
一种红外图像处理的方法及装置.pdf

春岚****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共57页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种红外图像处理的方法及装置.pdf
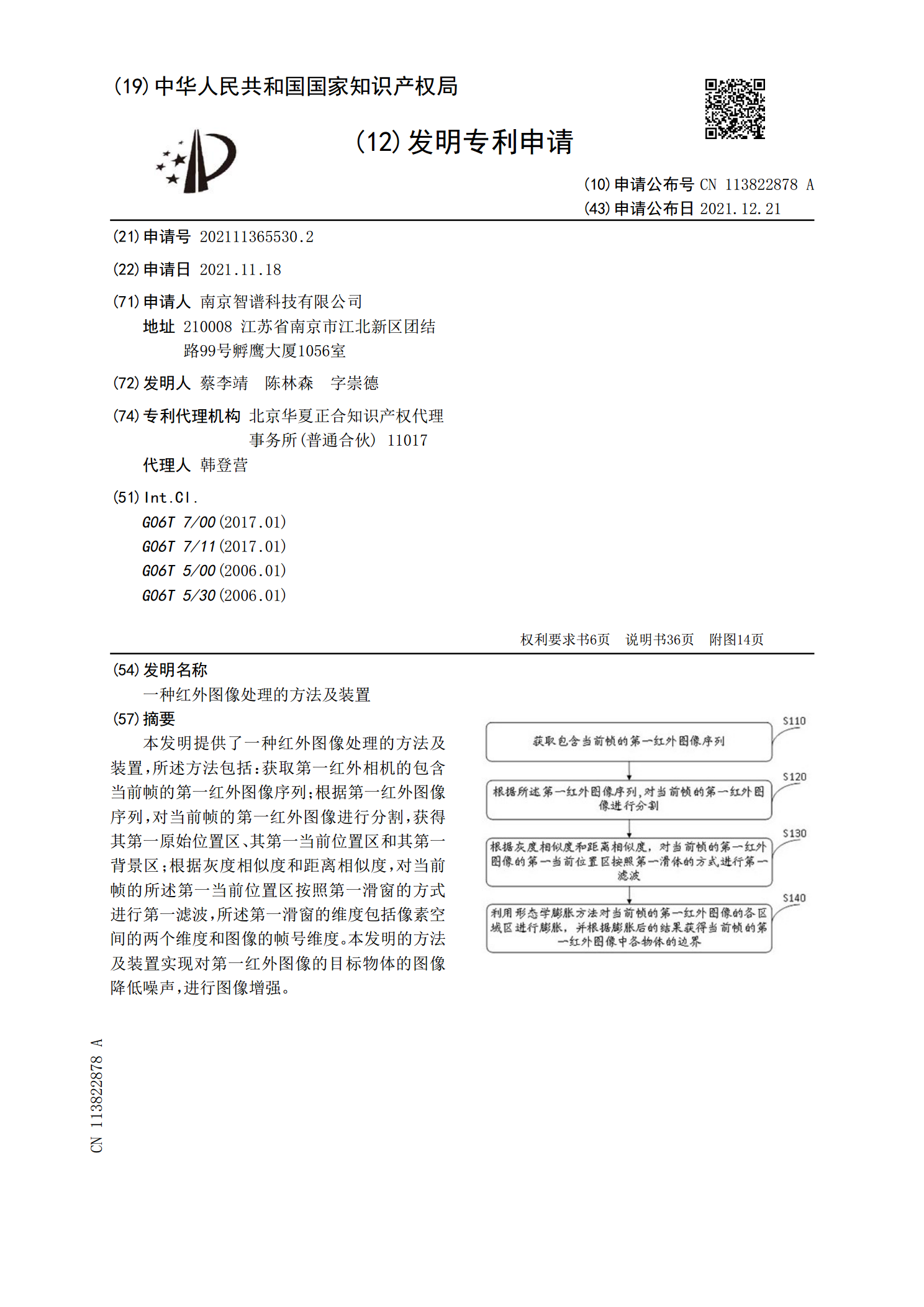
本发明提供了一种红外图像处理的方法及装置,所述方法包括:获取第一红外相机的包含当前帧的第一红外图像序列;根据第一红外图像序列,对当前帧的第一红外图像进行分割,获得其第一原始位置区、其第一当前位置区和其第一背景区;根据灰度相似度和距