
扫地机器人及其控制方法、装置、设备和存储介质.pdf

秀美****甜v


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
扫地机器人及其控制方法、装置、设备和存储介质.pdf
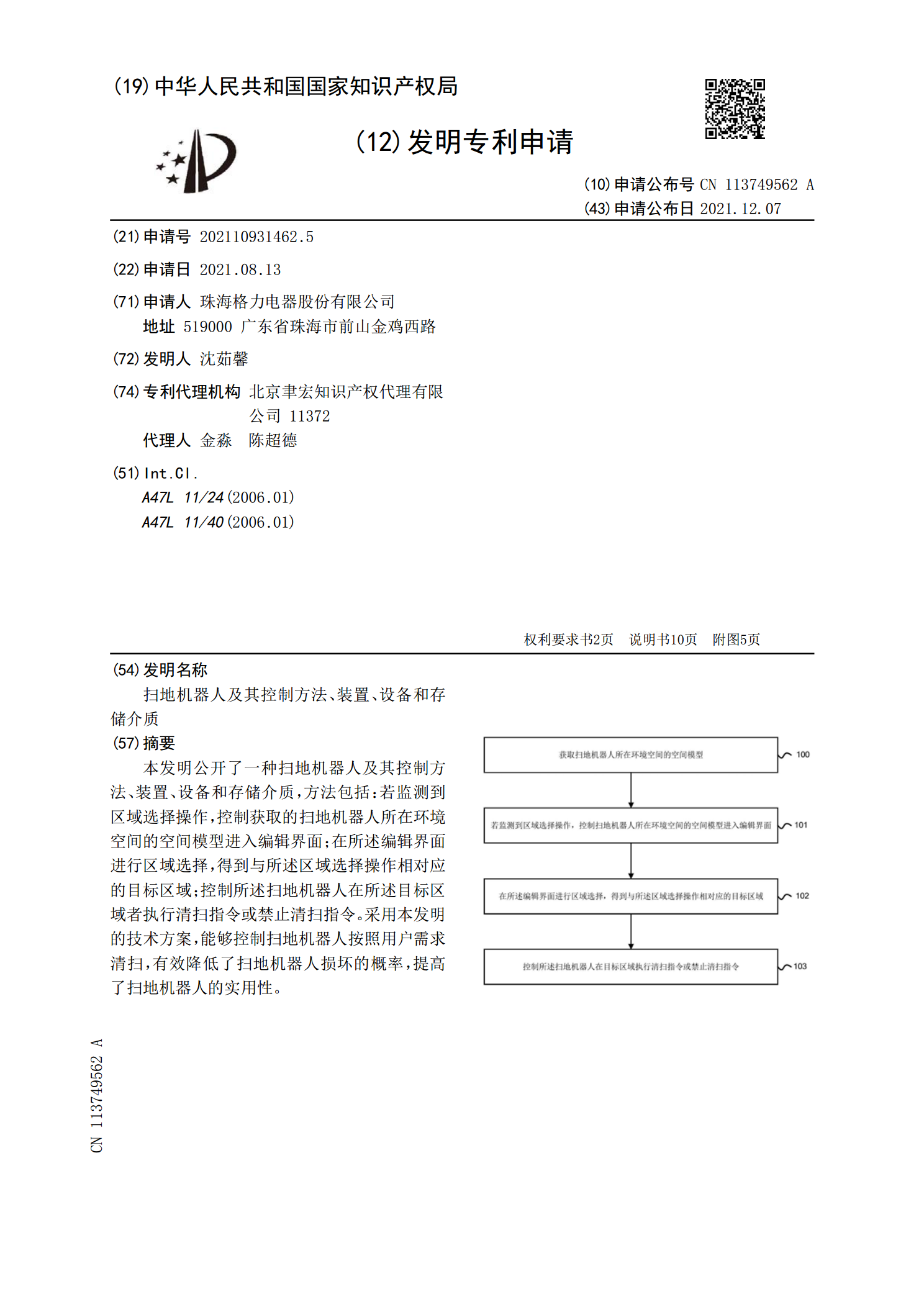
本发明公开了一种扫地机器人及其控制方法、装置、设备和存储介质,方法包括:若监测到区域选择操作,控制获取的扫地机器人所在环境空间的空间模型进入编辑界面;在所述编辑界面进行区域选择,得到与所述区域选择操作相对应的目标区域;控制所述扫地机器人在所述目标区域者执行清扫指令或禁止清扫指令。采用本发明的技术方案,能够控制扫地机器人按照用户需求清扫,有效降低了扫地机器人损坏的概率,提高了扫地机器人的实用性。

机器人及其控制方法、装置和存储介质.pdf
本申请公开了一种机器人及其控制方法。其中,该机器人包括:主体部;该机器人还包括:第一音频输出装置和第二音频输出装置,所述第一音频输出装置和所述第二音频输出装置设置于所述主体部上的不同区域;设置于主体部上的交互对象定位装置,用于定位机器人的交互对象;控制装置,用于根据交互对象定位装置的定位结果,分别对第一音频输出装置和第二音频输出装置的音频输出进行控制。