏移量预测模型,预测获得当前帧图像对应的位置偏移量。根据所述当前帧图像对应的
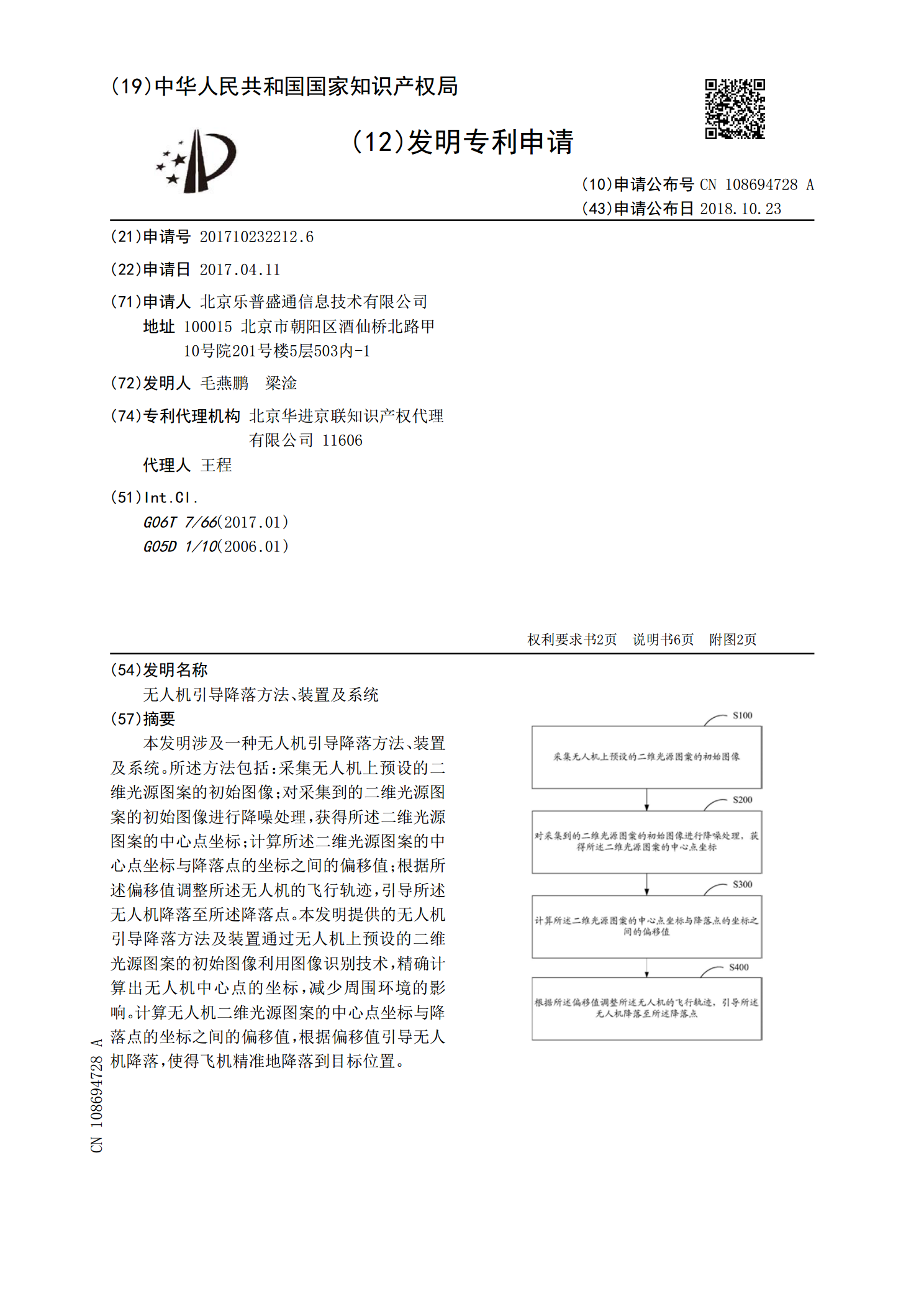
无人机引导降落方法、装置及系统.pdf
本发明涉及一种无人机引导降落方法、装置及系统。所述方法包括:采集无人机上预设的二维光源图案的初始图像;对采集到的二维光源图案的初始图像进行降噪处理,获得所述二维光源图案的中心点坐标;计算所述二维光源图案的中心点坐标与降落点的坐标之间的偏移值;根据所述偏移值调整所述无人机的飞行轨迹,引导所述无人机降落至所述降落点。本发明提供的无人机引导降落方法及装置通过无人机上预设的二维光源图案的初始图像利用图像识别技术,精确计算出无人机中心点的坐标,减少周围环境的影响。计算无人机二维光源图案的中心点坐标与降落点的坐标之间
