
一种快速多点自动对焦方法、系统及其应用设备.pdf

黛娥****ak

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种快速多点自动对焦方法、系统及其应用设备.pdf
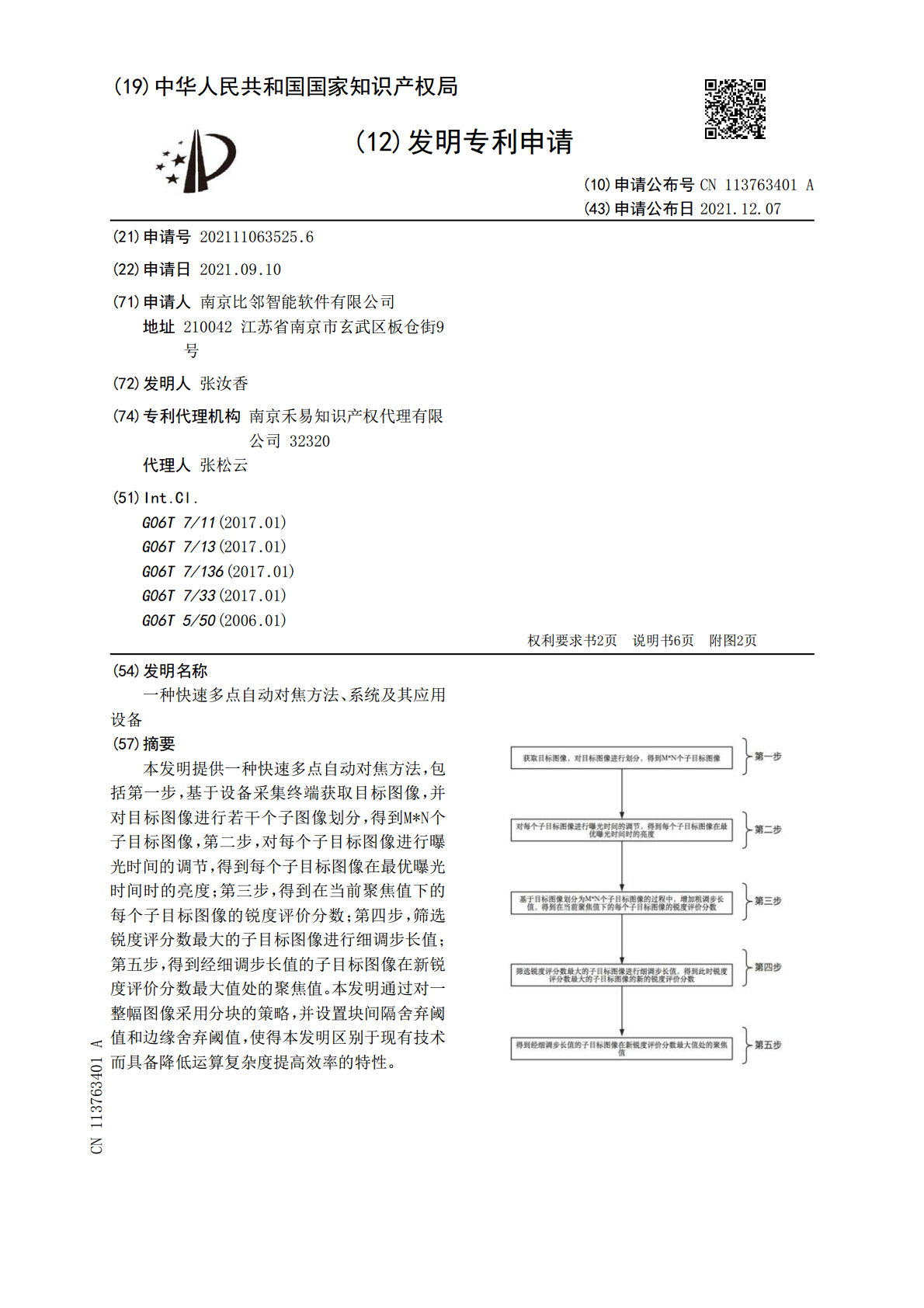
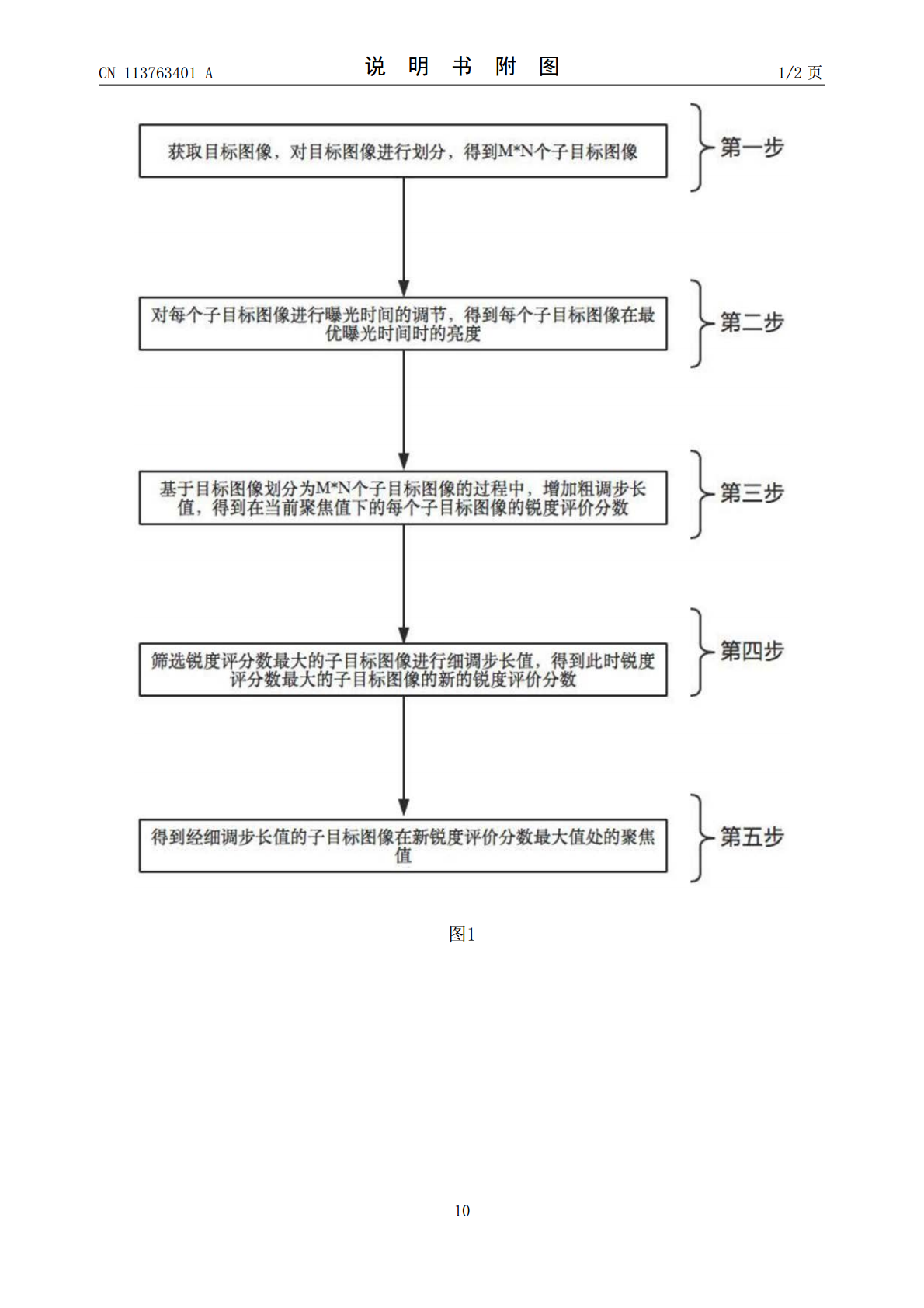
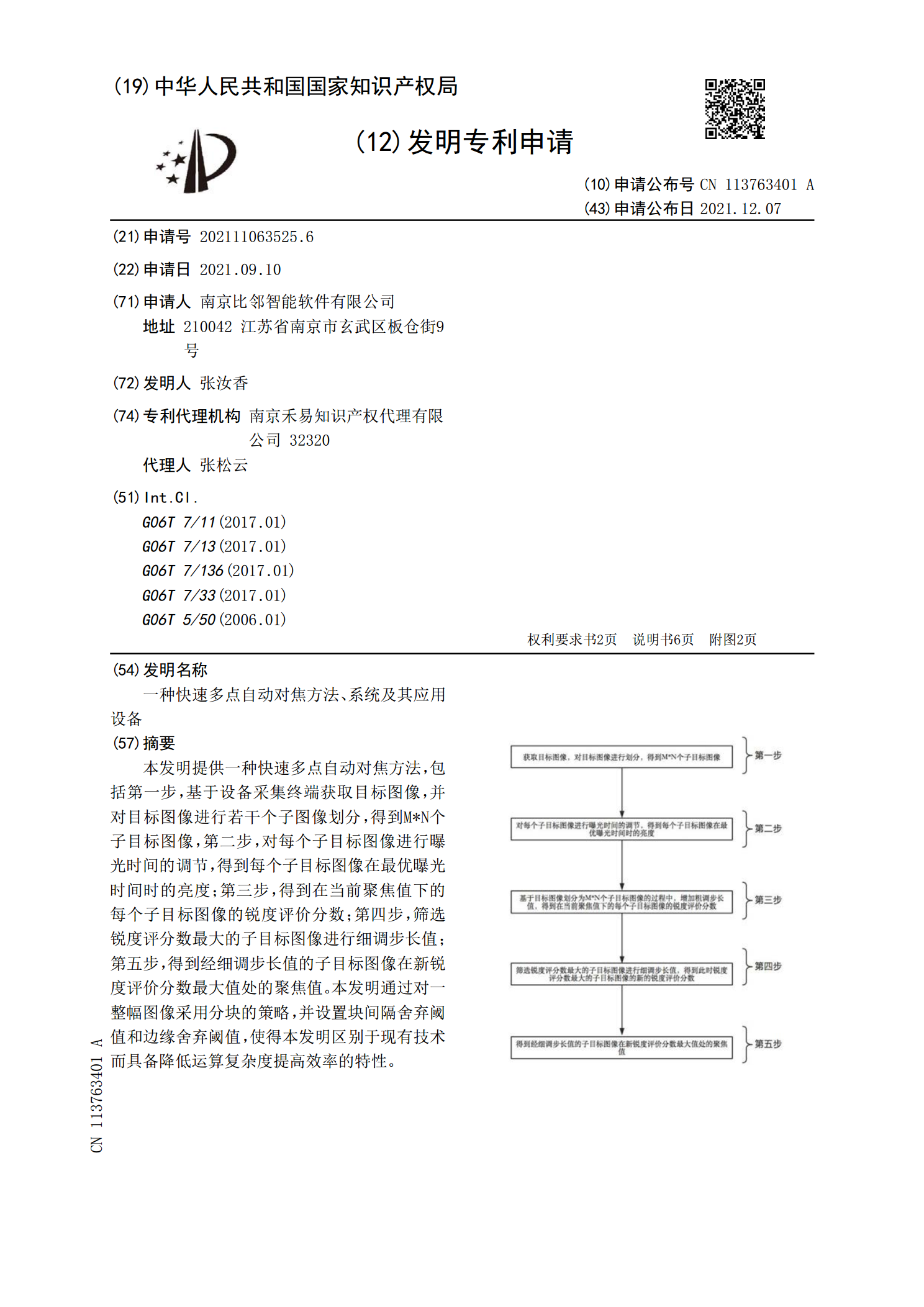
本发明提供一种快速多点自动对焦方法,包括第一步,基于设备采集终端获取目标图像,并对目标