
一种智能汽车连续时间最优决控模型构建及求解方法.pdf

佳晨****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能汽车连续时间最优决控模型构建及求解方法.pdf
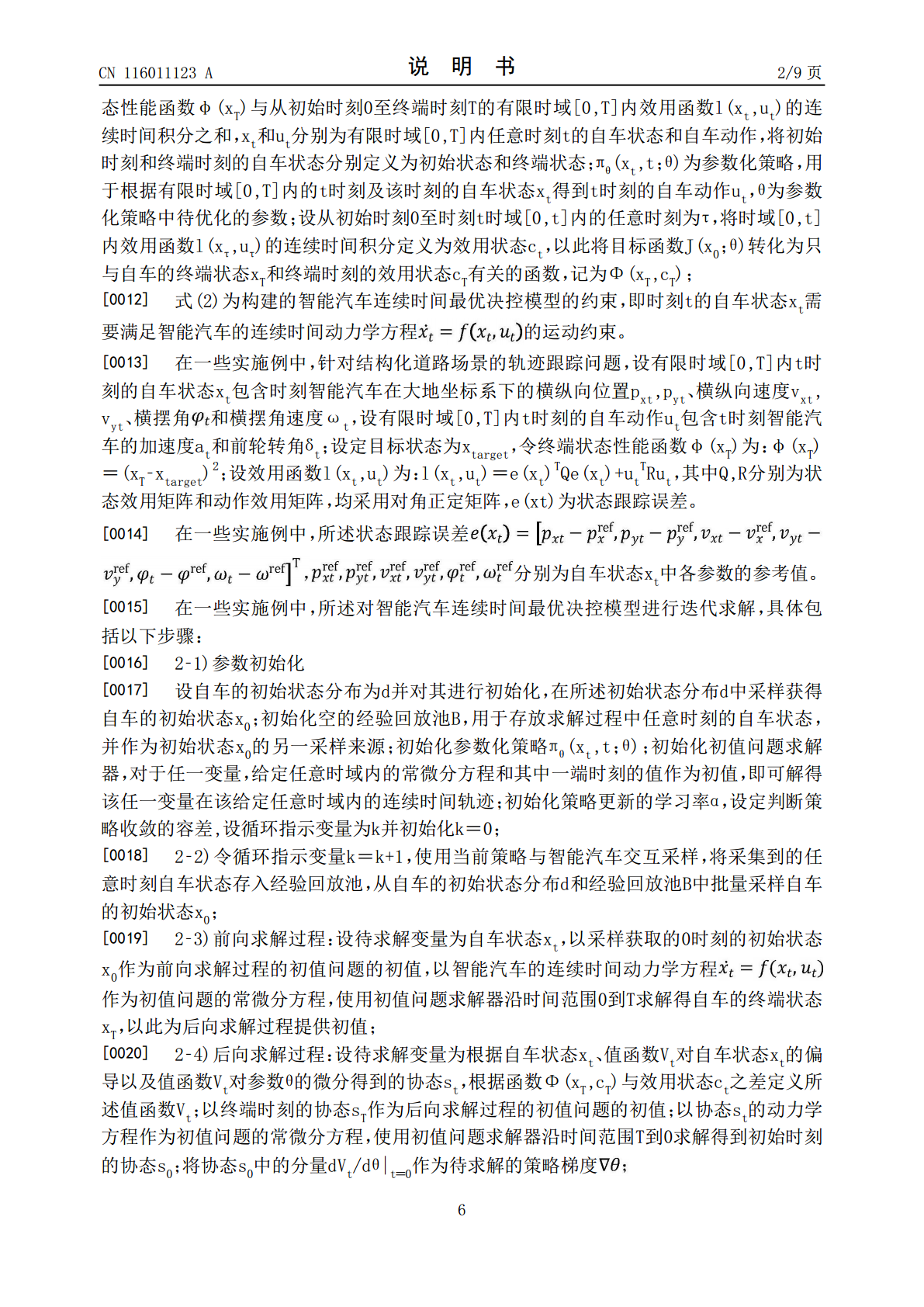
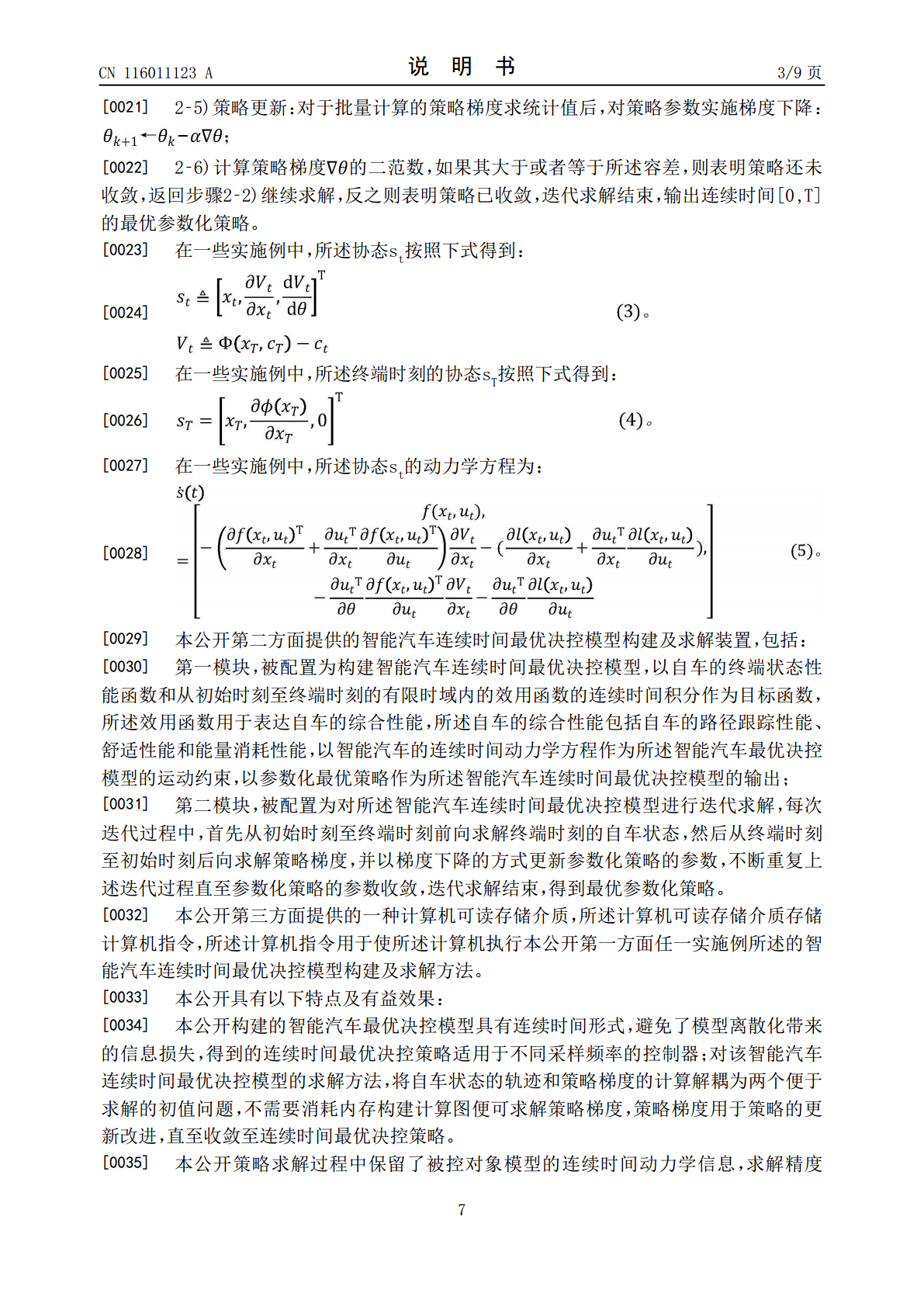
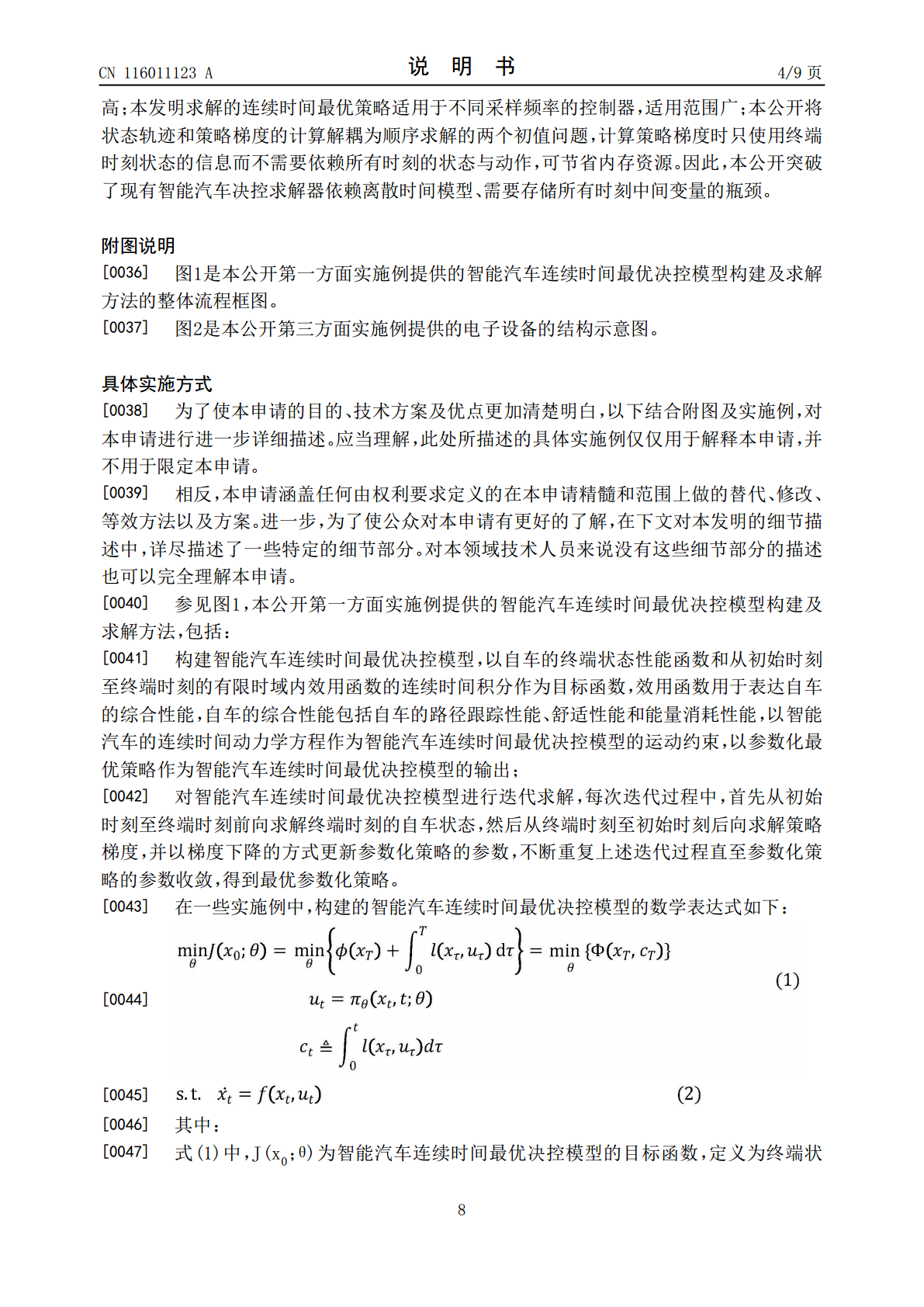
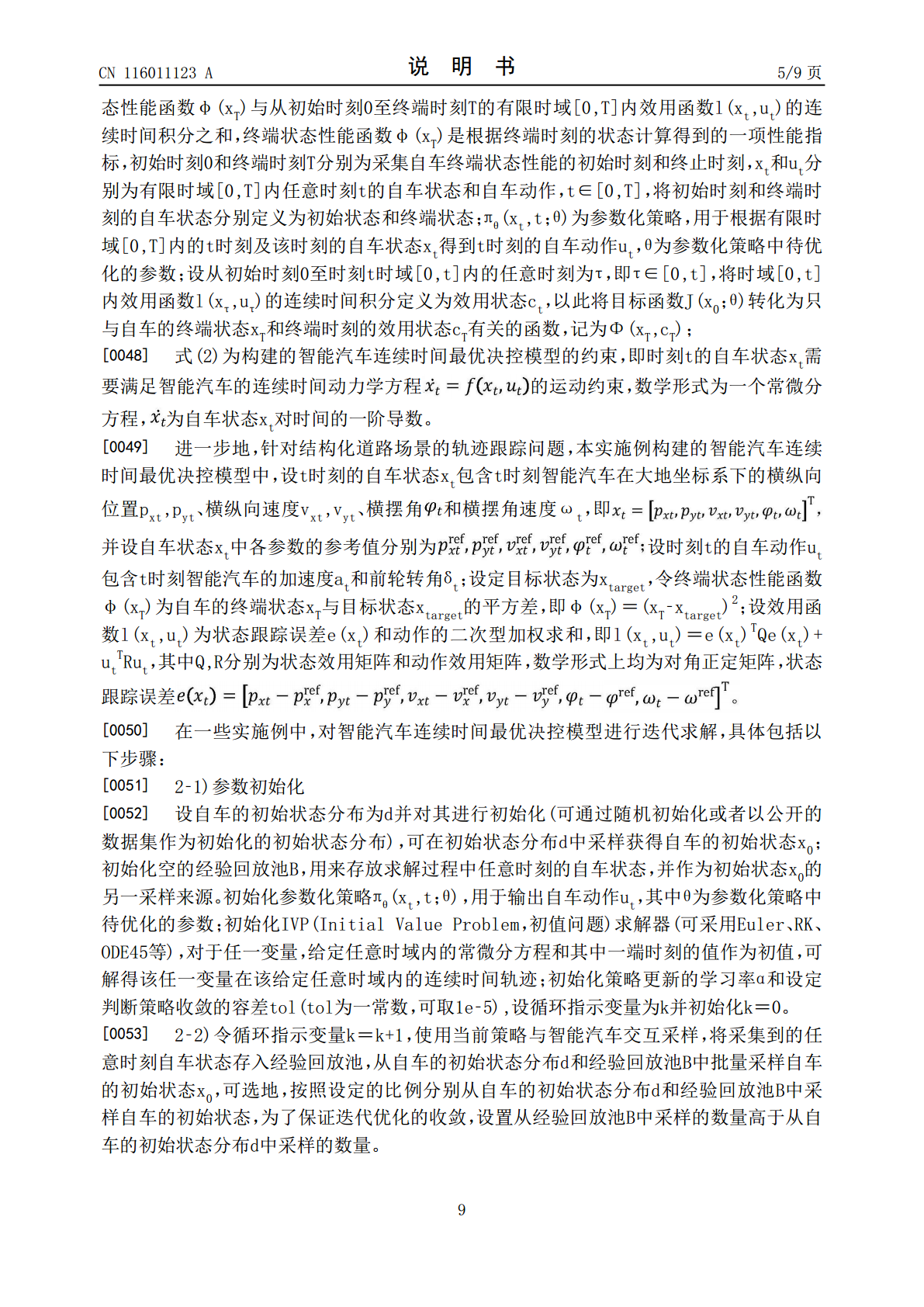
本公开提供的智能汽车连续时间最优决控模型构建及求解方法,包括:构建智能汽车连续时间最优决控模型,以自车的终端状态性