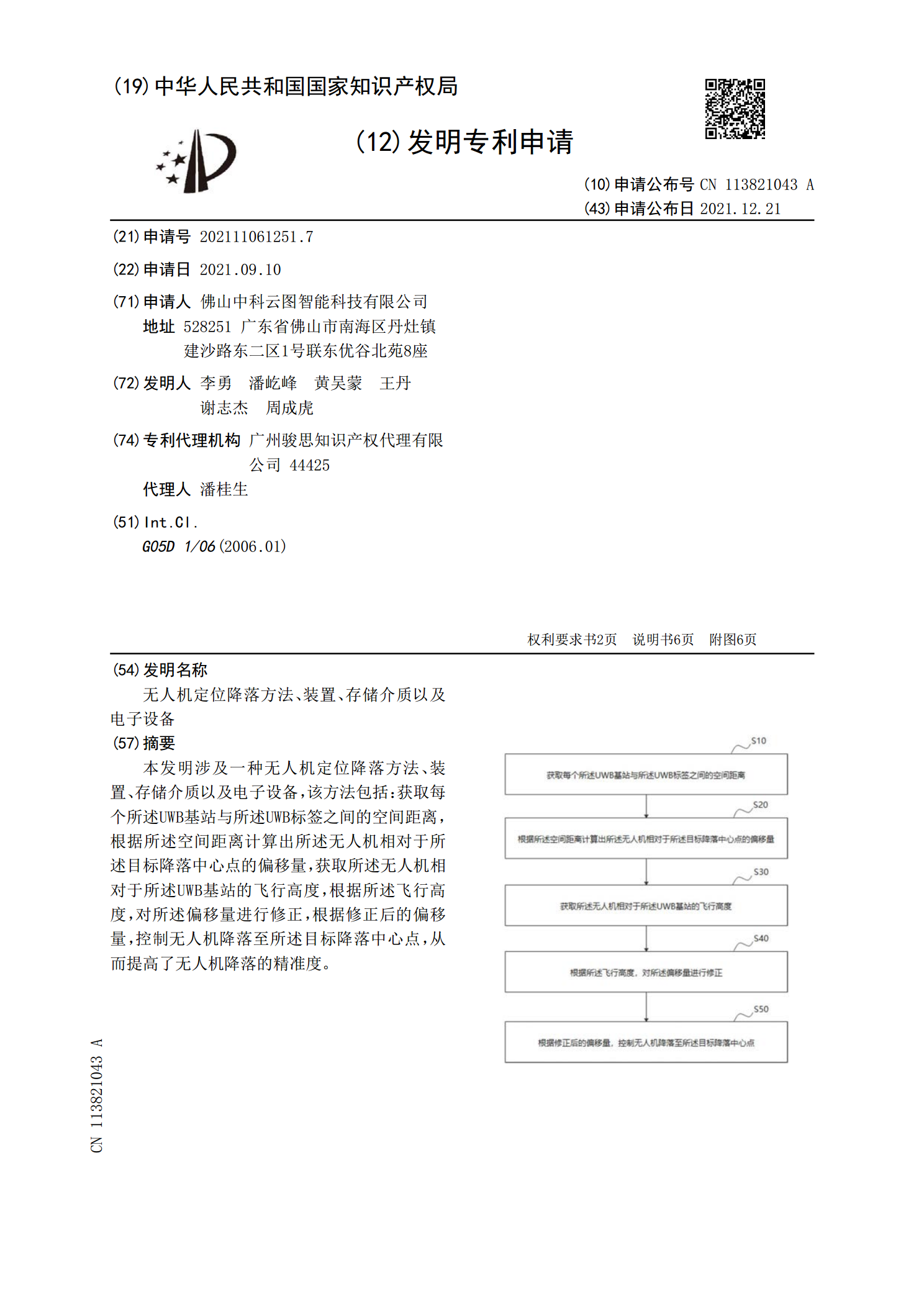
无人机定位降落方法、装置、存储介质以及电子设备.pdf
本发明涉及一种无人机定位降落方法、装置、存储介质以及电子设备,该方法包括:获取每个所述UWB基站与所述UWB标签之间的空间距离,根据所述空间距离计算出所述无人机相对于所述目标降落中心点的偏移量,获取所述无人机相对于所述UWB基站的飞行高度,根据所述飞行高度,对所述偏移量进行修正,根据修正后的偏移量,控制无人机降落至所述目标降落中心点,从而提高了无人机降落的精准度。
