
液体喷洒装置及其控制方法、无人飞行器和存储介质.pdf

韶敏****ab


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
液体喷洒装置及其控制方法、无人飞行器和存储介质.pdf
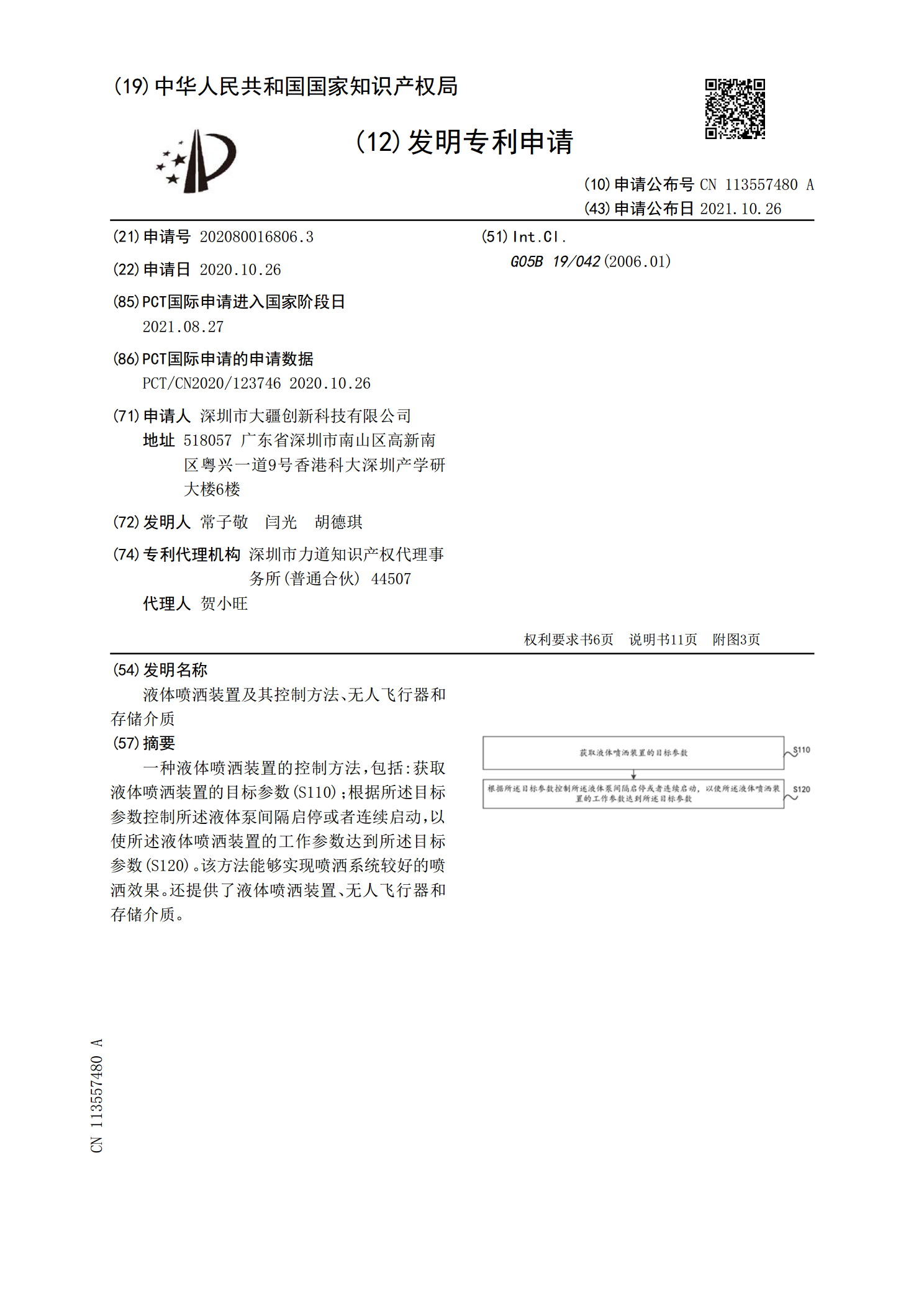
一种液体喷洒装置的控制方法,包括:获取液体喷洒装置的目标参数(S110);根据所述目标参数控制所述液体泵间隔启停或者连续启动,以使所述液体喷洒装置的工作参数达到所述目标参数(S120)。该方法能够实现喷洒系统较好的喷洒效果。还提供了液体喷洒装置、无人飞行器和存储介质。

喷洒作业控制方法、装置、存储介质及农业无人飞行器.pdf
一种喷洒作业控制方法、装置、存储介质及农业无人飞行器,所述农业无人飞行器包括多个螺旋桨及多个喷头,每个螺旋桨下方设置至少一个喷头,所述方法包括:获取农业无人飞行器的飞行状态参数(S100);根据飞行状态参数,确定每个螺旋桨对应的目标倾斜角度;其中,目标倾斜角度下,农业无人飞行器在所述飞行状态下形成的喷幅为预设喷幅(S200);根据所述目标倾斜角度,调整螺旋桨的倾斜角度(S300);基于调整后的螺旋桨的倾斜角度进行喷洒作业(S400)。所述方法根据飞行状态对应调整螺旋桨的倾斜角度,使得在不同的飞行状态下,所