图像进行若干个子图像划分,得到M*N个子目标图像,第二步,对每个子目标图像进行曝光时间的调节,得到每个子目标图像在最优曝光时间时的亮度;第三步,得到在当前聚焦值下的每个子目标图像的锐度评价分数;第四步,筛选锐度评分数最大的子目标图像进行细调步长值;第五步,得到经细调步长值的子目标图像在新锐度评价分数最大值处的聚焦值。本发明通过对一整幅图像采用分块的策略,并设置块间隔舍弃阈值和边缘舍弃阈值,使得本发明区别于现有技术而具备降
基于强化学习的自动对焦方法、系统及其应用设备.pdf
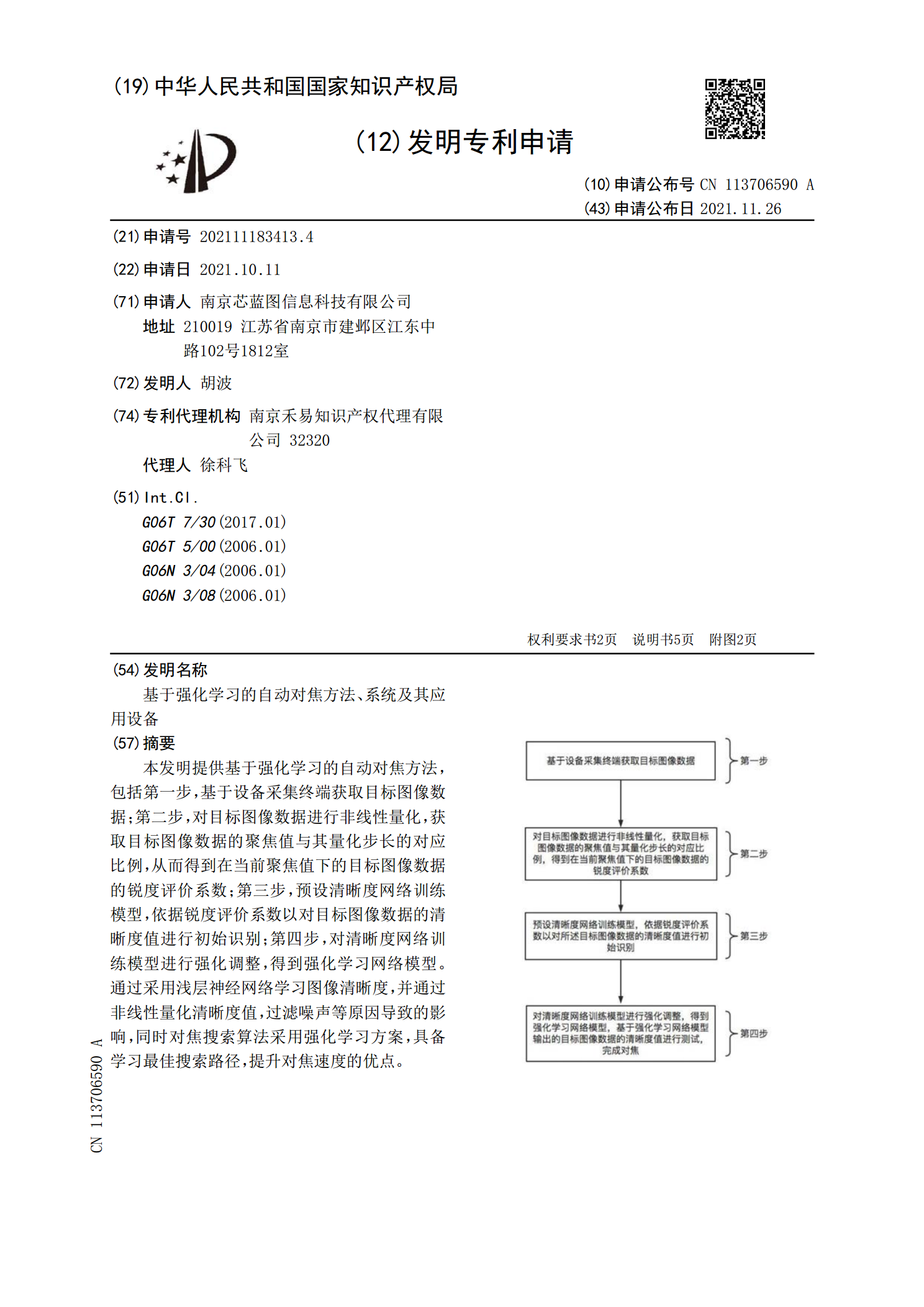
