
基于激光雷达的机载飞行避障辅助方法、装置及系统.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于激光雷达的机载飞行避障辅助方法、装置及系统.pdf
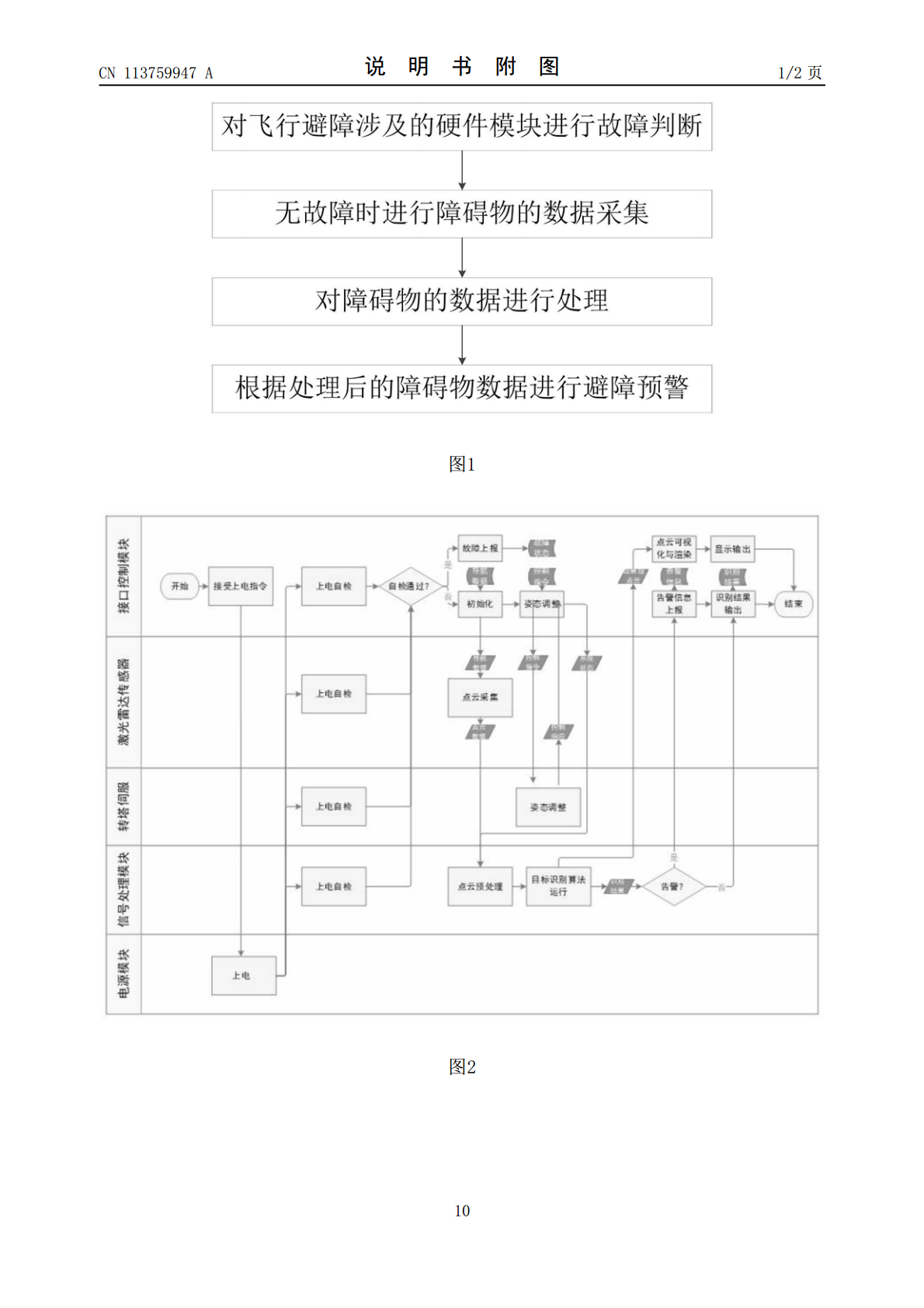
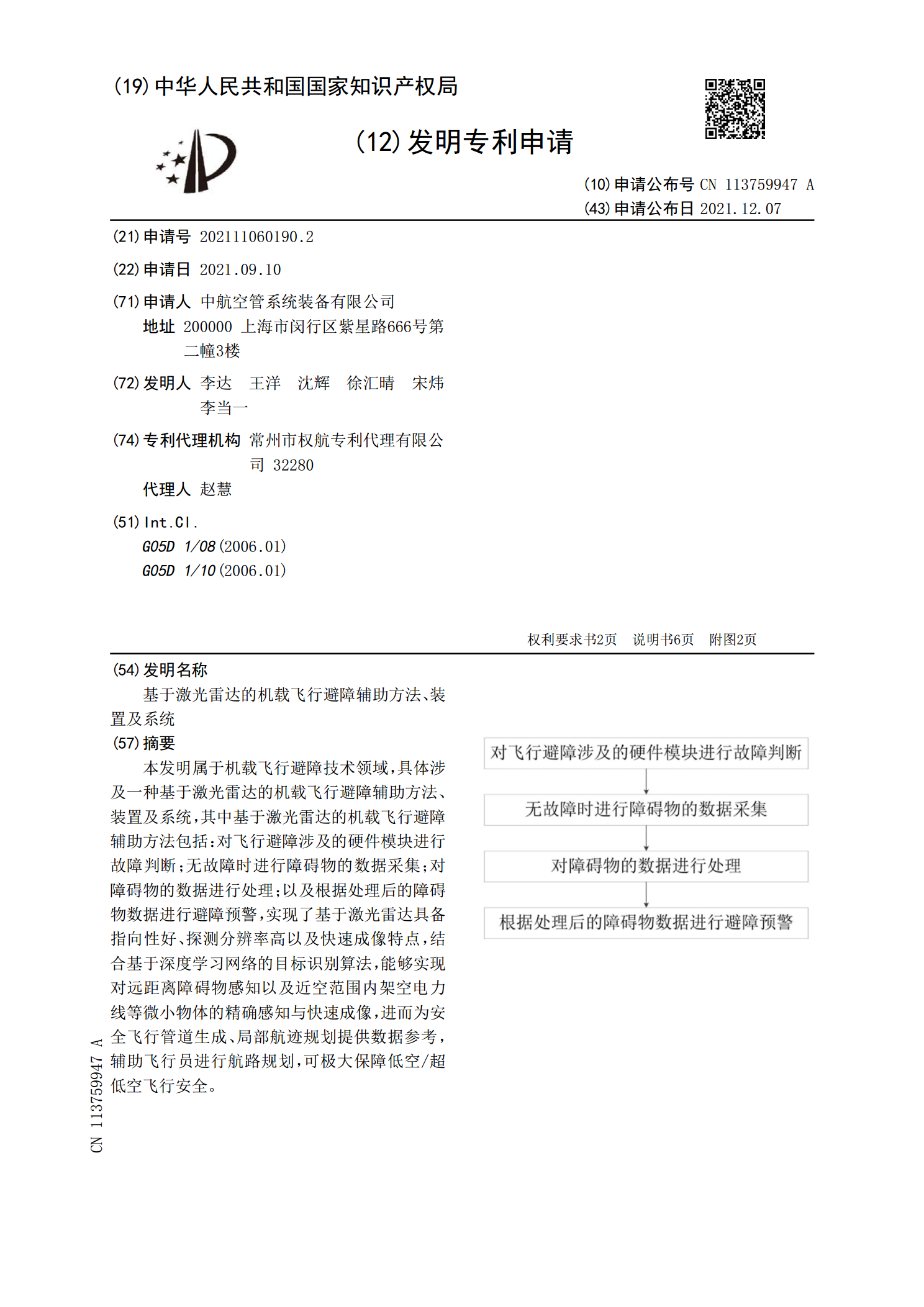
本发明属于机载飞行避障技术领域,具体涉及一种基于激光雷达的机载飞行避障辅助方法、装置及系统,其中基于激光雷达的机载飞行避障辅助方法包括:对飞行避障涉及的硬件模块进行故障判断;无故障时进行障碍物的数据采集;对障碍物的数据进行处理;以及根据处理后的障碍物数据进行避障预警,实现了基于激光雷达具备指向性好、探测分辨率高以及快速成像特点,结合基于深度