
一种机器人自动巡检防误方法、系统、设备及存储介质.pdf

努力****梓颖


1/7
2/7

3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人自动巡检防误方法、系统、设备及存储介质.pdf
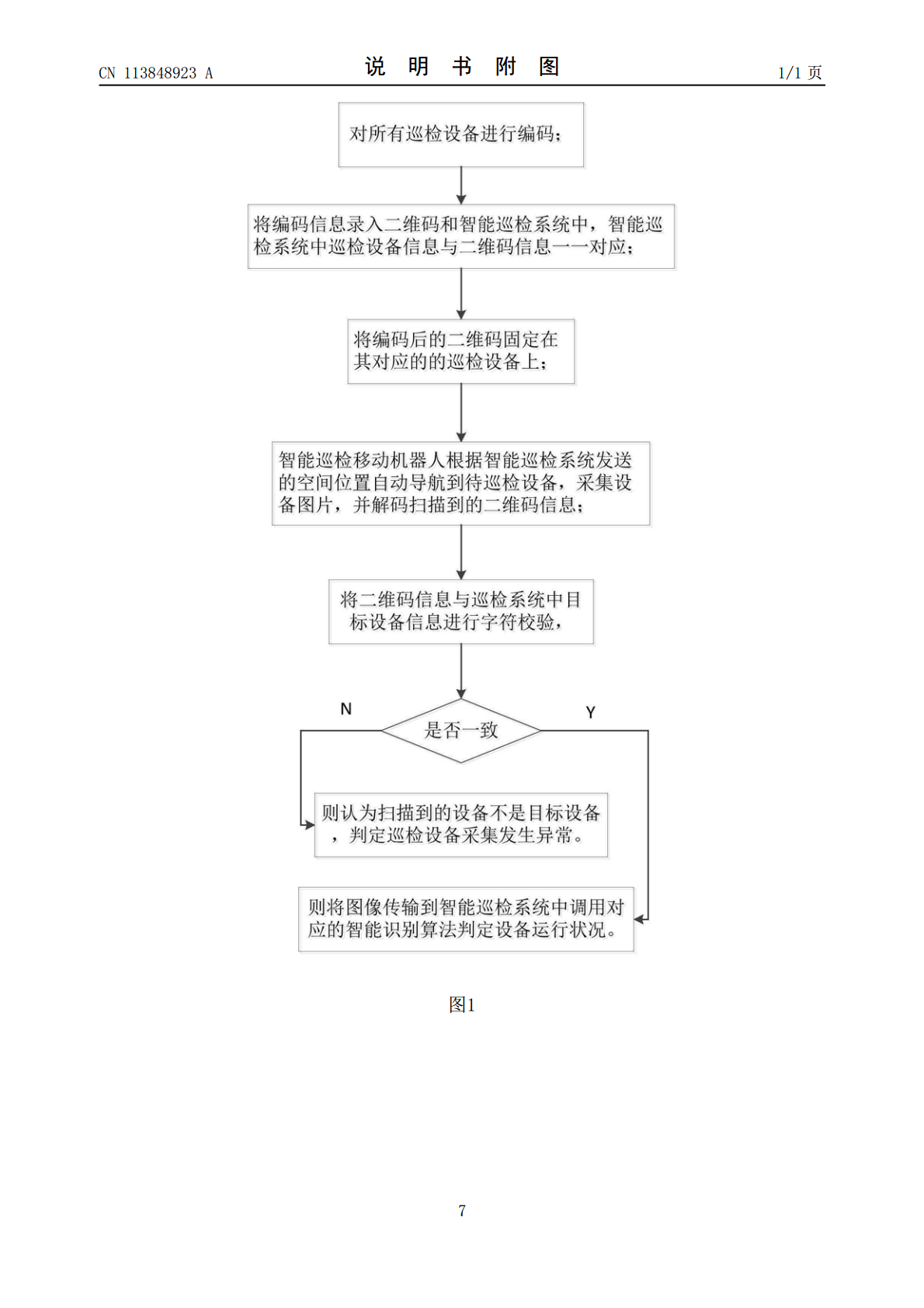
本发明公开了一种机器人自动巡检防误方法、系统、设备及存储介质,对所有巡检设备进行编码;将编码信息录入二维码和智能巡检系统中,智能巡检系统中巡检设备信息与二维码信息一一对应;将编码后的二维码固定在其对应的的巡检设备上;智能巡检移动机器人根据智能巡检系统发送的空间位置自动导航到待巡检设备,采集设备图片,并解码扫描到的二维码信息;将二维码信息与巡检系统中目标设备信息进行字符校验,若不一致,则认为扫描到的设备不是目标设备,判定巡检设备采集发生异常;若一致,则将图像传输到智能巡检系统中调用对应的智能识别算法判定设备