离相似度,对当前帧的所述第一当前位置区按照第一滑窗的方式进行第一滤波,所述第一滑窗的维度包括像素空间的两个维度和图像的帧号维度。本发明的方法及装置实现对第一红外图像的目标物体的图像降低噪声,进行图像增强。
红外图像处理方法及装置.pdf
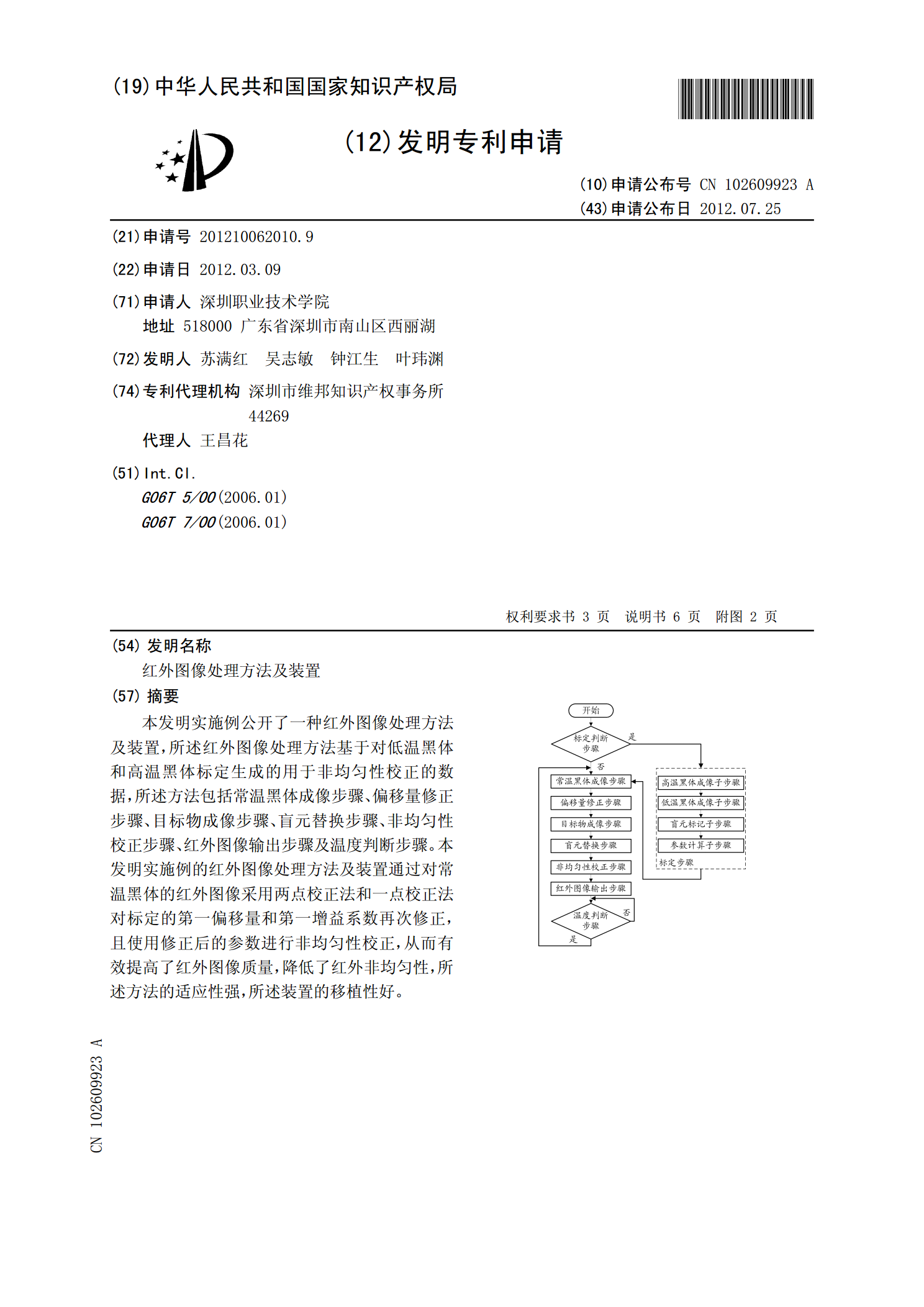
本发明实施例公开了一种红外图像处理方法及装置,所述红外图像处理方法基于对低温黑体和高温黑体标定生成的用于非均匀性校正的数据,所述方法包括常温黑体成像步骤、偏移量修正步骤、目标物成像步骤、盲元替换步骤、非均匀性校正步骤、红外图像输出步骤及温度判断步骤。