该机器人使用多个音频输出装置输出音频,从而可以使得交互对象能够准确并清楚地听到机器人“说话”。
扫地机器人及其障碍物感知方法、控制装置和存储介质.pdf
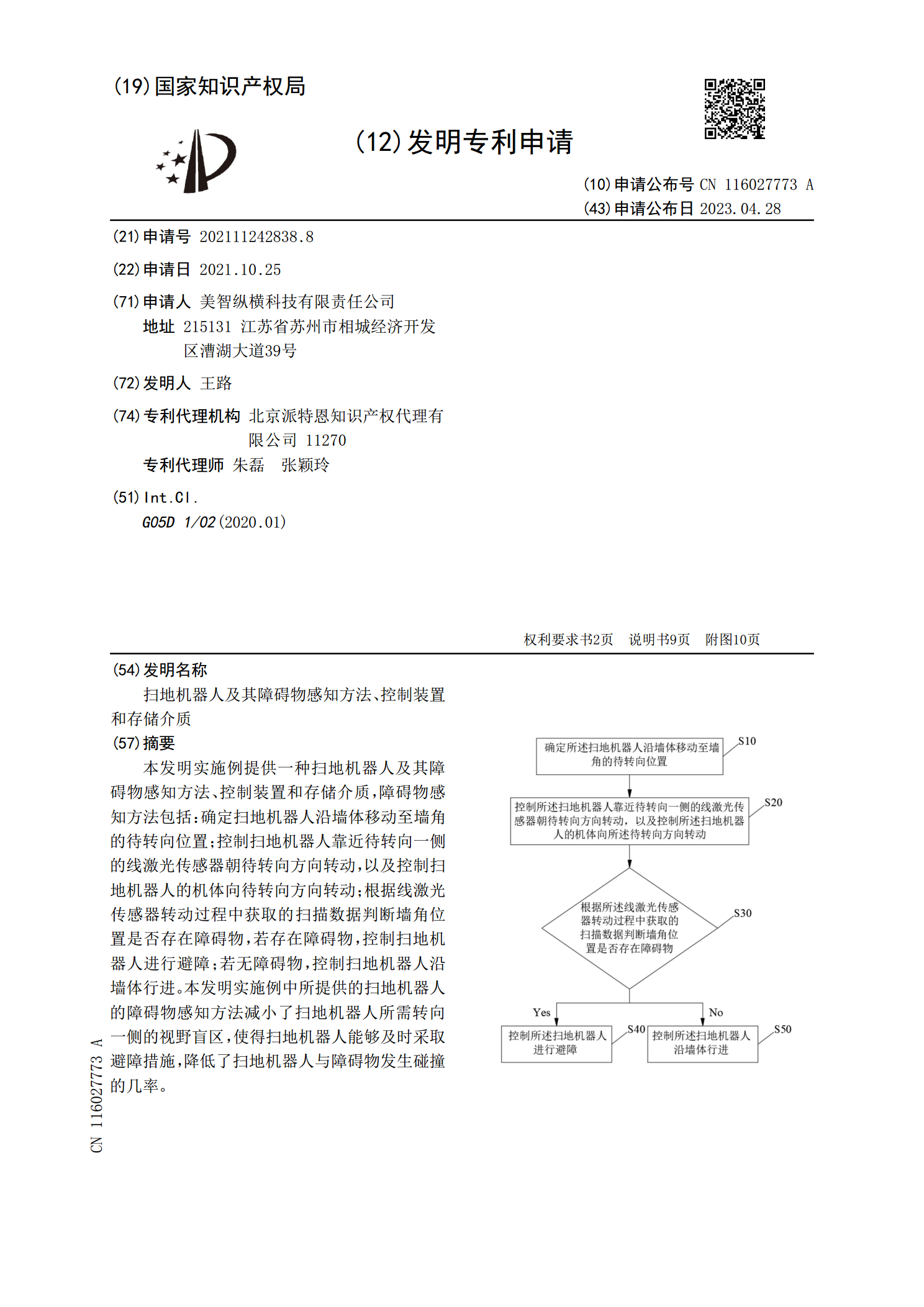
本发明实施例提供一种扫地机器人及其障碍物感知方法、控制装置和存储介质,障碍物感知方法包括:确定扫地机器人沿墙体移动至墙角的待转向位置;控制扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动,以及控制扫地机器人的机体向待转向方向转动;根据线激光传感器转动过程中获取的扫描数据判断墙角位置是否存在障碍物,若存在障碍物,控制扫地机器人进行避障;若无障碍物,控制扫地机器人沿墙体行进。本发明实施例中所提供的扫地机器人的障碍物感知方法减小了扫地机器人所需转向一侧的视野盲区,使得扫地机器人能够及时采取避障措施,降低了

搬运机器人的控制方法、装置、设备和存储介质.pdf
