
无人机定位降落方法、装置、存储介质以及电子设备.pdf

一只****呀9


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机定位降落方法、装置、存储介质以及电子设备.pdf
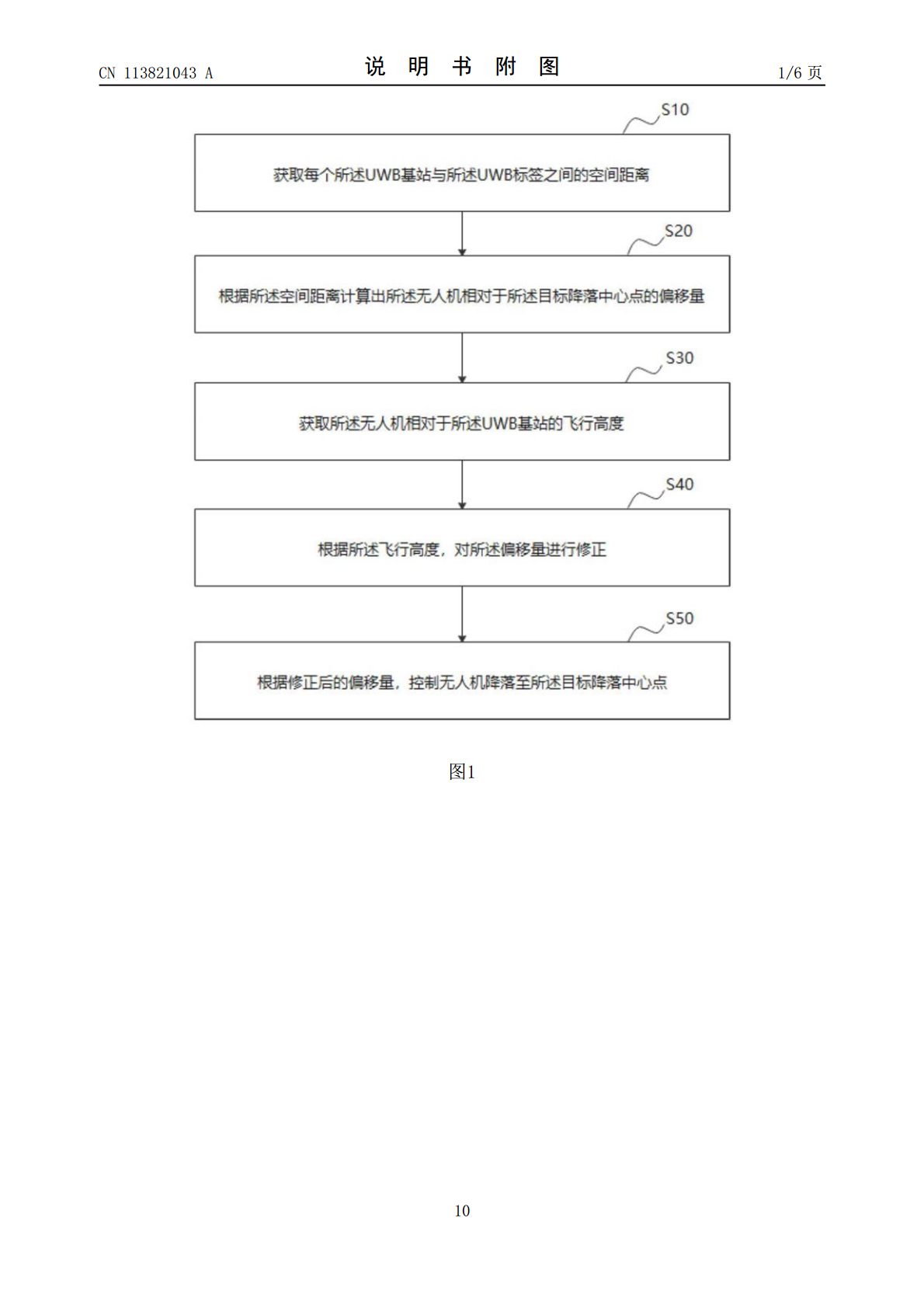
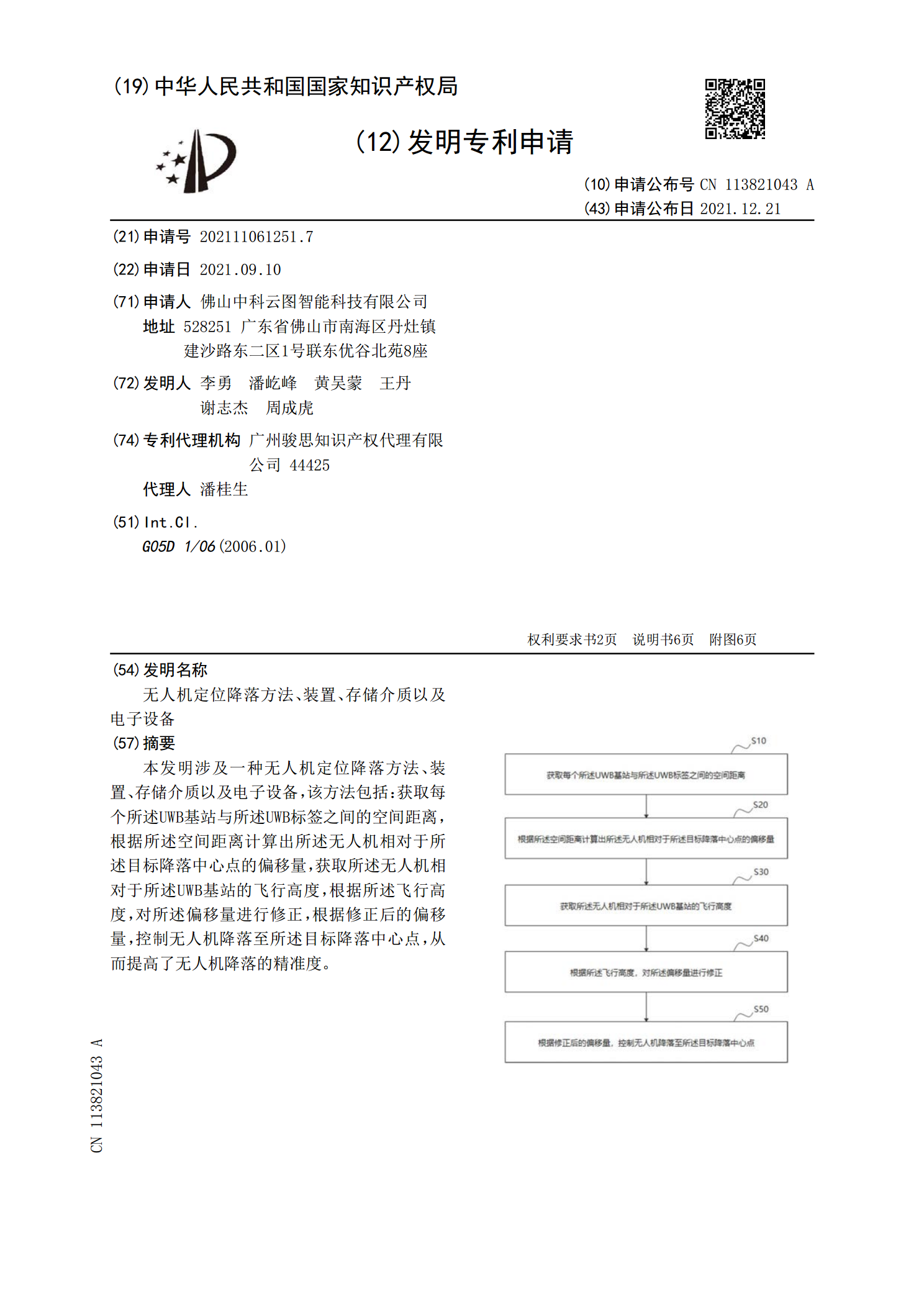
本发明涉及一种无人机定位降落方法、装置、存储介质以及电子设备,该方法包括:获取每个所述UWB基站与所述UWB标签之间的空间距离,根据所述空间距离计算出所述无人机相对于所述目标降落中心点的偏移量,获