能函数和从初始时刻至终端时刻的有限时域内的效用函数的连续时间积分作为目标函数,效用函数用于表达自车的综合性能,以智能汽车的连续时间动力学方程作为最优决控模型的运动约束,以参数化最优策略作为最优决控模型的输出;对最优决控模型进行迭代求解,每次迭代中,首先从初始时刻至终端时刻前向求解终端时刻的自车状态,然后从终端时刻至初始时刻后向求解策略梯度,并以梯度下降的方式更新参数化策略的参数,不断重复上述迭

智能汽车最优决控模型构建及求解方法、装置和存储介质.pdf
本公开提供的智能汽车最优决控模型构建及求解方法、装置和存储介质,包括:构建智能汽车的最优决控模型,以最小化自车的路径跟踪性能和预测跟踪误差之和作为最优决控模型的目标函数,分别以自车动力学模型、自车与周围交通参与者的距离、自车与道路的距离和自车与信号灯的距离作为最优决控模型的运动约束和安全约束,以评价函数和策略函数作为最优决控模型的输出;建立学习型罚函数方法处理安全约束,在探索过程中监测不安全的驾驶状态并对违反约束的策略施加惩罚,使得策略朝着满足约束的方向迭代,最终输出最优决控模型的最优策略函数和最优评价函

SMC模型求解最优动态客户保持投入的一种方法.docx
SMC模型求解最优动态客户保持投入的一种方法随着市场竞争的激烈和企业规模的不断扩大,客户保持成为企业不可或缺的一部分。然而,客户保持并不是一件容易的事情。为了实现最优的动态客户保持投入,企业需要利用可靠的数学模型来计算和分析各种可能的策略和决策。