本申请提出一种搬运机器人的控制方法、装置、设备和存储介质,当搬运机器人叉取目标物时,行走叉与抬升叉面面接触,抬升叉用于将目标物抬升至预设高度;其还包括用于识别目标物的TOF相机。控制方法包括:在搬运机器人运动至第一目标位置的预设范围的情况下,控制TOF相机识别目标物,以得到目标物的位姿,第一目标位置为搬运机器人叉取目标物的位置;根据目标物的位姿以及搬运机器人的位姿,确定目标物和搬运机器人之间的相对位姿;根据相对位姿动态调整运动轮子的速度矢量;根据速度矢量控制运动轮子,使搬运机器人运动至第一目标位置。本申请
机器人控制方法、装置、智能设备和存储介质.pdf
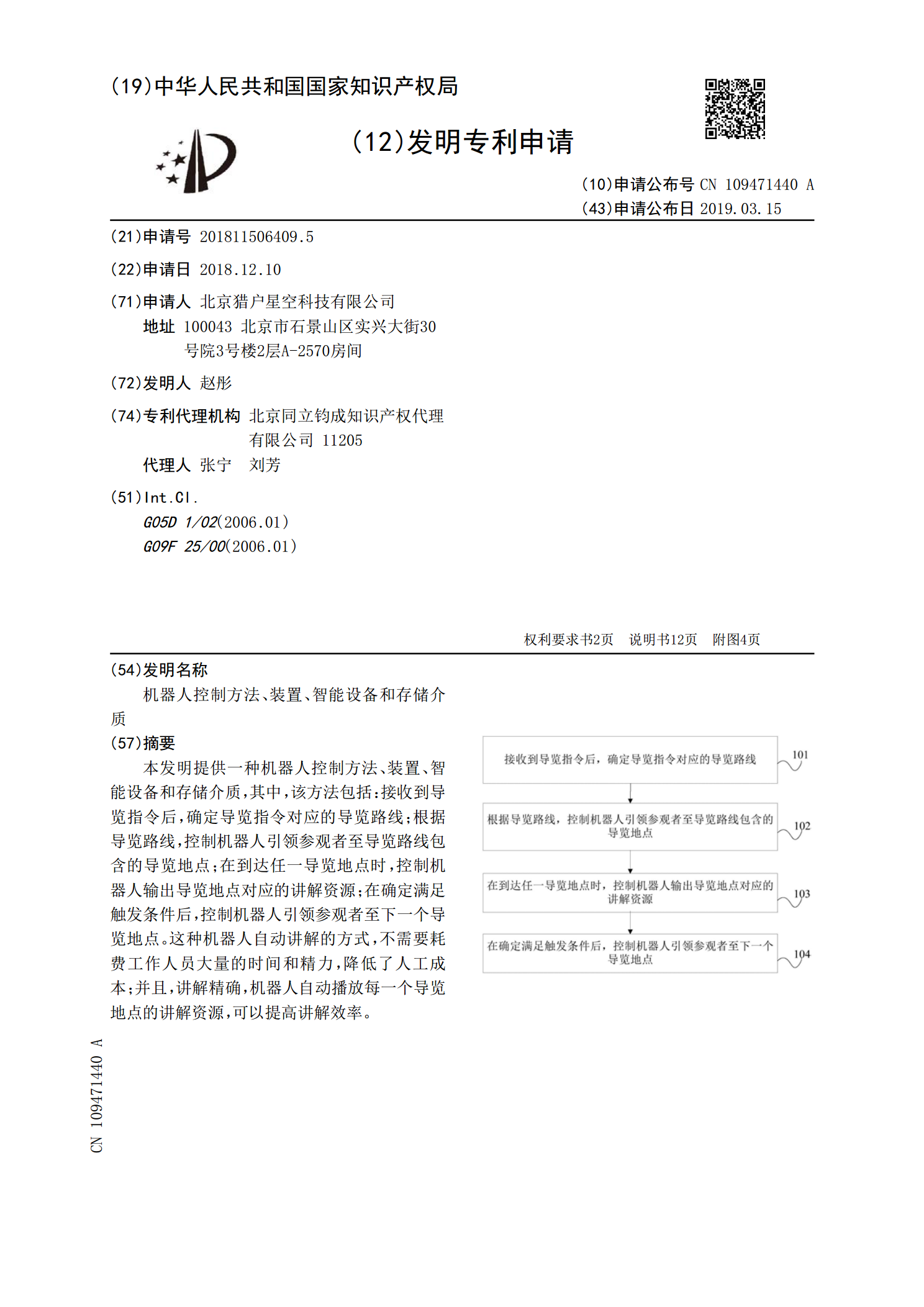
本发明提供一种机器人控制方法、装置、智能设备和存储介质,其中,该方法包括:接收到导览指令后,确定导览指令对应的导览路线;根据导览路线,控制机器人引领参观者至导览路线包含的导览地点;在到达任一导览地点时,控制机器人输出导览地点对应的讲解资源;在确定满足触发条件后,控制机器人引领参观者至下一个导览地点。这种机器人自动讲解的方式,不需要耗费工作人员大量的时间和精力,降低了人工成本;并且,讲解精确,机器人自动播放每一个导览地点的讲解资源,可以提高讲解效率。