本发明实施例的红外图像处理方法及装置通过对常温黑体的红外图像采用两点校正法和一点校正法对标定的第一偏移量和第一增益系数再次修正,且使用修正后的参数进行非均匀性校正,从而有效提高了红外图像质量,降低了红外非均匀性,所述方法的适应性强,所述装置的移植性好。
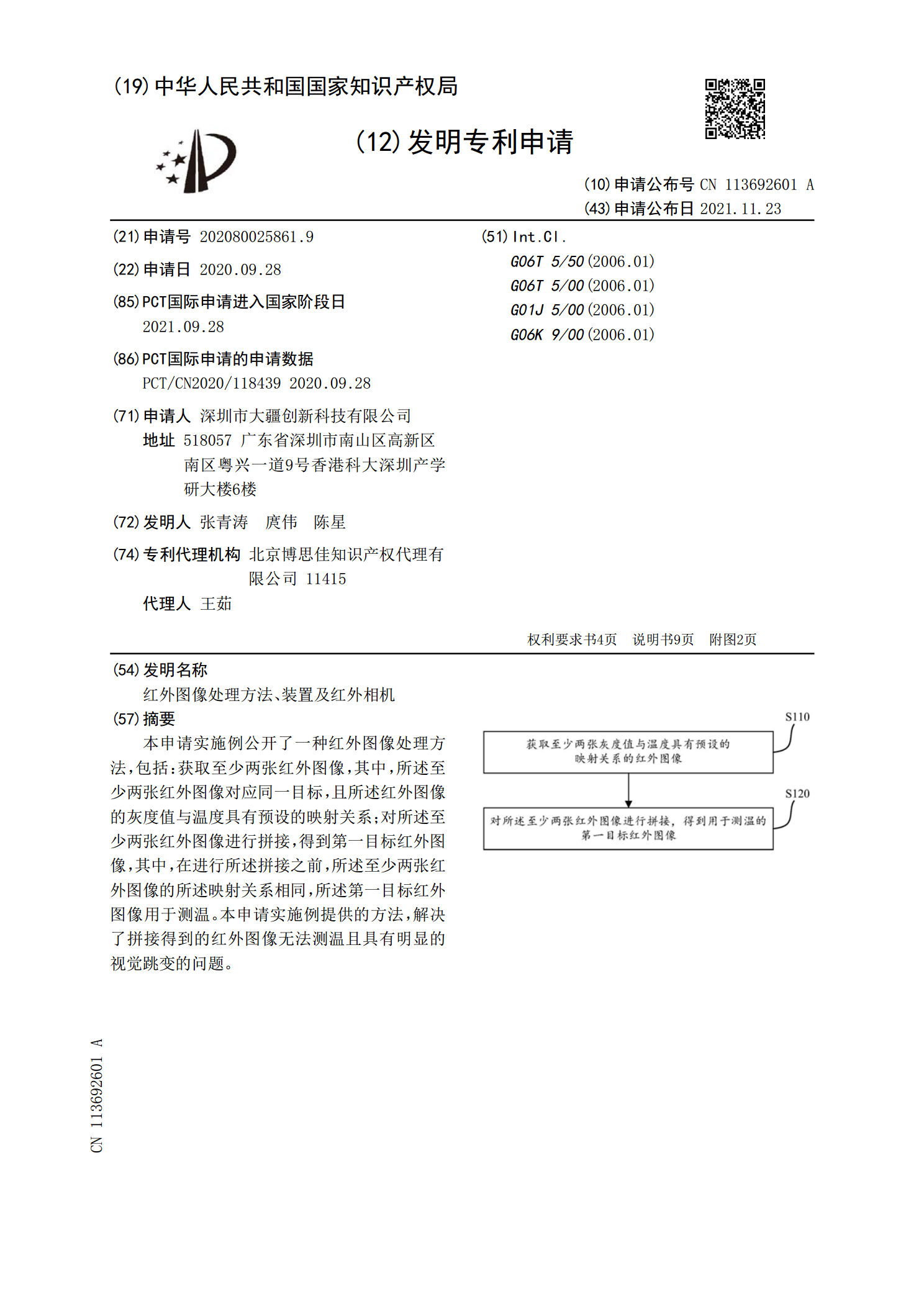
红外图像处理方法、装置及红外相机.pdf
本申请实施例公开了一种红外图像处理方法,包括:获取至少两张红外图像,其中,所述至少两张红外图像对应同一目标,且所述红外图像的灰度值与温度具有预设的映射关系;对所述至少两张红外图像进行拼接,得到第一目标红外图像,其中,在进行所述拼接之前,所述至少两张红外图像的所述映射关系相同,所述第一目标红外图像用于测温。