学习网络的目标识别算法,能够实现对远距离障碍物感知以及近空范围内架空电力线等微小物体的精确感知与快速成像,进而为安全飞行管道生成、局部航迹规划提供数据参考,辅助飞行员进

基于激光雷达的多旋翼飞行器实时避障系统.docx
基于激光雷达的多旋翼飞行器实时避障系统概述:无人机的应用越来越普及,而无人机需要避免障碍物以避免危险。因此,激光雷达技术作为一种传感器被广泛应用于无人机的实时避障系统中。本文将介绍无人机避障系统的基本原理和激光雷达技术在其中的应用。一、无人机避障系统的原理无人机的避障系统的主要任务是在无人机飞行时检测并避免障碍物,以确保无人机航行的安全。无人机避障系统包括传感器、控制器和执行器。传感器用于检测周围环境的信息,控制器用于分析传感器信息并做出决策,执行器用于控制无人机的动作。避障系统的控制器主要有两种方法:一
一种飞行机器人避障装置及飞行机器人的避障方法.pdf
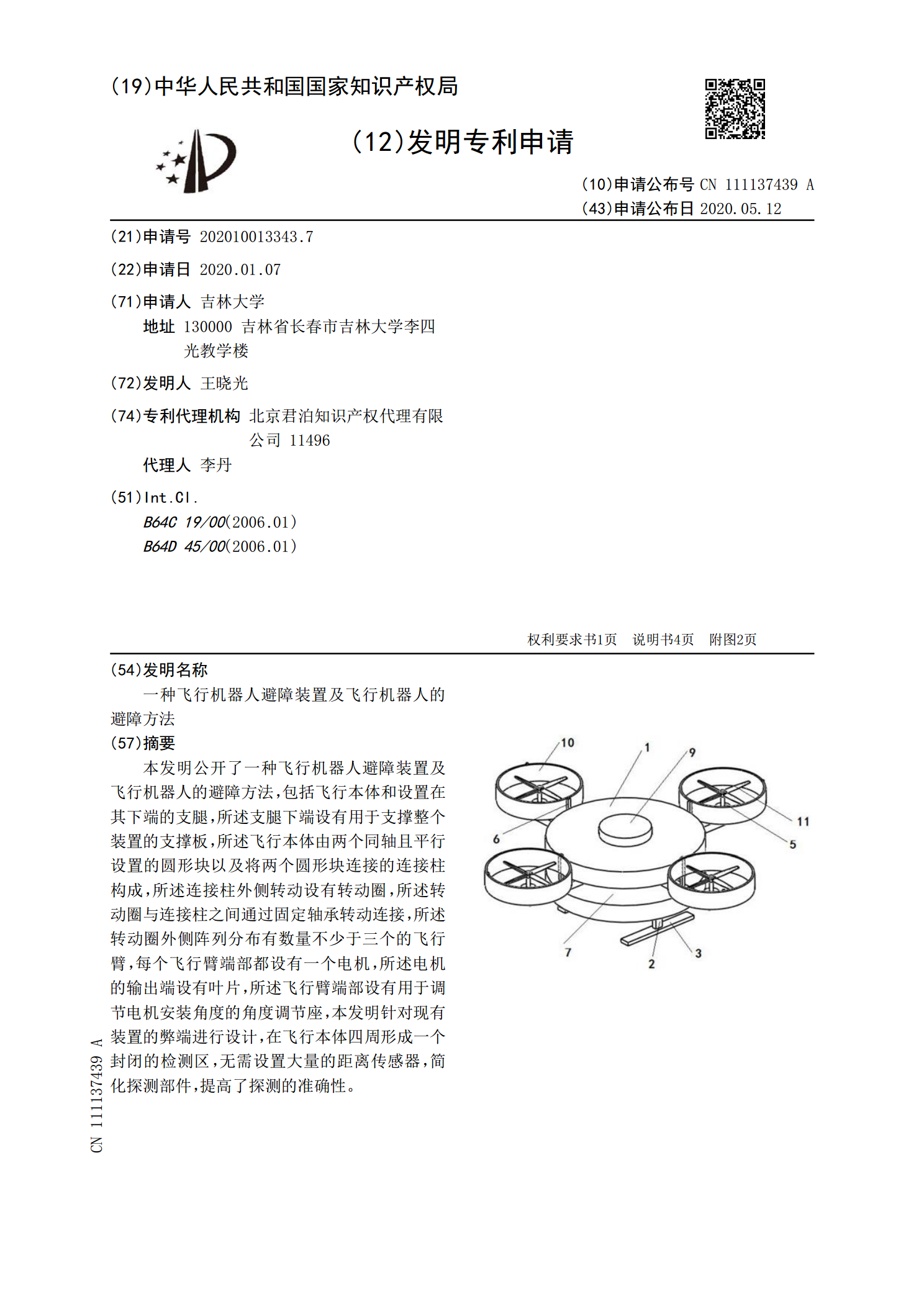
本发明公开了一种飞行机器人避障装置及飞行机器人的避障方法,包括飞行本体和设置在其下端的支腿,所述支腿下端设有用于支撑整个装置的支撑板,所述飞行本体由两个同轴且平行设置的圆形块以及将两个圆形块连接的连接柱构成,所述连接柱外侧转动设有转动圈,所述转动圈与连接柱之间通过固定轴承转动连接,所述转动圈外侧阵列分布有数量不少于三个的飞行臂,每个飞行臂端部都设有一个电机,所述电机的输出端设有叶片,所述飞行臂端部设有用于调节电机安装角度的角度调节座,本发明针对现有装置的弊端进行设计,在飞行本体四周形成一个封闭的检测区,无

一种辅助避障装置.pdf