在此背景下,SMC(State-DependentControl)模型成为了一种有效的方法,用于解决如何最优地管理客户关系的问题。SMC模型是一种随机控制问题的数学模型。该模型通常用于研究不同决策对系统状态的影响,进而确定最佳决策策略以最小化特定的指标函数。在客户

连续时间MDP折扣模型的单调最优策略的任务书.docx
连续时间MDP折扣模型的单调最优策略的任务书连续时间MDP折扣模型的单调最优策略任务书一、任务背景在强化学习领域中,马尔科夫决策过程(MarkovDecisionProcess,MDP)是一种经典的数学模型,它用于描述一个基于马尔科夫性质的强化学习环境。在离散时间中,MDP使用累积奖励的期望来为每个可能的决策序列评估策略。但在许多实际应用中,时间是以连续方式流逝的,离散化这些时间可能会导致精度损失,因此这时需要使用连续时间MDP模型。其中折扣模型(discountedmodel)是指环境中的反馈信号按指数

含离散和连续混合决策变量最优潮流求解方法综述.docx
含离散和连续混合决策变量最优潮流求解方法综述随着电力系统规模的不断扩大和发电结构的不断变化,最优潮流问题已经成为电力系统规划和运行中的关键问题之一。然而,在实际情况下,最优潮流问题中的决策变量往往包含离散和连续两种类型,而离散和连续混合决策变量的最优化问题是一个非常复杂和困难的问题。因此,本文将综述目前含离散和连续混合决策变量最优潮流求解方法的研究现状和进展。1.含离散和连续混合决策变量问题的数学模型含离散和连续混合决策变量问题的数学模型可以表达为:minf(x,y)s.t.g(x,y)<=0h(x)=0