
雷达目标数据关联的方法、装置、设备和存储介质.pdf

阳炎****找我


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
雷达目标数据关联的方法、装置、设备和存储介质.pdf
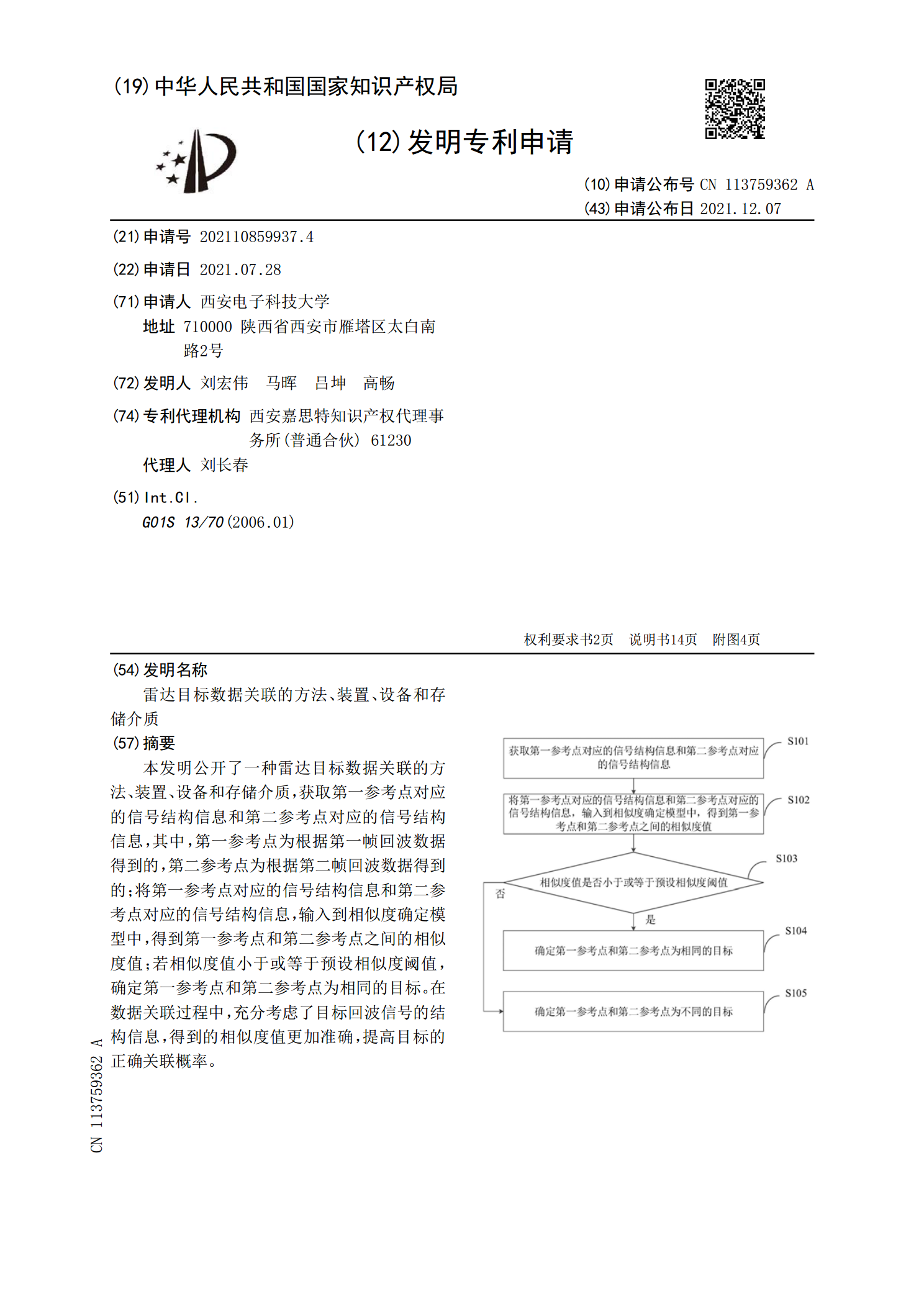
本发明公开了一种雷达目标数据关联的方法、装置、设备和存储介质,获取第一参考点对应的信号结构信息和第二参考点对应的信号结构信息,其中,第一参考点为根据第一帧回波数据得到的,第二参考点为根据第二帧回波数据得到的;将第一参考点对应的信号结构信息和第二参考点对应的信号结构信息,输入到相似度确定模型中,得到第一参考点和第二参考点之间的相似度值;若相似度值小于或等于预设相似度阈值,确定第一参考点和第二参考点为相同的目标。