本申请实施例提供的方法,解决了拼接得到的红外图像无法测温且具有明显的视觉跳变的问题。
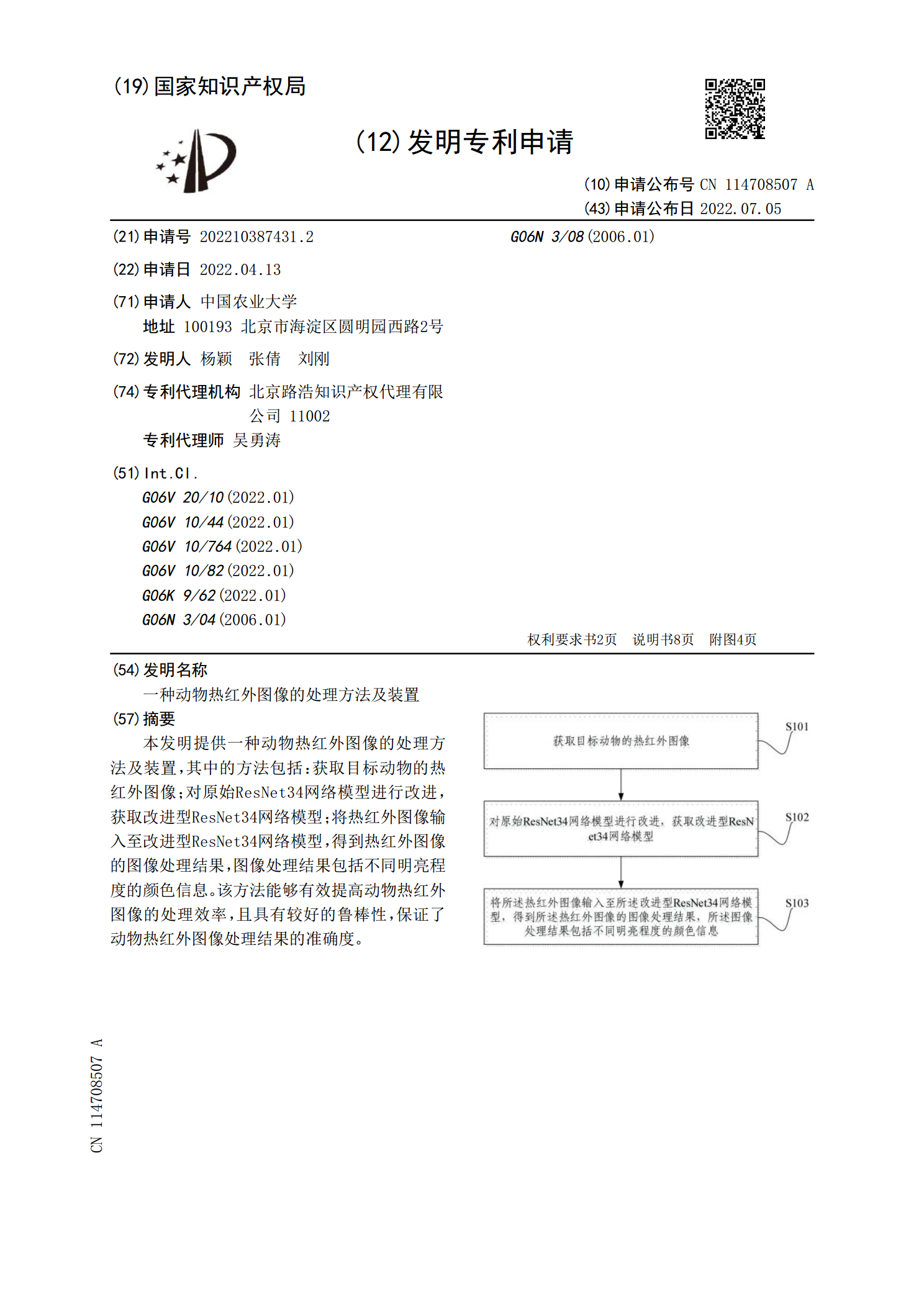
一种动物热红外图像的处理方法及装置.pdf
本发明提供一种动物热红外图像的处理方法及装置,其中的方法包括:获取目标动物的热红外图像;对原始ResNet34网络模型进行改进,获取改进型ResNet34网络模型;将热红外图像输入至改进型ResNet34网络模型,得到热红外图像的图像处理结果,图像处理结果包括不同明亮程度的颜色信息。该方法能够有效提高动物热红外图像的处理效率,且具有较好的鲁棒性,保证了动物热红外图像处理结果的准确度。