本发明提供基于强化学习的自动对焦方法,包括第一步,基于设备采集终端获取目标图像数据;第二步,对目标图像数据进行非线性量化,获取目标图像数据的聚焦值与其量化步长的对应比例,从而得到在当前聚焦值下的目标图像数据的锐度评价系数;第三步,预设清晰度网络训练模型,依据锐度评价系数以对目标图像数据的清晰度值进行初始识别;第四步,对清晰度网络训练模型进行强化调整,得到强化学习网络模型。通过采用浅层神经网络学习图像清晰度,并通过非线性量化清晰度值,过滤噪声等原因导致的影响,同时对焦搜索算法采用强化学习方案,具备学习最佳搜

一种摄像头系统自动对焦方法和自动对焦摄像头系统.pdf
本发明实施例公开了一种摄像头系统自动对焦方法和自动对焦摄像头系统。该自动对焦摄像头系统通过设置对焦控制模块、距离定位模块、自动对焦摄像头和驱动机构,可以在对焦控制模块的控制和驱动下,利用距离定位模块采集待测基板不同点位的距离值;利用自动对焦摄像头在预设对焦范围内对待测基板上不同点位进行自动对焦,并根据待测基板上除原点点位之外的非原点点位与原点点位的高度差,控制驱动机构对自动对焦摄像头的高度位置进行补偿调节;驱动自动对焦摄像头在预设对焦范围内对原点点位和非原点点位进行自动对焦。本发明解决了现有光学检测系统需
一种投影装置及其自动对焦方法.pdf