在数据关联过程中,充分考虑了目标回波信号的结构信息,得到的相似度值更加准确,提高目标的正确关联概率
多雷达数据融合方法、装置、存储介质和设备.pdf
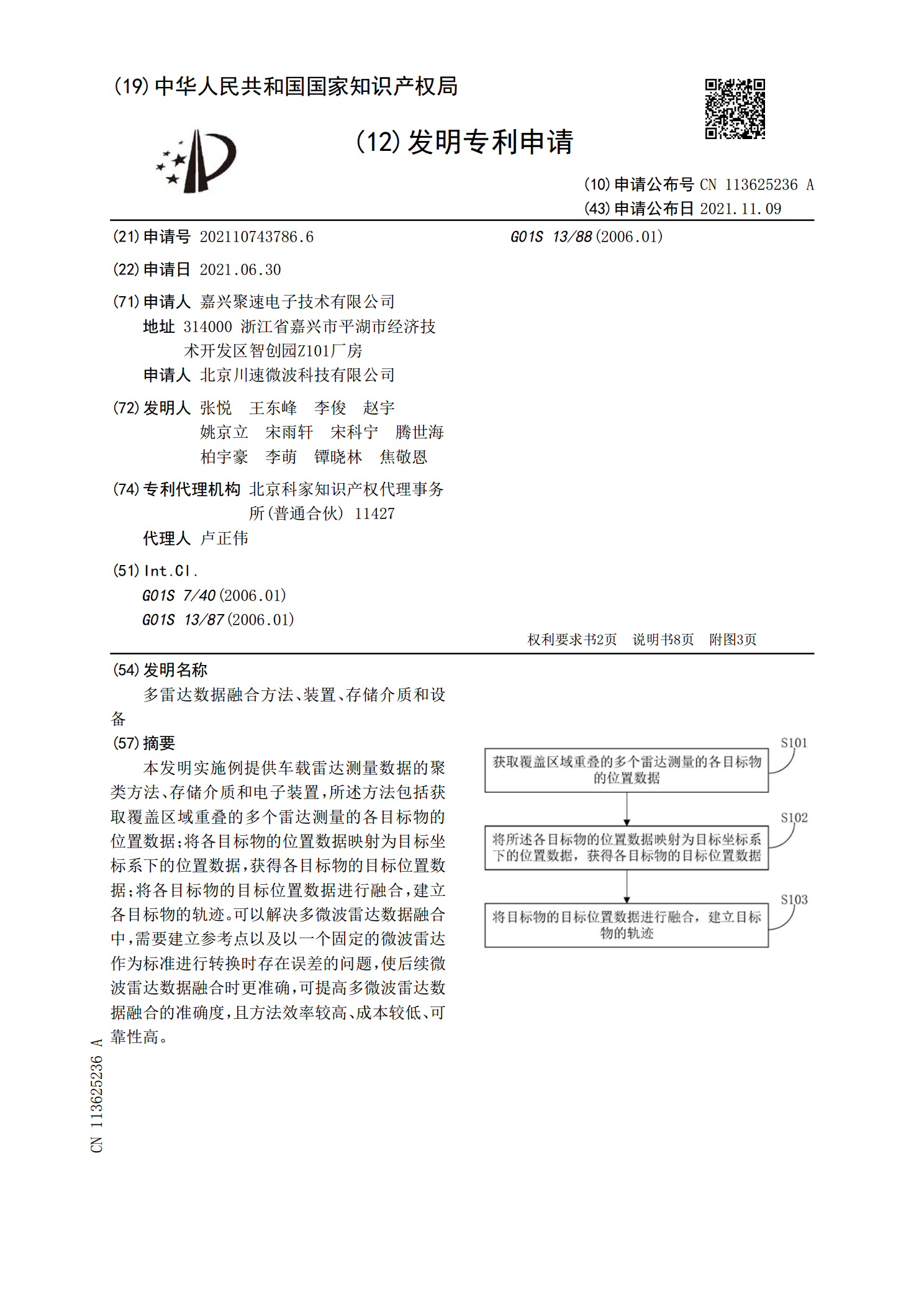
本发明实施例提供车载雷达测量数据的聚类方法、存储介质和电子装置,所述方法包括获取覆盖区域重叠的多个雷达测量的各目标物的位置数据;将各目标物的位置数据映射为目标坐标系下的位置数据,获得各目标物的目标位置数据;将各目标物的目标位置数据进行融合,建立各目标物的轨迹。