
显微镜的快速自动对焦方法.pdf

是你****平呀

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
显微镜的快速自动对焦方法.pdf
本发明公开了一种显微镜的快速自动对焦方法,其包括先控制粗准焦螺旋驱动载物台升降粗调焦距,再控制细准焦螺旋驱动载物台升降细调焦距,细调焦距包括步骤:1)以粗调焦距得到的调焦距离区间为基础,控制细准焦螺旋驱动载物台在该调焦距离区间内先上升再下降并采集图像,使用Tenengrad梯度函数对比目标对象的清晰度并选择最清晰图像,根据最清晰图像得到对应的载物台最优位置;2)对步骤1)得到的载物台最优位置进行验证;3)控制细准焦螺旋驱动载物台从最后停留的位置移动至载物台最优位置。本发明既能保证对焦速度,又能保证对焦精度

显微镜压片镜检自动对焦方法.pdf
本发明公开了一种显微镜压片镜检自动对焦方法,首先将高清相机通过显微镜拍摄的每个湿片画面进行灰度处理,得到灰度图像;然后对灰度图像进行降噪(Blur)处理;将降噪处理后得到的图像切割为9个画面,分别对切割的每个画面进行边缘检测;当某一画面像素找到方差峰值时,则认为该画面已确定了焦面,记录该方差峰值和步进电机的脉冲值并保留;如果有超过10%的画面找到焦面,则认为正在接近焦点进入微调;当9个画面都定焦结束后,得到9个脉冲值数据和方差值,9个脉冲值数据按照得分权重计算期望值,将期望值记为该对焦过程的结果数据,即焦
一种快速对焦显微镜.pdf
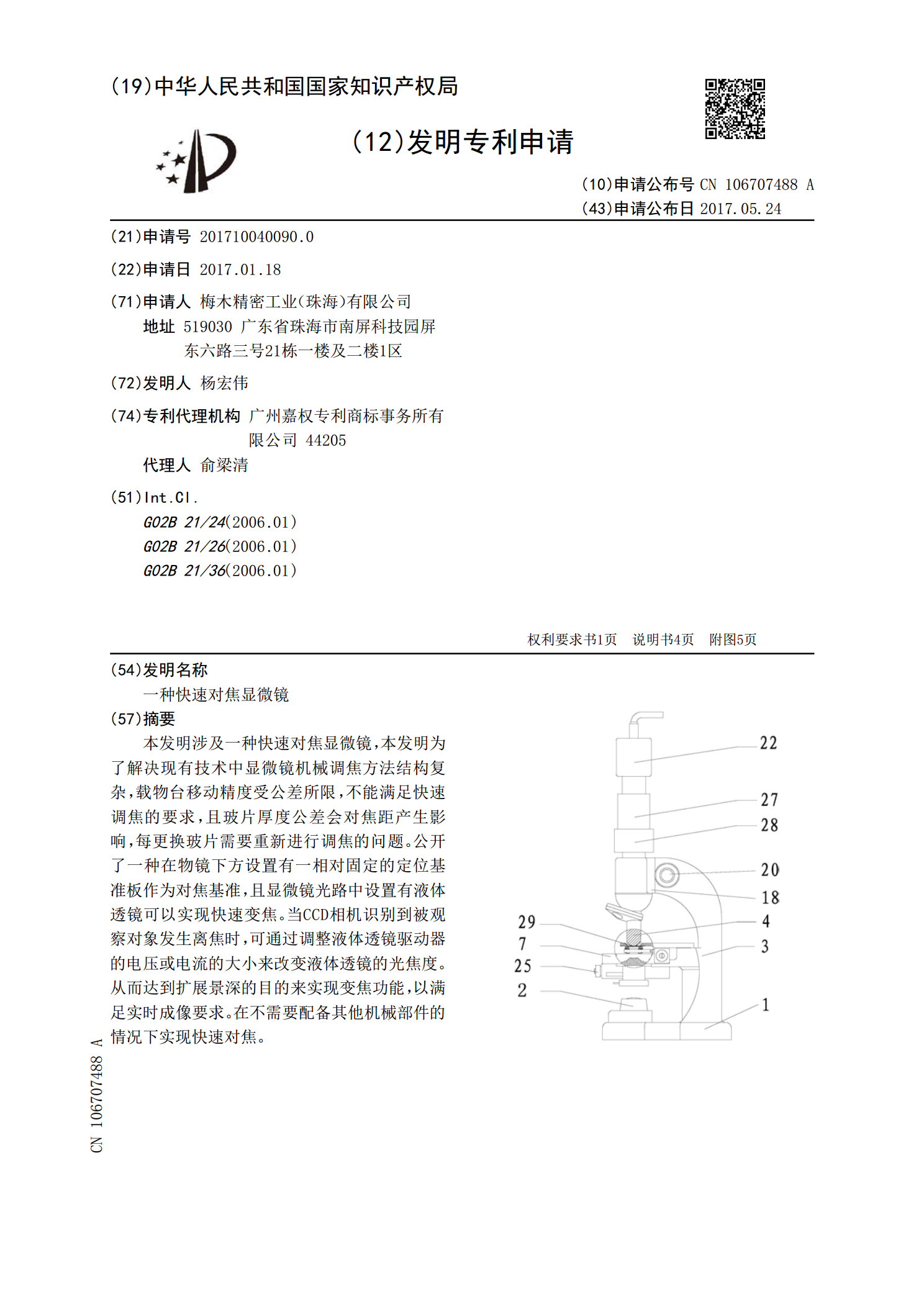
本发明涉及一种快速对焦显微镜,本发明为了解决现有技术中显微镜机械调焦方法结构复杂,载物台移动精度受公差所限,不能满足快速调焦的要求,且玻片厚度公差会对焦距产生影响,每更换玻片需要重新进行调焦的问题。公开了一种在物镜下方设置有一相对固定的定位基准板作为对焦基准,且显微镜光路中设置有液体透镜可以实现快速变焦。当CCD相机识别到被观察对象发生离焦时,可通过调整液体透镜驱动器的电压或电流的大小来改变液体透镜的光焦度。从而达到扩展景深的目的来实现变焦功能,以满足实时成像要求。在不需要配备其他机械部件的情况下实现快速

基于人工鱼群算法的显微镜自动对焦窗口选择方法.pdf