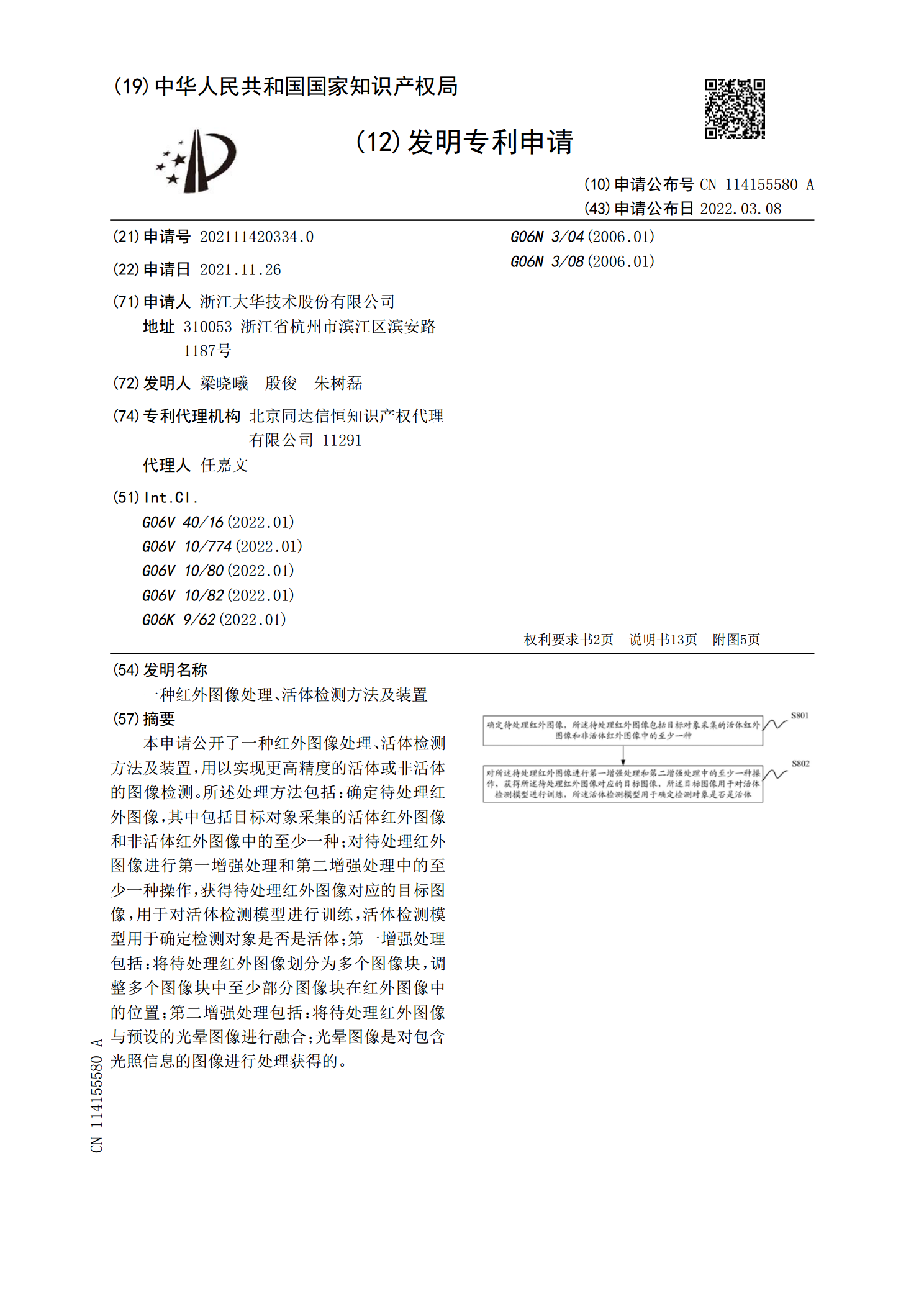
一种红外图像处理、活体检测方法及装置.pdf
本申请公开了一种红外图像处理、活体检测方法及装置,用以实现更高精度的活体或非活体的图像检测。所述处理方法包括:确定待处理红外图像,其中包括目标对象采集的活体红外图像和非活体红外图像中的至少一种;对待处理红外图像进行第一增强处理和第二增强处理中的至少一种操作,获得待处理红外图像对应的目标图像,用于对活体检测模型进行训练,活体检测模型用于确定检测对象是否是活体;第一增强处理包括:将待处理红外图像划分为多个图像块,调整多个图像块中至少部分图像块在红外图像中的位置;第二增强处理包括:将待处理红外图像与预设的光晕图