自动巡检方法、存储介质及巡检机器人.pdf
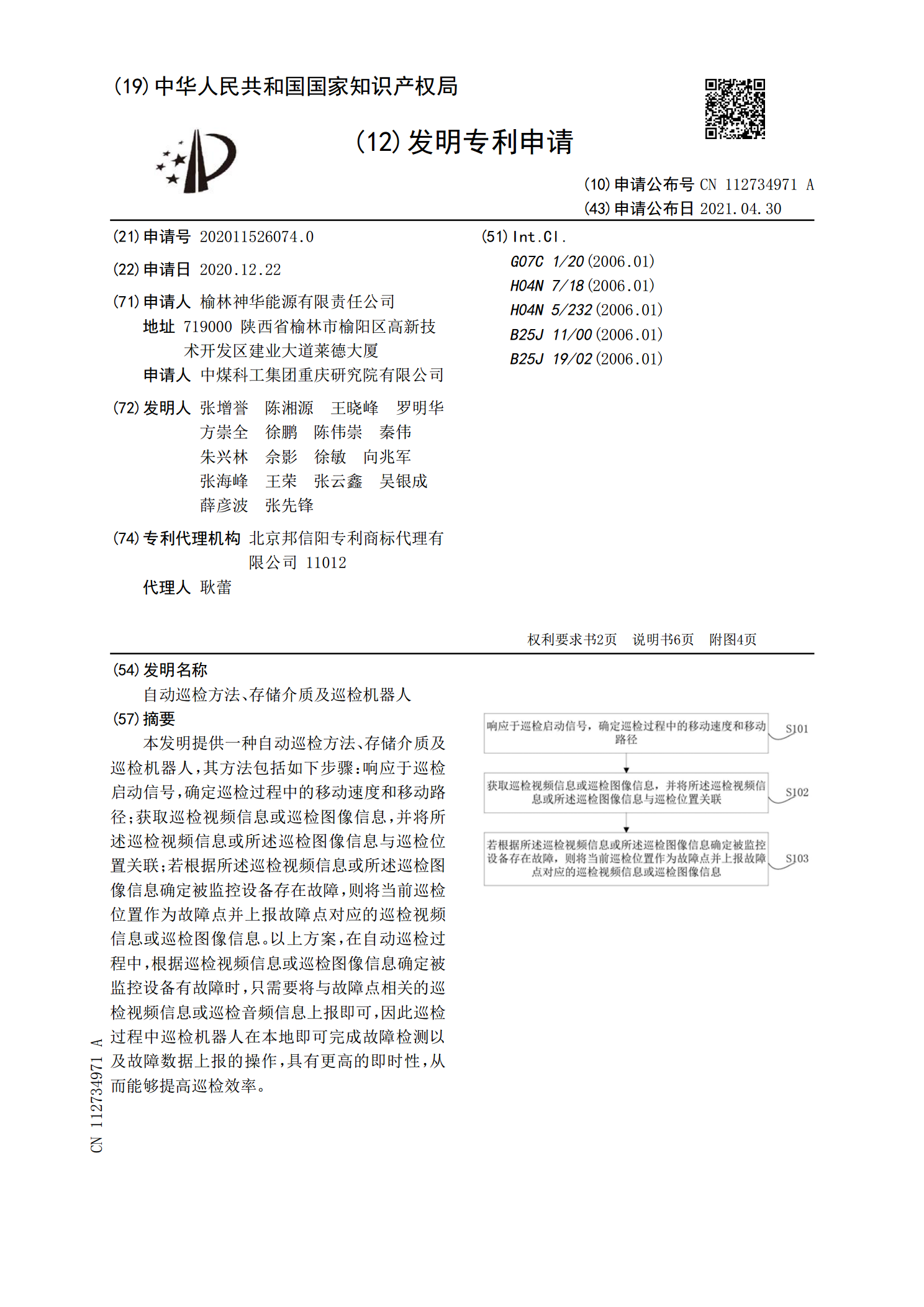
本发明提供一种自动巡检方法、存储介质及巡检机器人,其方法包括如下步骤:响应于巡检启动信号,确定巡检过程中的移动速度和移动路径;获取巡检视频信息或巡检图像信息,并将所述巡检视频信息或所述巡检图像信息与巡检位置关联;若根据所述巡检视频信息或所述巡检图像信息确定被监控设备存在故障,则将当前巡检位置作为故障点并上报故障点对应的巡检视频信息或巡检图像信息。以上方案,在自动巡检过程中,根据巡检视频信息或巡检图像信息确定被监控设备有故障时,只需要将与故障点相关的巡检视频信息或巡检音频信息上报即可,因此巡检过程中巡检机器
压板状态巡检方法、系统、机器人及存储介质.pdf