喷洒作业控制方法、装置、飞行器及存储介质.pdf
本发明涉及自动化作业技术领域,提供一种喷洒作业控制方法、装置、飞行器及存储介质。通过先根据获取到的待处理图像,确定实际喷洒的目标区域,该待处理图像为飞行器在执行喷洒作业过程中采集的作业区域的图像;并根据目标区域,预测环境风的信息;基于环境风的信息,调整喷洒作业的作业参数;再根据调整后的作业参数,控制飞行器执行喷洒作业。通过对环境风进行预测和调整作业参数,从而避免了环境风对喷洒作业的影响,提高了喷洒的准确度。
无人飞行器的航线规划方法、装置和存储介质.pdf
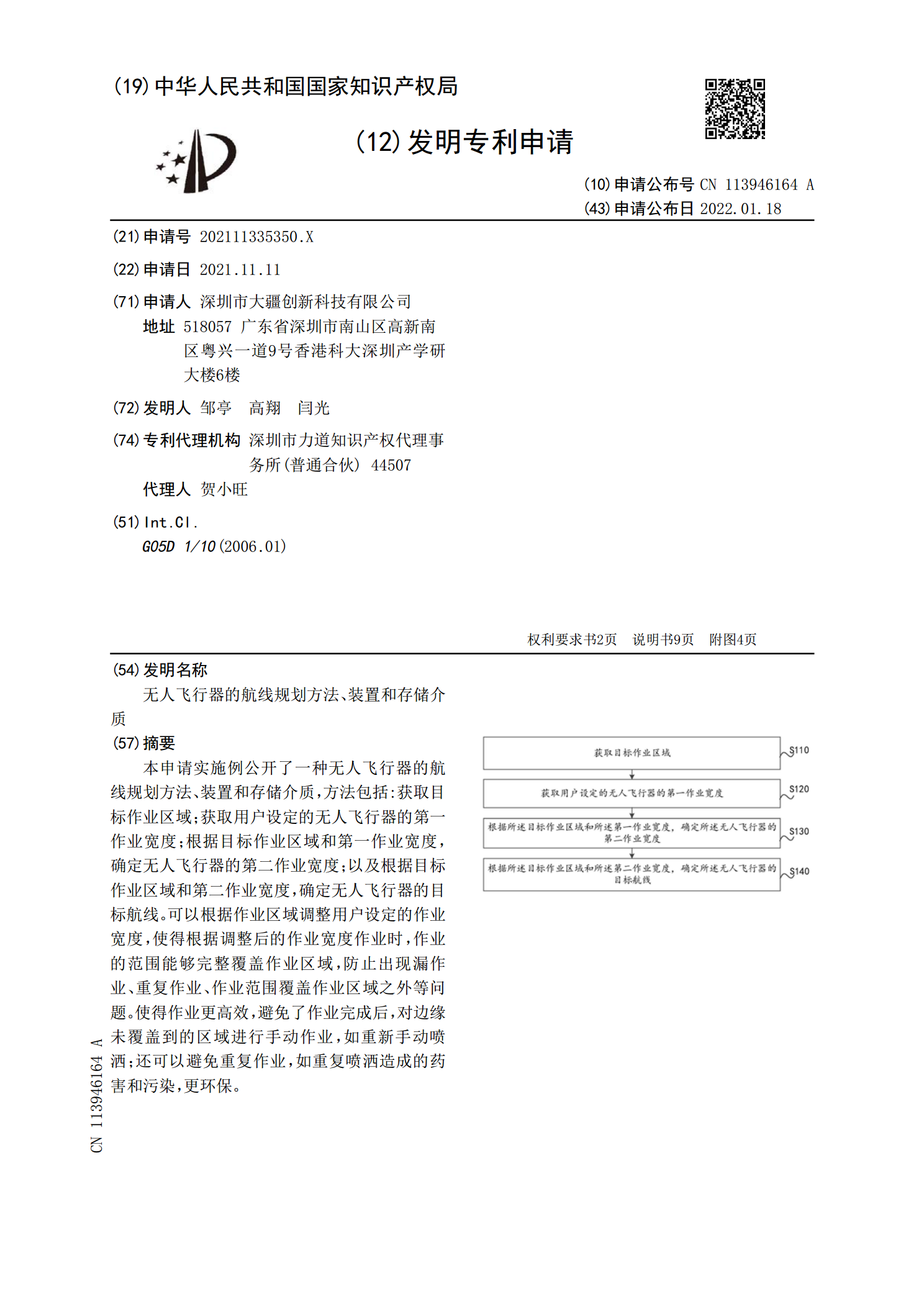
本申请实施例公开了一种无人飞行器的航线规划方法、装置和存储介质,方法包括:获取目标作业区域;获取用户设定的无人飞行器的第一作业宽度;根据目标作业区域和第一作业宽度,确定无人飞行器的第二作业宽度;以及根据目标作业区域和第二作业宽度,确定无人飞行器的目标航线。可以根据作业区域调整用户设定的作业宽度,使得根据调整后的作业宽度作业时,作业的范围能够完整覆盖作业区域,防止出现漏作业、重复作业、作业范围覆盖作业区域之外等问题。使得作业更高效,避免了作业完成后,对边缘未覆盖到的区域进行手动作业,如重新手动喷洒;还可以避

一种无人飞行器的控制方法、无人飞行器及存储介质.pdf
一种无人飞行器的控制方法、无人飞行器及存储介质,其中,该方法包括:根据无人飞行器的传感器输出的传感数据确定障碍物与无人飞行器之间的距离(S201);当距离小于或等于预设距离阈值时,控制无人飞行器执行展示工作任务(S202),其中,无人飞行器不处于飞行状态,展示工作任务包括无人飞行器的指示灯按照预设模式工作,和/或无人飞行器的动力部件怠速工作。该方法可以在确保安全的基础上,增加无人飞行器和用户之间的互动乐趣,以达到吸引用户注意力的目的。