可以解决多微波雷达数据融合中,需要建立参考点以及以一个固定的微波雷达作为标准进行转换时存在误差的问题,使后续微波雷达数据融合时更准确,可提高多微波雷达数据融合的准确度,且方法效率较高、成本较低、可靠性高。

目标运动状态判断方法、装置、雷达设备和存储介质.pdf
本申请涉及一种目标运动状态判断方法、装置、雷达设备和存储介质,其中,该目标运动状态判断方法包括:获取雷达回波信号,基于雷达回波信号获取目标区域图像,目标区域图像包括距离‑多普勒图像和多个对应的数据点;将目标区域图像中的数据点分类为目标点和噪底;对包含目标点的区域进行图像膨胀,并计算膨胀数据区域面积;基于数据点的速度值获取静止点,基于膨胀数据区域面积、目标点的速度值及目标点周围预设范围内是否存在静止点,判断目标区域图像对应目标的运动状态。通过本申请,解决了现有技术无法在满足雷达允许存储量的条件下精确识别局部
基于雷达的目标物体成像的方法、装置、设备和存储介质.pdf
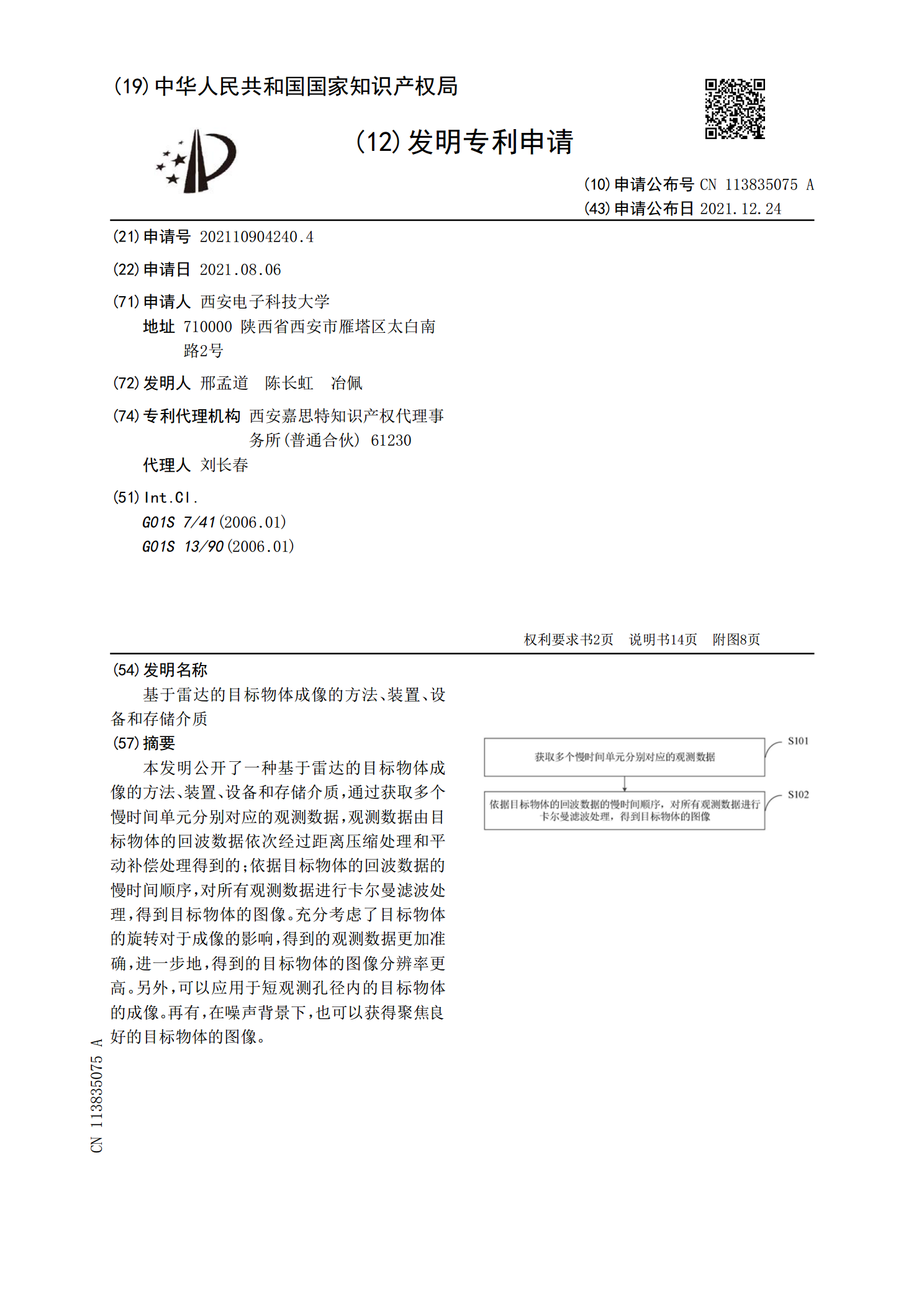
本发明公开了一种基于雷达的目标物体成像的方法、装置、设备和存储介质,通过获取多个慢时间单元分别对应的观测数据,观测数据由目标物体的回波数据依次经过距离压缩处理和平动补偿处理得到的;依据目标物体的回波数据的慢时间顺序,对所有观测数据进行卡尔曼滤波处理,得到目标物体的图像。充分考虑了目标物体的旋转对于成像的影响,得到的观测数据更加准确,进一步地,得到的目标物体的图像分辨率更高。另外,可以应用于短观测孔径内的目标物体的成像。再有,在噪声背景下,也可以获得聚焦良好的目标物体的图像。