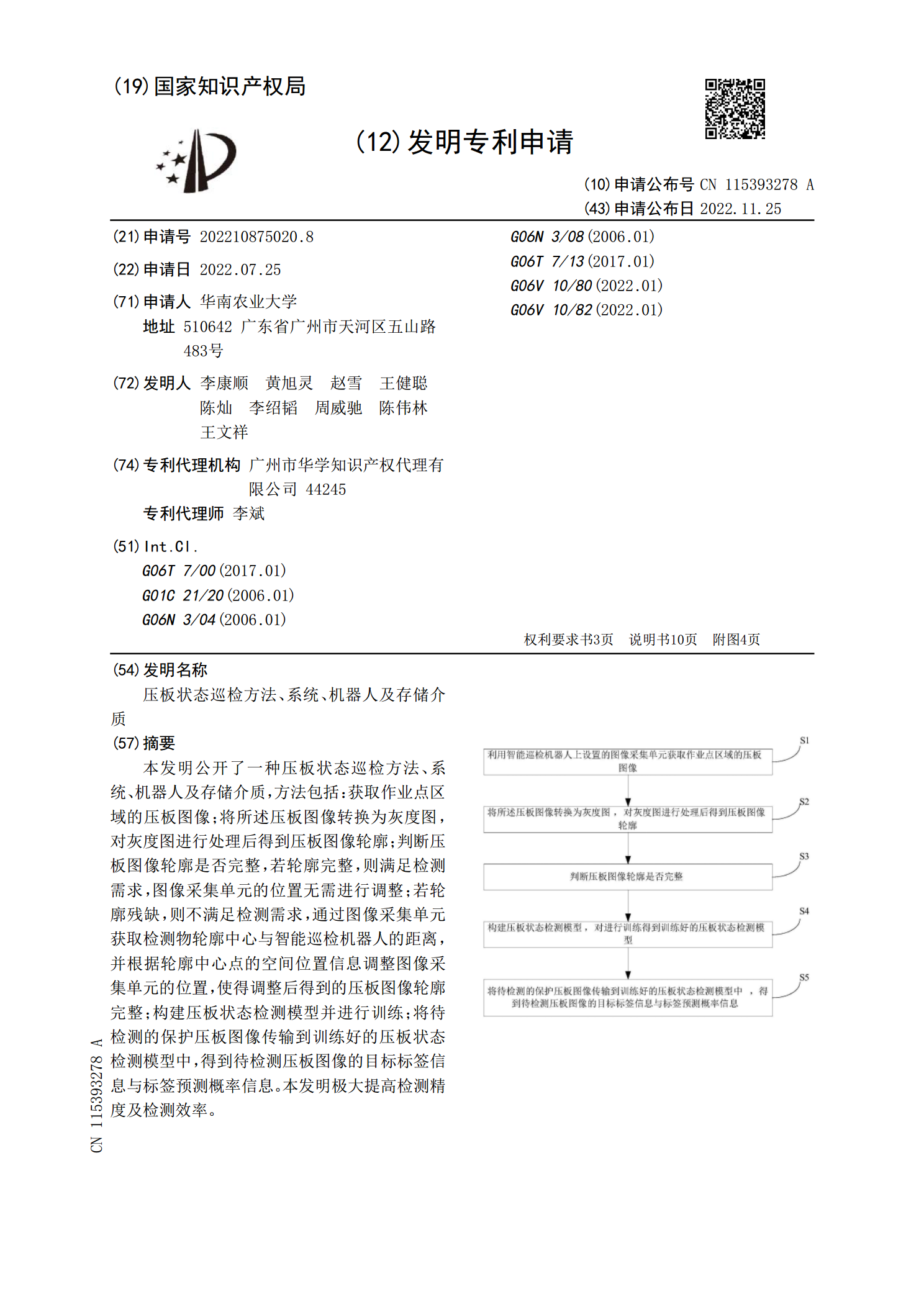
本发明公开了一种压板状态巡检方法、系统、机器人及存储介质,方法包括:获取作业点区域的压板图像;将所述压板图像转换为灰度图,对灰度图进行处理后得到压板图像轮廓;判断压板图像轮廓是否完整,若轮廓完整,则满足检测需求,图像采集单元的位置无需进行调整;若轮廓残缺,则不满足检测需求,通过图像采集单元获取检测物轮廓中心与智能巡检机器人的距离,并根据轮廓中心点的空间位置信息调整图像采集单元的位置,使得调整后得到的压板图像轮廓完整;构建压板状态检测模型并进行训练;将待检测的保护压板图像传输到训练好的压板状态检测模型中,得

一种防疫检查的机器人巡检系统、方法、设备及存储介质.pdf