海上风机巡检无人机辅助降落方法、系统、装置及存储介质.pdf
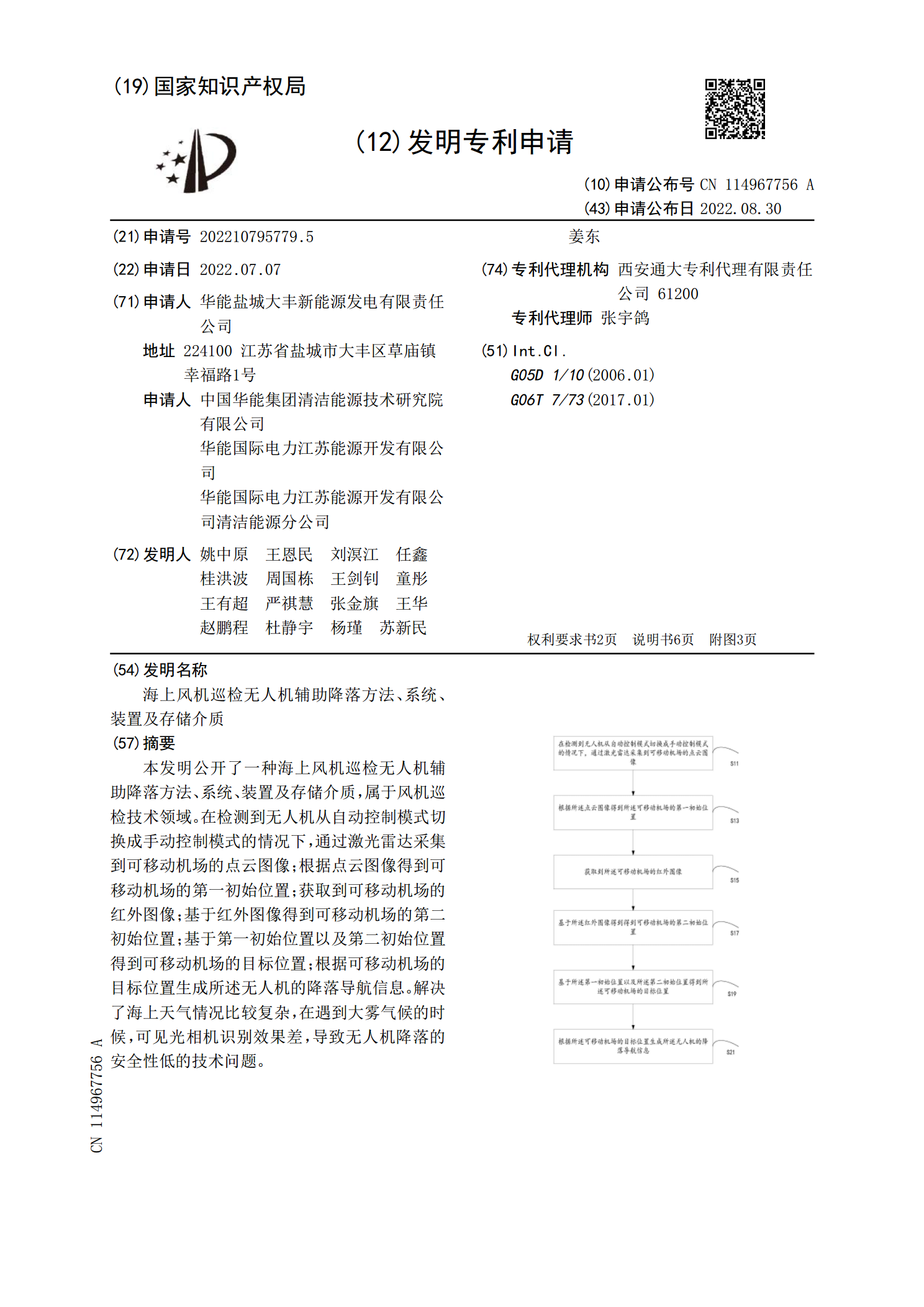
本发明公开了一种海上风机巡检无人机辅助降落方法、系统、装置及存储介质,属于风机巡检技术领域。在检测到无人机从自动控制模式切换成手动控制模式的情况下,通过激光雷达采集到可移动机场的点云图像;根据点云图像得到可移动机场的第一初始位置;获取到可移动机场的红外图像;基于红外图像得到可移动机场的第二初始位置;基于第一初始位置以及第二初始位置得到可移动机场的目标位置;根据可移动机场的目标位置生成所述无人机的降落导航信息。解决了海上天气情况比较复杂,在遇到大雾气候的时候,可见光相机识别效果差,导致无人机降落的安全性低的