
智能汽车最优决控模型构建及求解方法、装置和存储介质.pdf

婀娜****aj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能汽车最优决控模型构建及求解方法、装置和存储介质.pdf
本公开提供的智能汽车最优决控模型构建及求解方法、装置和存储介质,包括:构建智能汽车的最优决控模型,以最小化自车的路径跟踪性能和预测跟踪误差之和作为最优决控模型的目标函数,分别以自车动力学模型、自车与周围交通参与者的距离、自车与道路的距离和自车与信号灯的距离作为最优决控模型的运动约束和安全约束,以评价函数和策略函数作为最优决控模型的输出;建立学习型罚函数方法处理安全约束,在探索过程中监测不安全的驾驶状态并对违反约束的策略施加惩罚,使得策略朝着满足约束的方向迭代,最终输出最优决控模型的最优策略函数和最优评价函
一种智能汽车连续时间最优决控模型构建及求解方法.pdf
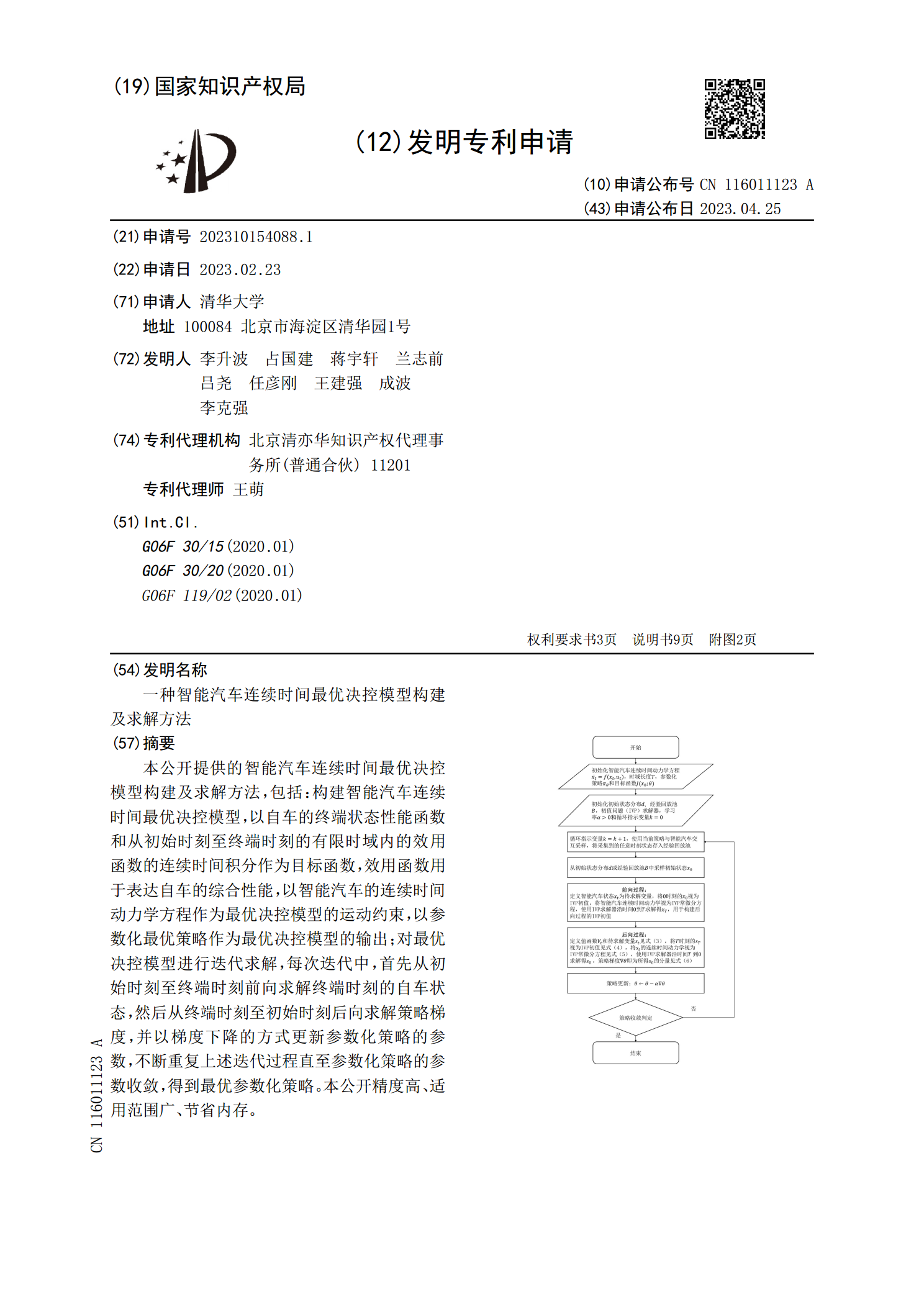
本公开提供的智能汽车连续时间最优决控模型构建及求解方法,包括:构建智能汽车连续时间最优决控模型,以自车的终端状态性能函数和从初始时刻至终端时刻的有限时域内的效用函数的连续时间积分作为目标函数,效用函数用于表达自车的综合性能,以智能汽车的连续时间动力学方程作为最优决控模型的运动约束,以参数化最优策略作为最优决控模型的输出;对最优决控模型进行迭代求解,每次迭代中,首先从初始时刻至终端时刻前向求解终端时刻的自车状态,然后从终端时刻至初始时刻后向求解策略梯度,并以梯度下降的方式更新参数化策略的参数,不断重复上述迭

灯控模型的构建方法及灯控方法、系统、装置和存储介质.pdf
本发明提供一种基于BIM的灯控模型的构建方法及灯控方法、系统、装置和存储介质。其中,灯控模型用于控制一个或多个照明设备;灯控模型的构建方法包括:选择获取一个或多个照明设备的状态信息和位置信息;根据状态信息,构建与各照明设备对应的各BIM子模型;BIM子模型包括照明设备模块和照明设备操控模块;将与各照明设备对应的BIM子模型按照对应的位置信息显示在地图显示界面上,以形成灯控模型。灯控办法是利用构建的灯控模型,通过网络将照明设备与BIM子模型相匹配,通过BIM子模型实现对照明设备的控制和使用效果的模拟。本发明

风控模型的构建方法、装置、存储介质及终端.pdf
本发明实施例公开了一种风控模型的构建方法、装置、存储介质及终端。该方法包括:获取预设时间段内至少一个用户的历史数据;提取历史数据所涉及的至少一类第一特征信息;针对各类第一特征信息,按照预设排序规则对历史数据中的第一特征信息进行排序,生成第一特征信息序列;确定第一特征信息在第一特征信息序列中的第一排列分位数;基于第一排列分位数对预设机器学习模型进行训练,生成风控模型。通过采用上述技术方案,以历史数据中各特征信息的排列分位数代替对应的特征信息,并基于各特征信息的排列分位数进行模型训练生成风控模型,使得构建的风

交通仿真模型构建方法、装置和存储介质.pdf
本申请涉及一种交通仿真模型构建方法、装置和存储介质,所述方法包括:根据模型中至少一个对象的第一运动轨迹,确定所述至少一个对象中、目标对象在预定范围内的至少一个交互对象,所述对象包括车辆、行人和非机动车中的一种或多种,所述至少一个交互对象包括与所述目标对象在所述预定范围内第一运动轨迹存在交点、且非跟驰关系的对象;根据所述目标对象与所述至少一个交互对象,确定所述目标对象的决策结果,所述决策结果用于指示目标对象针对所述交互对象的行为;根据所述决策结果和所述第一运动轨迹,确定所述目标对象在交通仿真模型中的第二运动