本发明公开了一种辅助避障装置,包括第一安装架、定位机构、限位机构、压紧机构和移动机构,通过设置压紧块,当移动板在支撑块内活动至需要位置,开启第二气缸,第二气缸带动第二伸缩杆向下移动,进而带动压紧块向下移动,最终将第二安装架固定在压紧块与配合块之间,为第二安装架提供支撑力;通过设置第三安装板,第三安装板的一端通过螺栓固定安装有直线导轨,直线导轨上滑动连接滑块,当对滑块施加水平方向的力时,滑块受力沿直线导轨左右移动,同时滑块将力传递至移动板,进而带动移动板在工作台上水平移动,进而带动避障元器件在水平方向的移动
机械臂的避障方法及避障系统.pdf
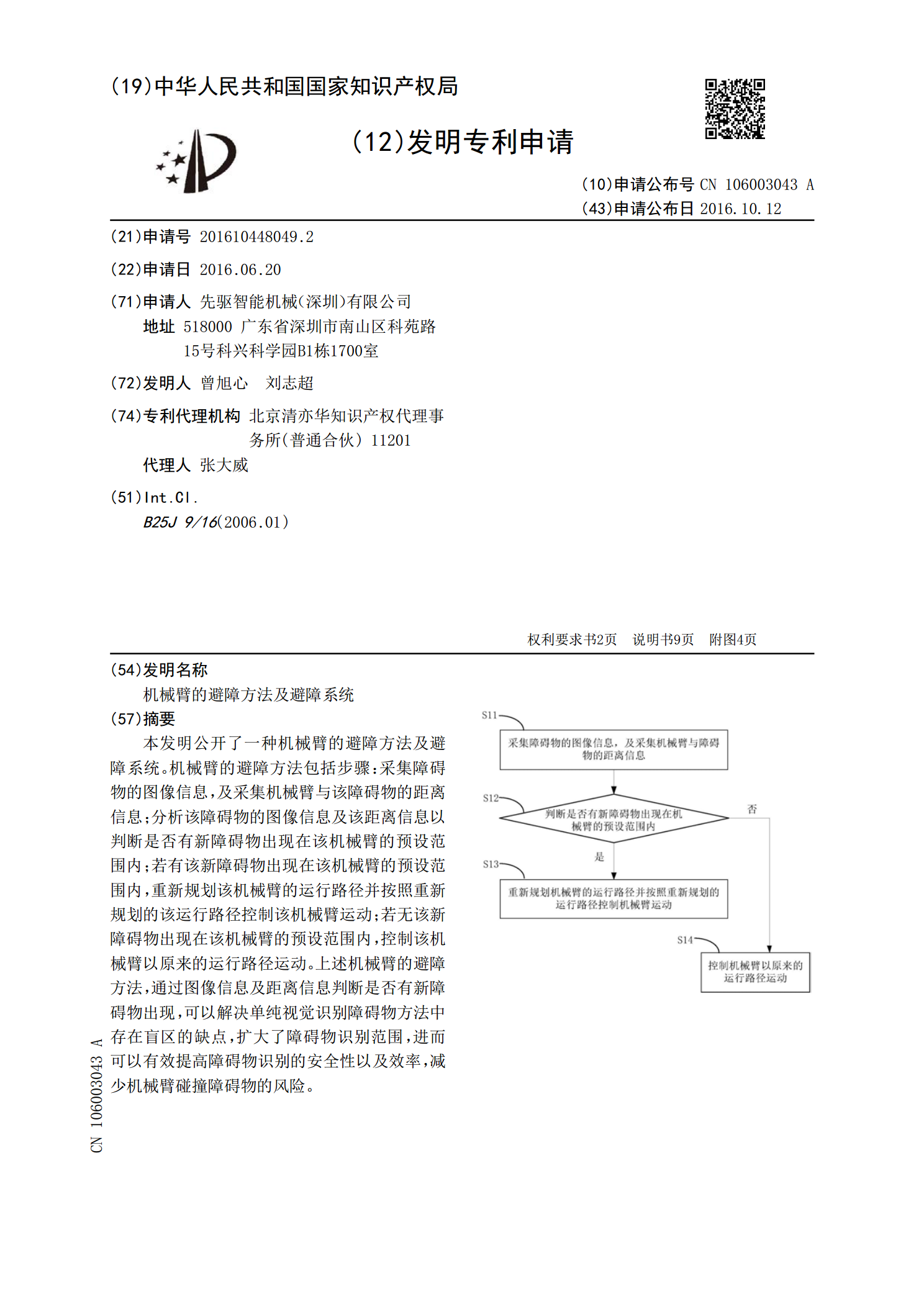
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点