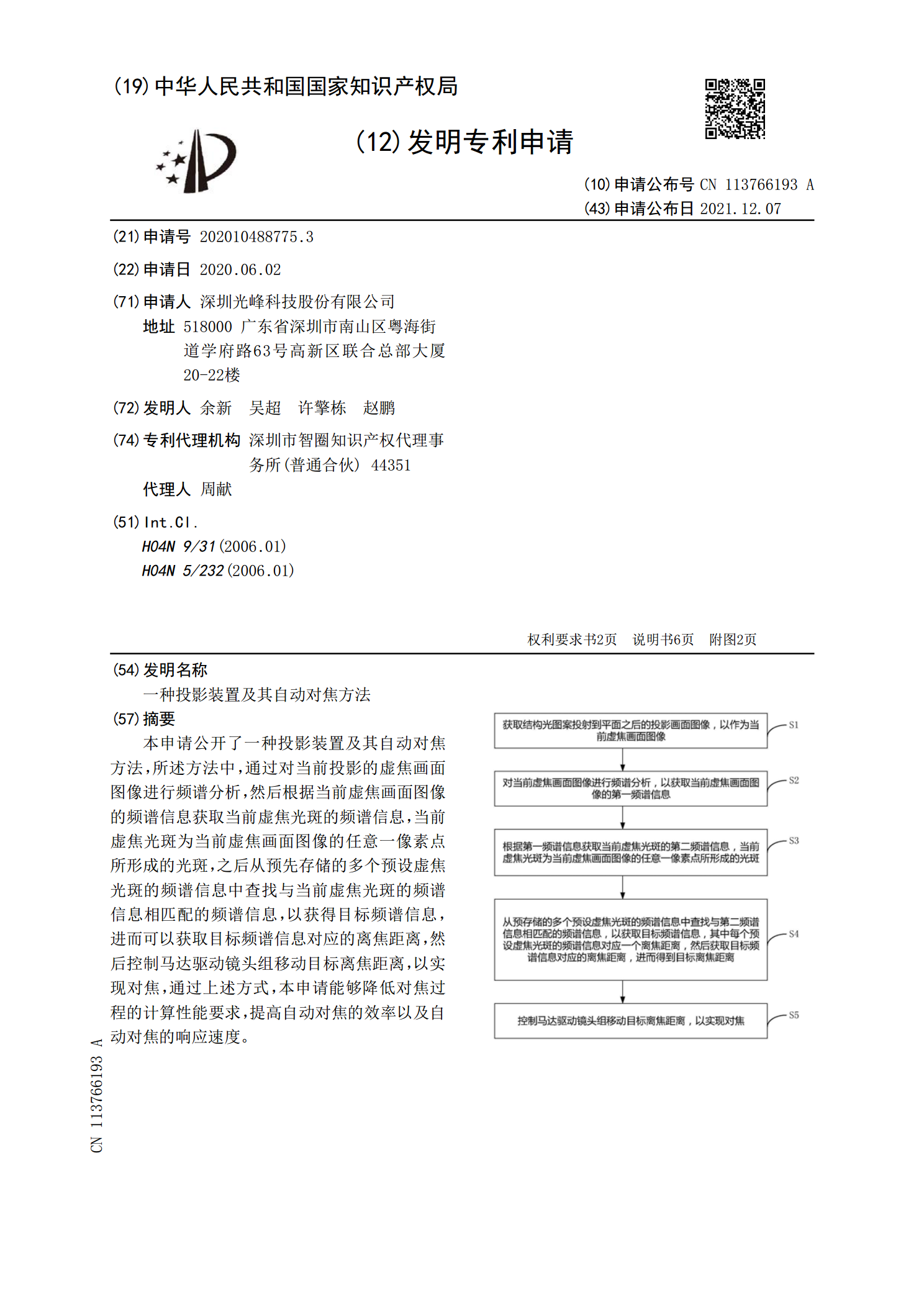
本申请公开了一种投影装置及其自动对焦方法,所述方法中,通过对当前投影的虚焦画面图像进行频谱分析,然后根据当前虚焦画面图像的频谱信息获取当前虚焦光斑的频谱信息,当前虚焦光斑为当前虚焦画面图像的任意一像素点所形成的光斑,之后从预先存储的多个预设虚焦光斑的频谱信息中查找与当前虚焦光斑的频谱信息相匹配的频谱信息,以获得目标频谱信息,进而可以获取目标频谱信息对应的离焦距离,然后控制马达驱动镜头组移动目标离焦距离,以实现对焦,通过上述方式,本申请能够降低对焦过程的计算性能要求,提高自动对焦的效率以及自动对焦的响应速度
显微镜的快速自动对焦方法.pdf
本发明公开了一种显微镜的快速自动对焦方法,其包括先控制粗准焦螺旋驱动载物台升降粗调焦距,再控制细准焦螺旋驱动载物台升降细调焦距,细调焦距包括步骤:1)以粗调焦距得到的调焦距离区间为基础,控制细准焦螺旋驱动载物台在该调焦距离区间内先上升再下降并采集图像,使用Tenengrad梯度函数对比目标对象的清晰度并选择最清晰图像,根据最清晰图像得到对应的载物台最优位置;2)对步骤1)得到的载物台最优位置进行验证;3)控制细准焦螺旋驱动载物台从最后停留的位置移动至载物台最优位置。本发明既能保证对焦速度,又能保证对焦精度