取所述无人机相对于所述UWB基站的飞行高度,根据所述飞行高度,对所述偏移量进行修正,根据修正后的偏移量,控制无人机降落至所述目标降落中心点,从而提高了无人机降落的精准度。

故障定位方法、装置、电子设备以及存储介质.pdf
本公开公开了故障定位方法、装置、电子设备、存储介质以及程序产品,涉及计算机技术领域,尤其涉及大数据技术领域。具体实现方案为:响应于针对目标服务的报警信息,获取目标服务的服务日志,其中,目标服务包括多个子服务;提取服务日志中的目标信息,其中,目标信息为与报警信息相关联的信息;以及针对目标信息,利用目标服务的拓扑结构,确定故障定位信息,其中,拓扑结构包括分别表征多个子服务的多个子服务结点以及多个子服务结点之间的连接关系。
对象定位方法、装置、电子设备以及存储介质.pdf
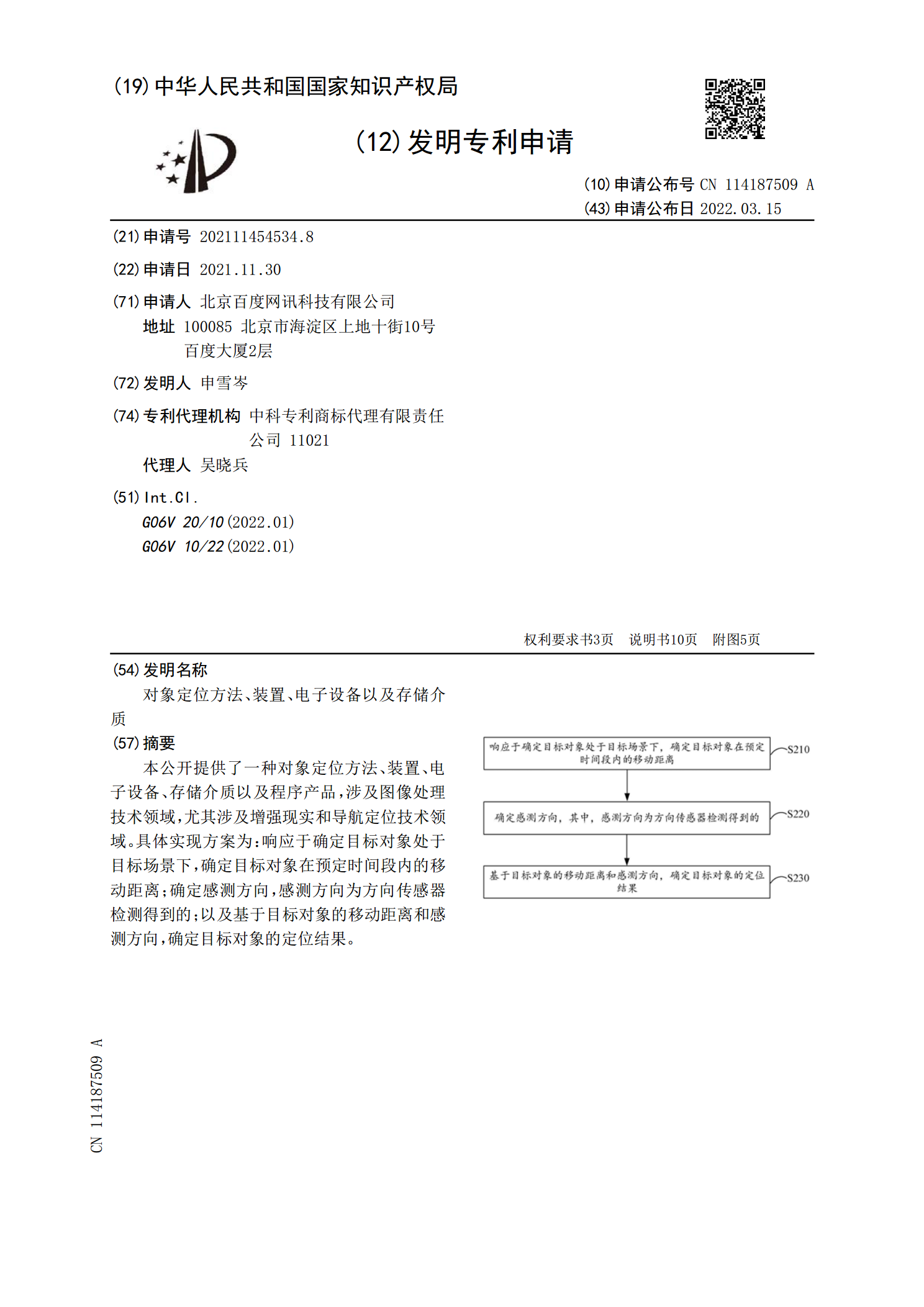
本公开提供了一种对象定位方法、装置、电子设备、存储介质以及程序产品,涉及图像处理技术领域,尤其涉及增强现实和导航定位技术领域。具体实现方案为:响应于确定目标对象处于目标场景下,确定目标对象在预定时间段内的移动距离;确定感测方向,感测方向为方向传感器检测得到的;以及基于目标对象的移动距离和感测方向,确定目标对象的定位结果。
证件定位方法、装置、电子设备以及可读存储介质.pdf
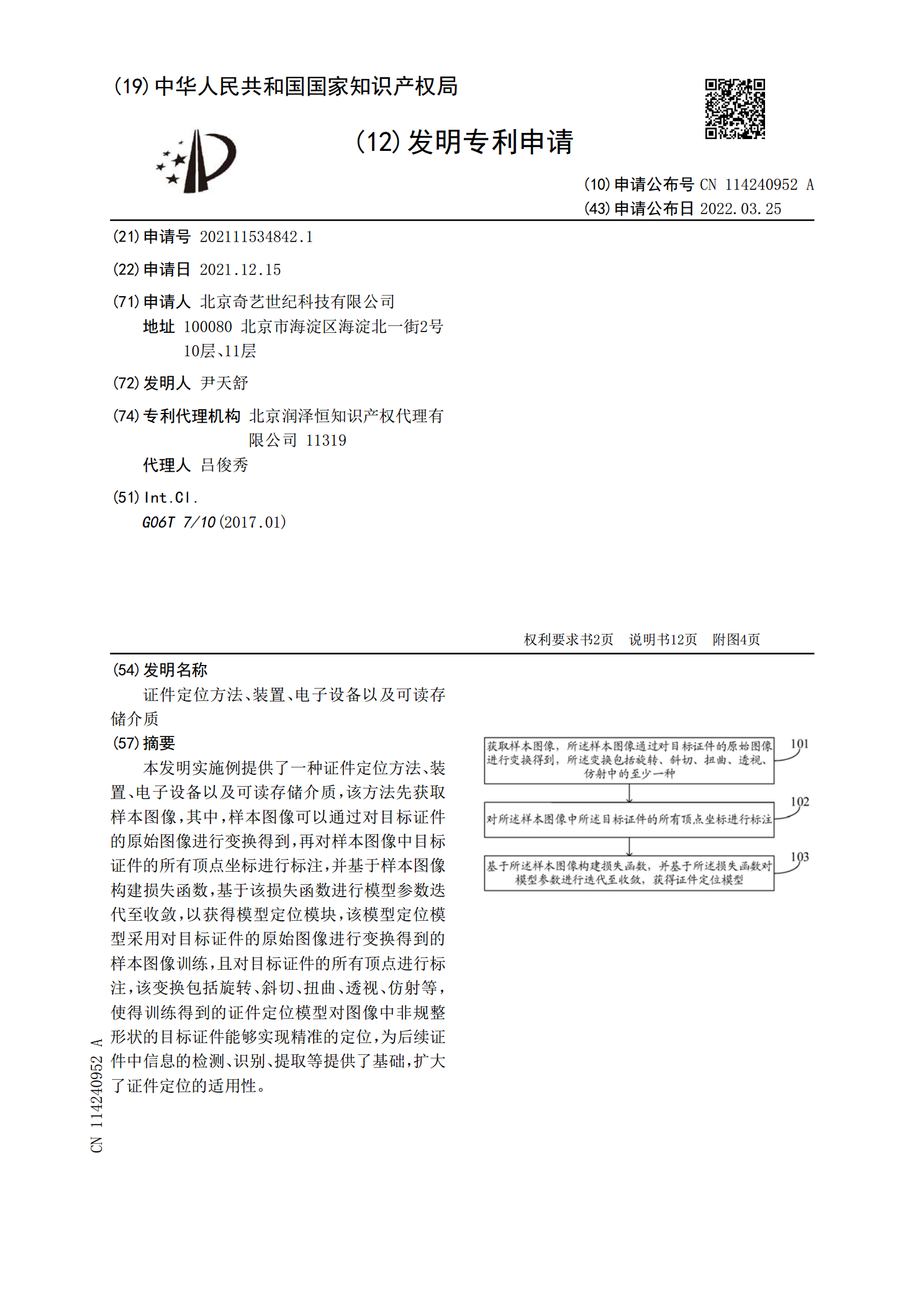