应用雷达检测低速目标的方法、装置、存储介质和设备.pdf
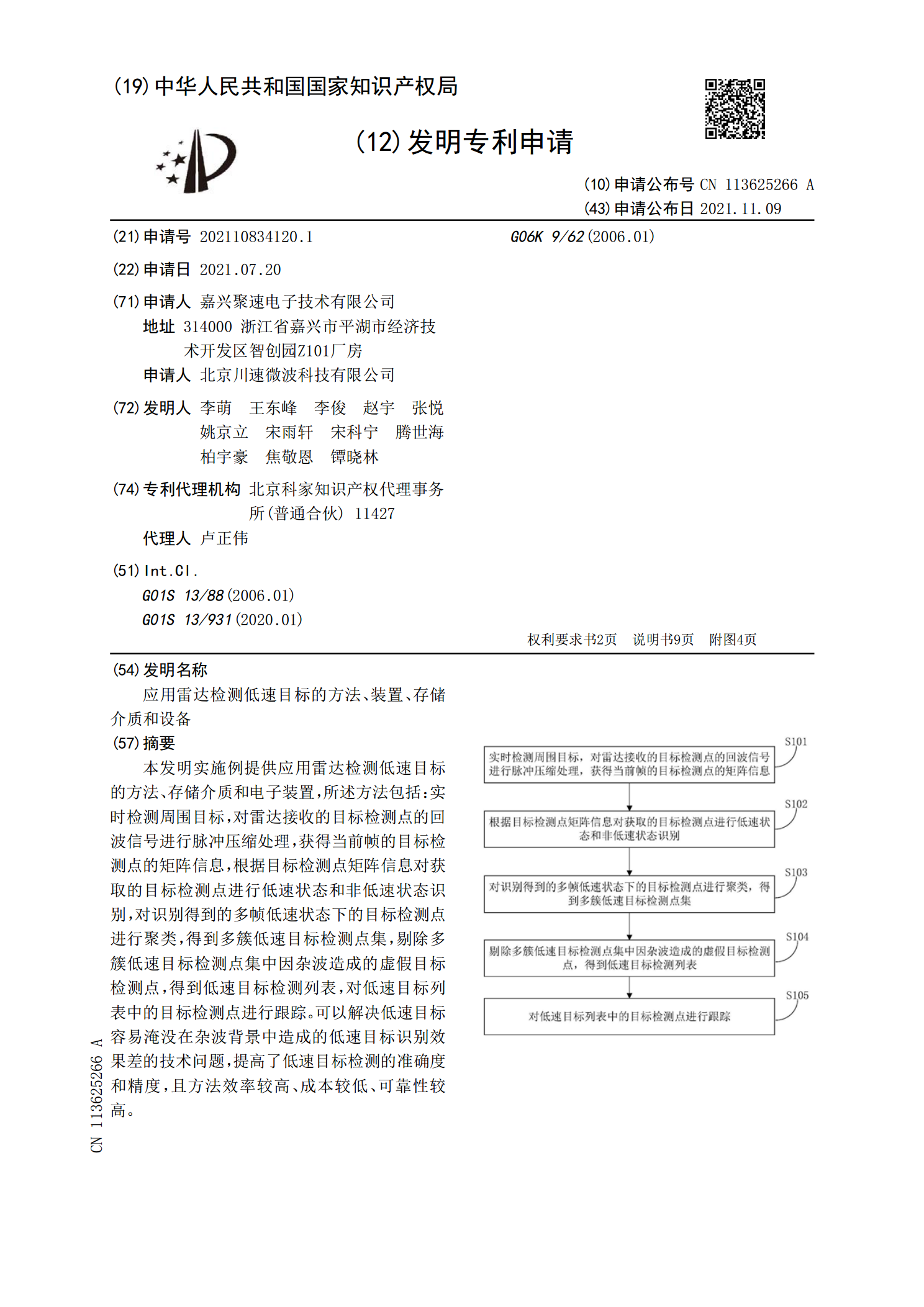
本发明实施例提供应用雷达检测低速目标的方法、存储介质和电子装置,所述方法包括:实时检测周围目标,对雷达接收的目标检测点的回波信号进行脉冲压缩处理,获得当前帧的目标检测点的矩阵信息,根据目标检测点矩阵信息对获取的目标检测点进行低速状态和非低速状态识别,对识别得到的多帧低速状态下的目标检测点进行聚类,得到多簇低速目标检测点集,剔除多簇低速目标检测点集中因杂波造成的虚假目标检测点,得到低速目标检测列表,对低速目标列表中的目标检测点进行跟踪。可以解决低速目标容易淹没在杂波背景中造成的低速目标识别效果差的技术问题,