本发明涉及一种基于人工鱼群算法的显微镜自动对焦窗口选择方法,以整幅图像中细节最丰富的区域作为对焦窗口的选取依据,利用人工鱼群算法在整幅图上进行搜索,保证调焦精度的同时,有效改善效率。将显微镜自动对焦的图像信息映射到人工鱼群算法中,初始化参数;初始化公告板;引入动态权衡因子策略;更新人工鱼状态;重置初始化参数;检查终止条件。对图像采用了二值化处理,不仅保留了原图的信息,还大大减少了处理的数据量;引入动态权衡因子,实时调整人工鱼的步长及视野,提高算法效率;针对人工鱼群算法局部优值的问题,每次迭代后,根据所求最
自动对焦方法.pdf
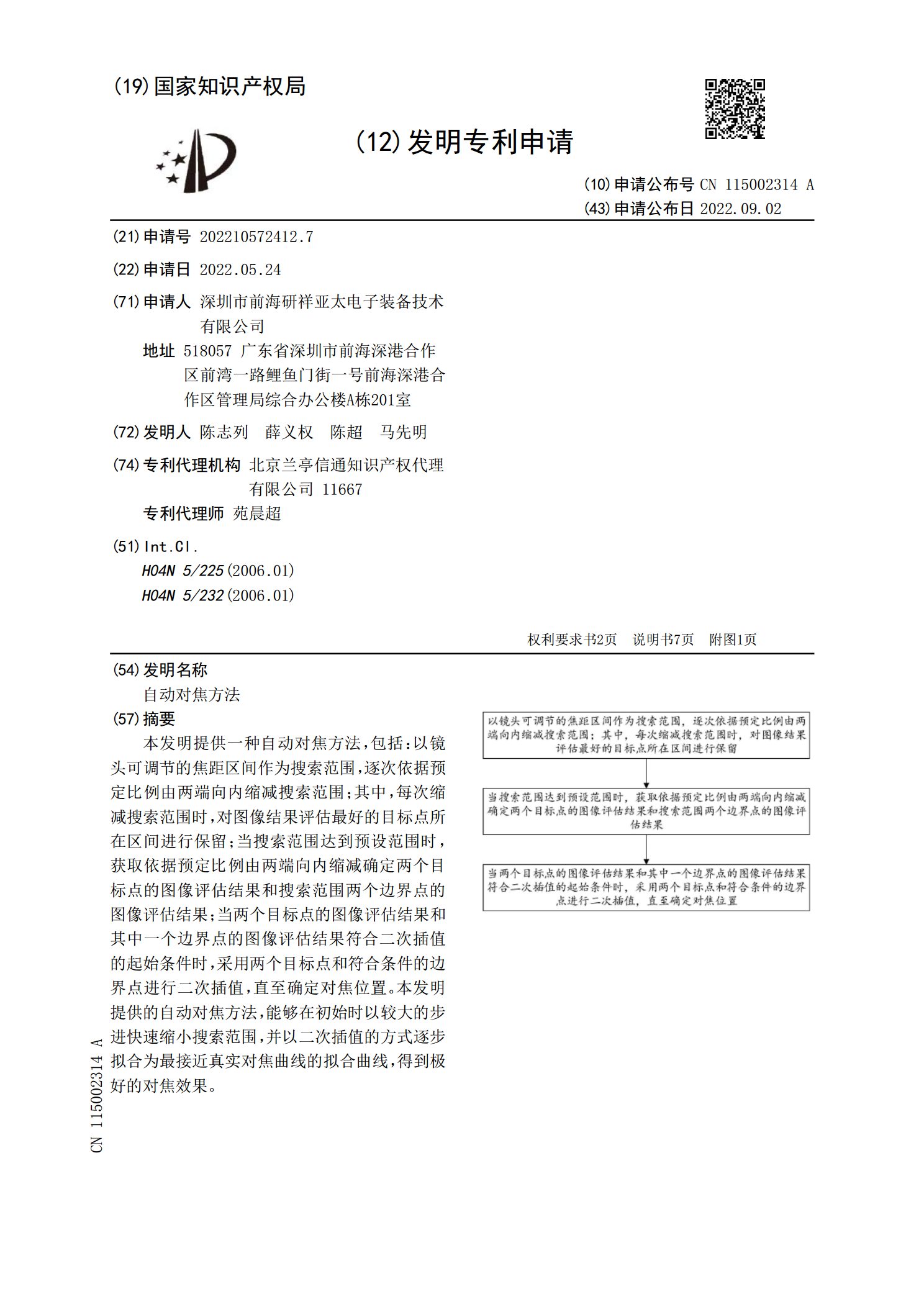
本发明提供一种自动对焦方法,包括:以镜头可调节的焦距区间作为搜索范围,逐次依据预定比例由两端向内缩减搜索范围;其中,每次缩减搜索范围时,对图像结果评估最好的目标点所在区间进行保留;当搜索范围达到预设范围时,获取依据预定比例由两端向内缩减确定两个目标点的图像评估结果和搜索范围两个边界点的图像评估结果;当两个目标点的图像评估结果和其中一个边界点的图像评估结果符合二次插值的起始条件时,采用两个目标点和符合条件的边界点进行二次插值,直至确定对焦位置。本发明提供的自动对焦方法,能够在初始时以较大的步进快速缩小搜索范