本发明实施例提供了一种证件定位方法、装置、电子设备以及可读存储介质,该方法先获取样本图像,其中,样本图像可以通过对目标证件的原始图像进行变换得到,再对样本图像中目标证件的所有顶点坐标进行标注,并基于样本图像构建损失函数,基于该损失函数进行模型参数迭代至收敛,以获得模型定位模块,该模型定位模型采用对目标证件的原始图像进行变换得到的样本图像训练,且对目标证件的所有顶点进行标注,该变换包括旋转、斜切、扭曲、透视、仿射等,使得训练得到的证件定位模型对图像中非规整形状的目标证件能够实现精准的定位,为后续证件中信息的
在线无人机直播方法、装置、存储介质以及电子设备.pdf
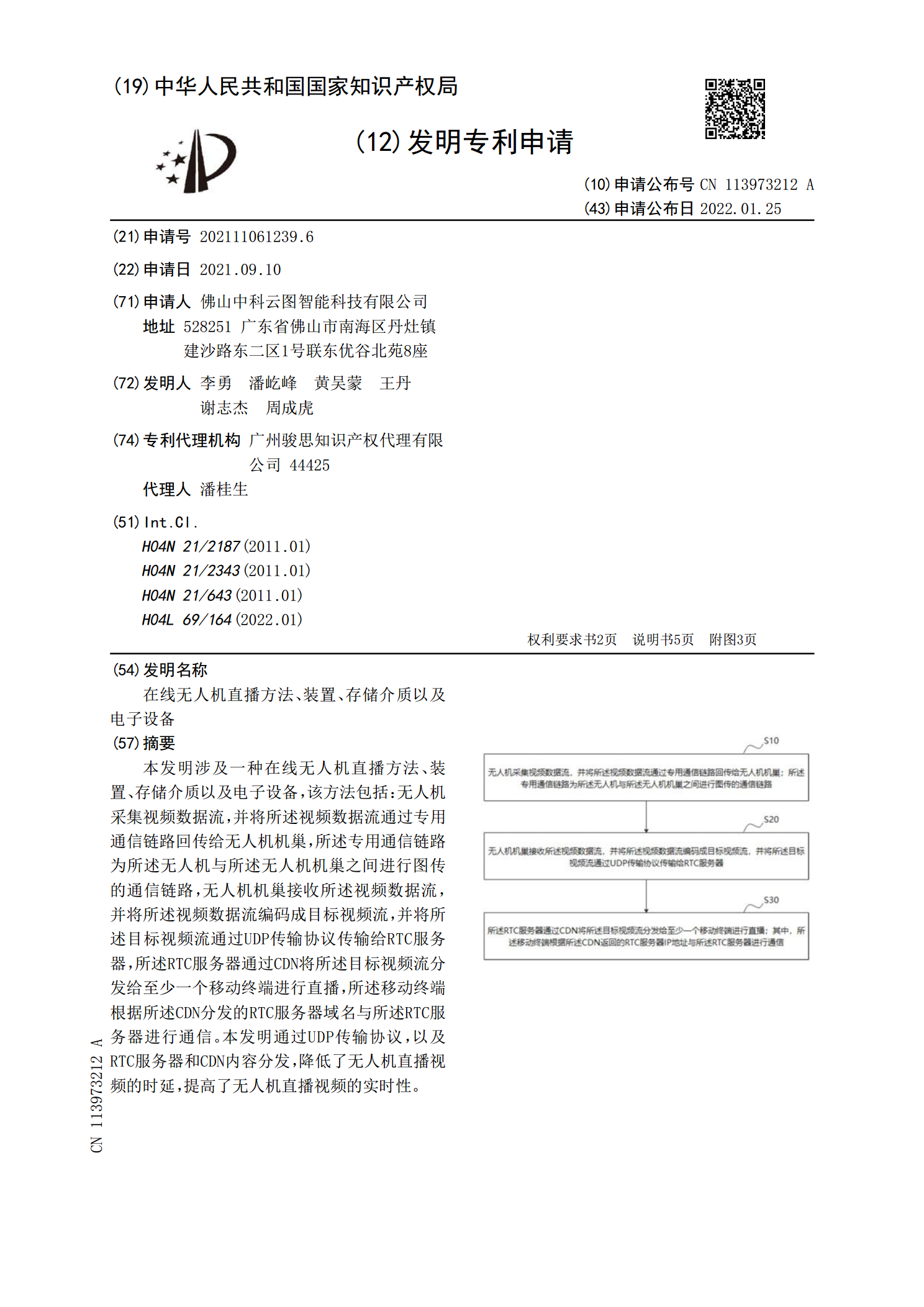
本发明涉及一种在线无人机直播方法、装置、存储介质以及电子设备,该方法包括:无人机采集视频数据流,并将所述视频数据流通过专用通信链路回传给无人机机巢,所述专用通信链路为所述无人机与所述无人机机巢之间进行图传的通信链路,无人机机巢接收所述视频数据流,并将所述视频数据流编码成目标视频流,并将所述目标视频流通过UDP传输协议传输给RTC服务器,所述RTC服务器通过CDN将所述目标视频流分发给至少一个移动终端进行直播,所述移动终端根据所述CDN分发的RTC服务器域名与所述RTC服务器进行通信。本发明通过UDP传输协