
振动马达的控制方法和控制装置、电子设备和存储介质.pdf

春波****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

振动马达的控制方法和控制装置、电子设备和存储介质.pdf
本申请公开了一种振动马达的控制方法和控制装置、电子设备和存储介质,属于电子设备技术领域。振动马达的控制方法,包括:在接收到电子设备运行目标应用程序时生成的起振波形的情况下,确定目标应用程序的第一向量,其中,第一向量为目标应用程序的Embedding向量,起振波形为驱动电子设备的振动马达工作的波形;确定电子设备的第二向量,和振动马达的第三向量,其中,第二向量为电子设备的硬件参数向量,第三向量为振动马达的硬件参数向量;合并第一向量、第二向量和第三向量,得到目标向量;根据起振波形和目标向量,确定起振波形对应的目

马达振动方法及装置、存储介质及电子设备.pdf
本发明提供了一种马达振动方法及装置、存储介质及电子设备,该方法包括:当接收到触发指令时,获取目标音频文件;确定所述目标音频文件中的各个振动特征点;依据每个所述振动特征点对应的振动能量值,确定每个所述振动特征点对应的振动等级;播放所述目标音频文件,并在播放至所述目标音频文件中的每个振动特征点时,依据该振动特征点对应的振动等级驱动马达进行振动。应用本发明提供的马达振动方法,使马达能够随着目标音频文件中的振动特征点,产生与振动特征点对应的振动等级的振动,满足用户对于射击振动的反馈需求,提升射击类游戏的乐趣。
控制方法、装置、电子设备和存储介质.pdf
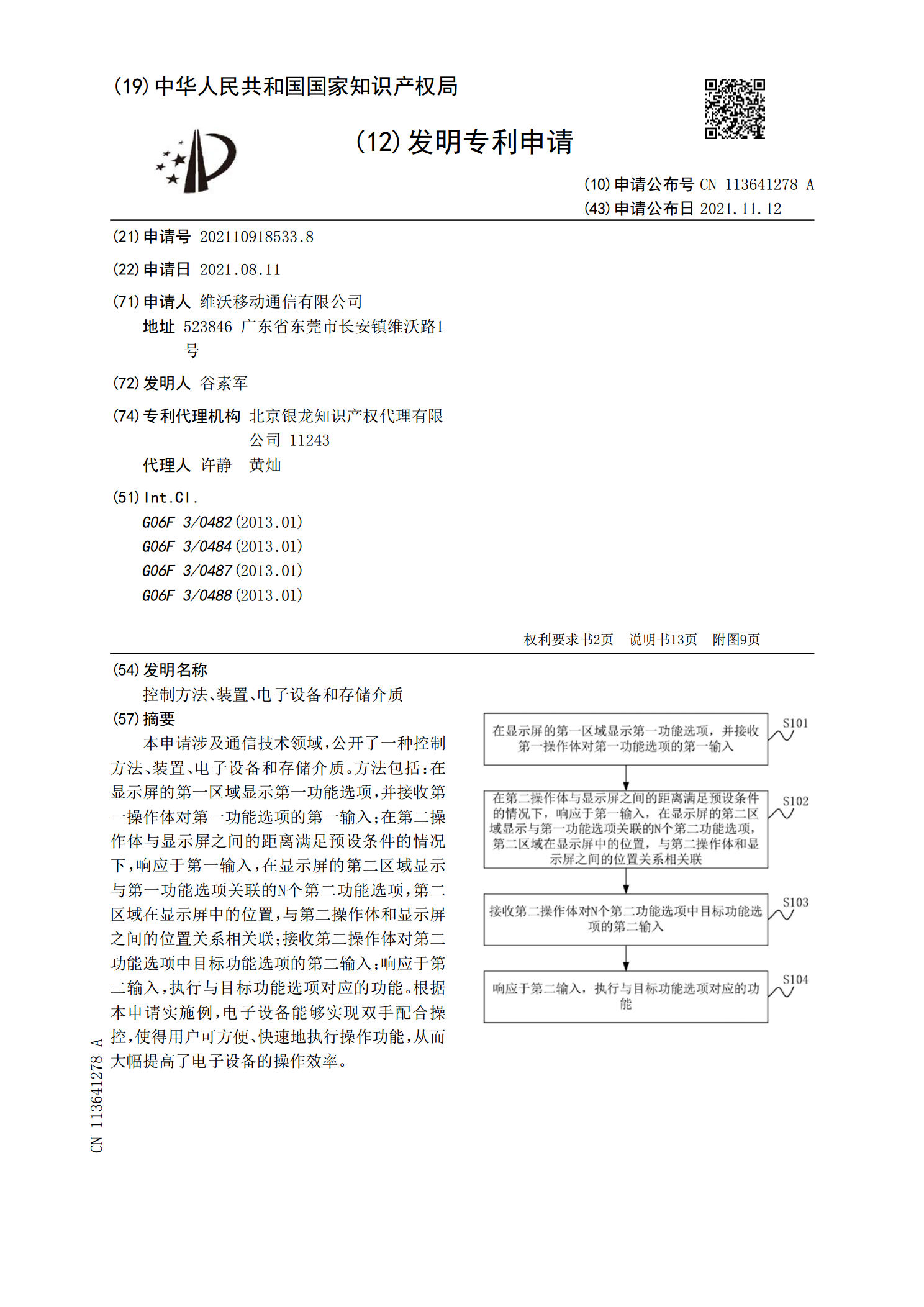
本申请涉及通信技术领域,公开了一种控制方法、装置、电子设备和存储介质。方法包括:在显示屏的第一区域显示第一功能选项,并接收第一操作体对第一功能选项的第一输入;在第二操作体与显示屏之间的距离满足预设条件的情况下,响应于第一输入,在显示屏的第二区域显示与第一功能选项关联的N个第二功能选项,第二区域在显示屏中的位置,与第二操作体和显示屏之间的位置关系相关联;接收第二操作体对第二功能选项中目标功能选项的第二输入;响应于第二输入,执行与目标功能选项对应的功能。根据本申请实施例,电子设备能够实现双手配合操控,使得用户

马达震感控制方法及装置、电子设备、存储介质.pdf
本公开是关于一种马达震感控制方法及装置、电子设备、存储介质。该方法包括:获取马达的目标震动强度;根据基于所述目标震动强度从多个候选输入波形中选取一个震动强度与所述目标震动强度匹配的候选输入波形;所述多个候选输入波形具有不同的起振周期,将所述候选输入波形作为初始输入波形;基于所述候选输入波形驱动所述马达震动。这样,本实施例中通过选取输入波形可以调整输入波形的起振周期,达到控制震动强度和震动周期的效果,有利于提高调整震动强度的准确度。

电梯控制方法、装置、电子设备和存储介质.pdf
本申请提供了一种电梯控制方法、装置、电子设备和存储介质,属于语音识别和图像识别技术领域。该方法包括:确定目标乘梯对象,目标乘梯对象为进入电梯后没有指示楼层的乘梯对象;获取目标乘梯对象的生物特征信息;确定生物特征信息对应的第一楼层,第一楼层为目标乘梯对象期望前往的楼层;控制电梯指示第一楼层。这样,即使乘梯对象在进入电梯后忘记指示楼层,电梯也能够自动指示乘梯对象期望前往的楼层,从而提高了乘梯对象的乘梯效率。