
设备定位方法、装置、非易失性存储介质及处理器.pdf

一吃****春艳


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

设备定位方法、装置、非易失性存储介质及处理器.pdf
本发明公开了一种设备定位方法、装置、非易失性存储介质及处理器。其中,该方法包括:根据预先确定的多种道路元素类型,将第一地图分割为和多种道路元素类型一一对应的多个第二地图;采集得到目标设备的第一传感信息,其中,第一传感信息为目标设备当前所处位置的道路传感信息;根据多种道路元素类型,将第一传感信息分割为多组和多种道路元素类型一一对应第二传感信息;根据多种道路元素类型,分别将同一道路元素类型对应的第二地图和第二传感信息进行配准,得到多个局部最优位姿;融合多个局部最优位姿,得到目标设备当前的全局最优位姿。本发明解

路线定位方法、装置、非易失性存储介质及处理器.pdf
本发明公开了一种路线定位方法、装置、非易失性存储介质及处理器。其中,该方法包括:在目标对象与定位系统断开连接的情况下,采集目标对象的第一行驶数据,其中,第一行驶数据为目标对象与定位系统断开连接后产生的数据;发送第一行驶数据至云服务器;接收云服务器返回的定位数据,其中,定位数据用于描述目标对象与定位系统断开连接时目标对象的行驶路线信息。本发明解决了当对象与定位系统失联时,无法准确定位对象的行驶路线的技术问题。

设备的连接方法及装置、非易失性存储介质、处理器.pdf
本申请公开了一种设备的连接方法及装置、非易失性存储介质、处理器。其中,该方法包括:生成密钥对,其中,密钥对包括:公钥和私钥;将公钥发送至注册到设备管理平台的待调试设备,其中,待调试设备在接收到公钥后启动服务端程序;接收来自目标对象对应的终端设备的连接指令,其中,连接指令用于连接待调试设备;响应于连接指令,基于客户端程序和服务端程序,通过公钥与私钥的目标匹配结果,连接待调试设备,其中,服务端程序与客户端程序为基于安全外壳协议的程序。本申请解决了由于安卓设备中的默认调试工具无法提供根权限造成的设备连接效率低下

验证方法、装置、非易失性存储介质及处理器.pdf
本发明公开了一种验证方法、装置、非易失性存储介质及处理器。其中,该方法包括:从数据库中获取至少一张素材图片以及素材图片对应的图片信息,其中,每张素材图片包括目标生物,图片信息用于描述目标生物;根据素材图片,生成验证提示图片,并根据素材图片对应的图片信息生成验证字符;展示验证提示图片,并接收输入字符;在输入字符与验证字符匹配的情况下,确定通过验证。本发明解决了验证码容易被识别算法攻破导致失去验证效果的技术问题。
家电设备的控制方法及装置、非易失性存储介质、处理器.pdf
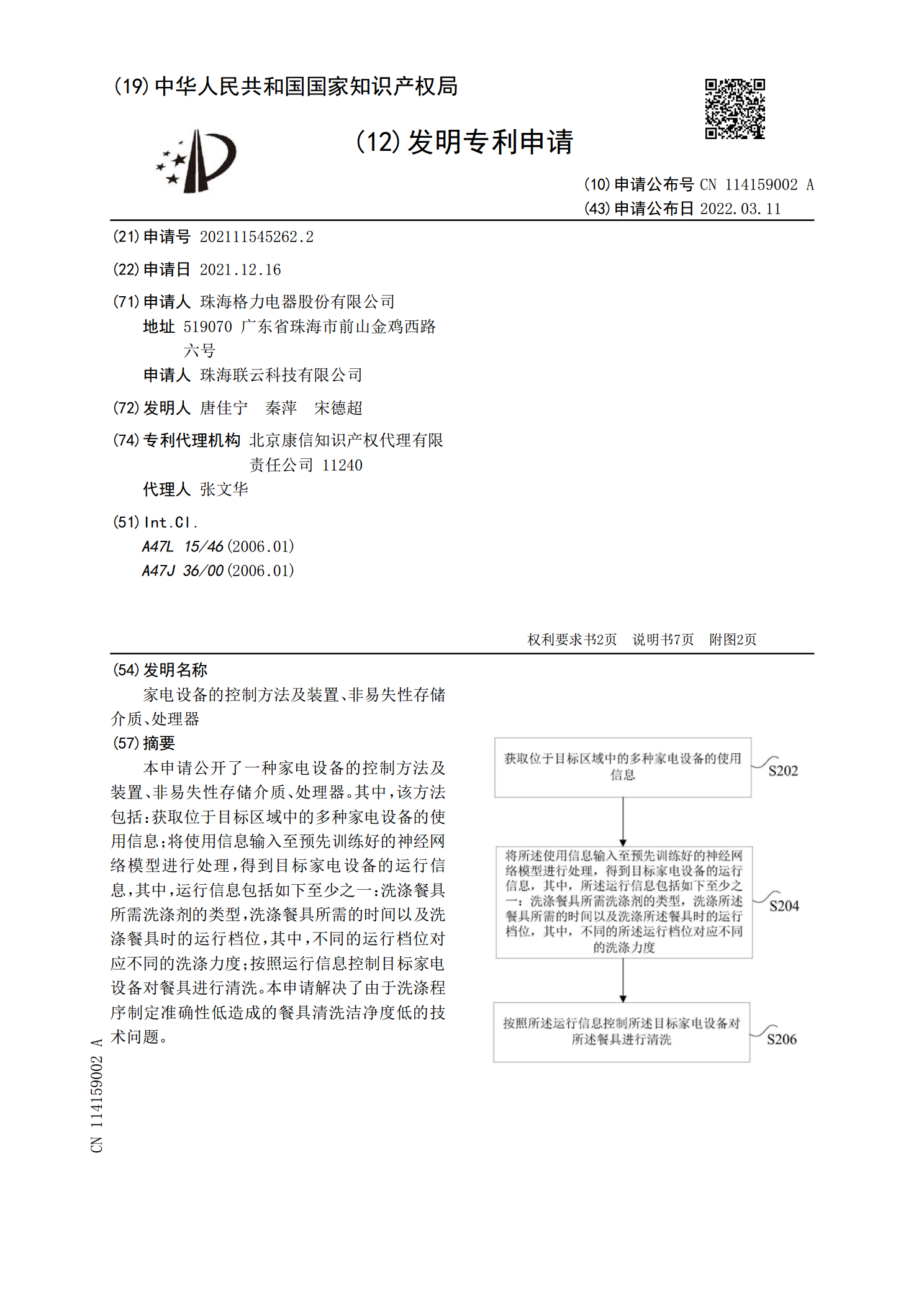
本申请公开了一种家电设备的控制方法及装置、非易失性存储介质、处理器。其中,该方法包括:获取位于目标区域中的多种家电设备的使用信息;将使用信息输入至预先训练好的神经网络模型进行处理,得到目标家电设备的运行信息,其中,运行信息包括如下至少之一:洗涤餐具所需洗涤剂的类型,洗涤餐具所需的时间以及洗涤餐具时的运行档位,其中,不同的运行档位对应不同的洗涤力度;按照运行信息控制目标家电设备对餐具进行清洗。本申请解决了由于洗涤程序制定准确性低造成的餐具清洗洁净度低的技术问题。