本发明公开了一种防疫检查的机器人巡检方法、系统、设备及存储介质,所述系统包括:机器人主体、红外热成像仪、可见光成像仪、红外镜头、高清摄像头,所述机器人主体分别与所述高清摄像头、所述红外热成像仪、所述可见光成像仪、所述红外镜头通讯连接;所述机器人主体包括监控模块、控制模块、通信模块,所述控制模块通过所述通信模块与所述监控模块通讯连接,所述高清摄像头的输出端、所述红外热成像仪输出端、所述可见光成像仪输出端、所述红外镜头的输出端分别与所述控制模块的输入端通讯连接。本发明使得防疫目标检测流动起来,从整体上实现了巡
一种巡检方法、装置、设备、系统和存储介质.pdf
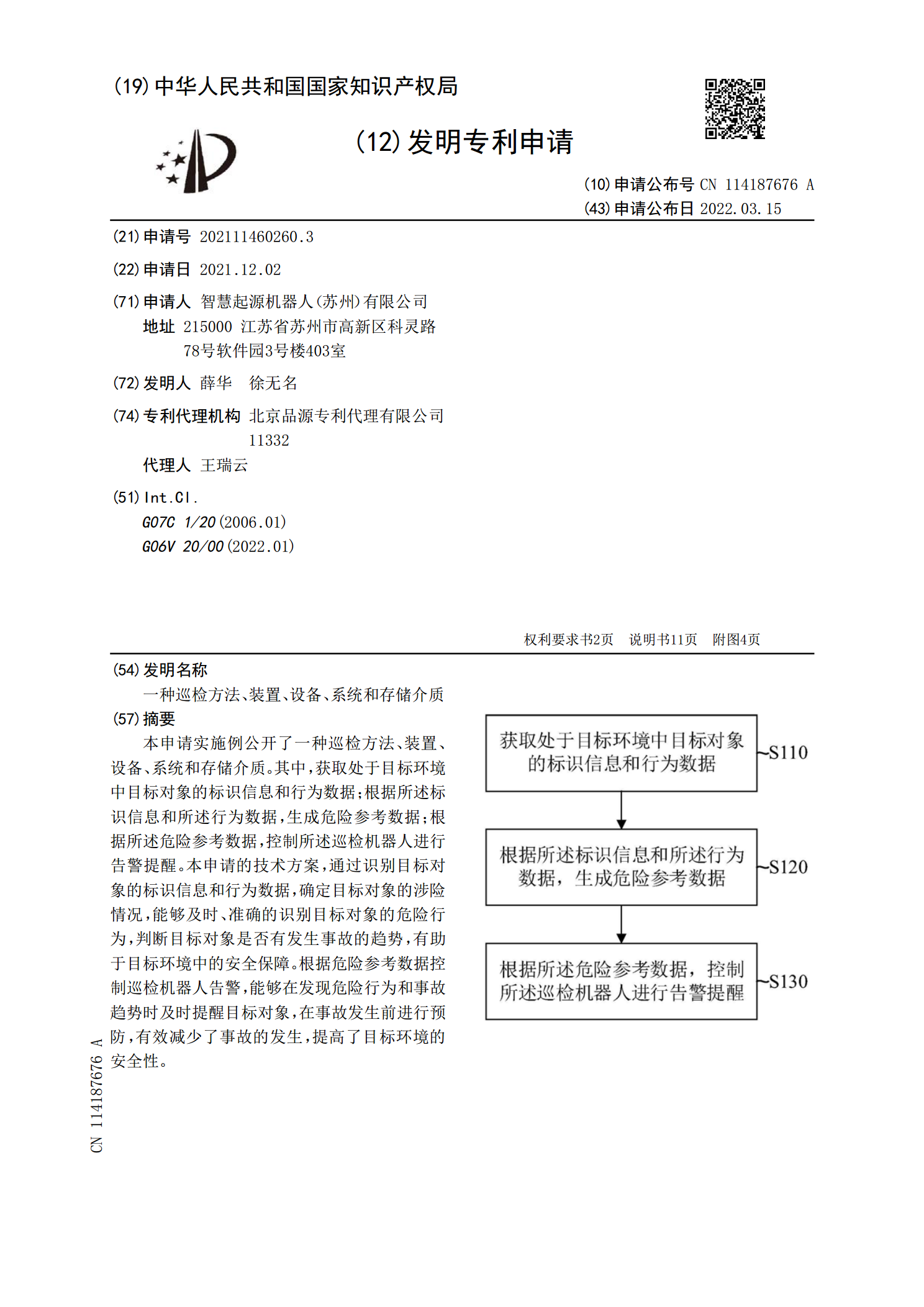
本申请实施例公开了一种巡检方法、装置、设备、系统和存储介质。其中,获取处于目标环境中目标对象的标识信息和行为数据;根据所述标识信息和所述行为数据,生成危险参考数据;根据所述危险参考数据,控制所述巡检机器人进行告警提醒。本申请的技术方案,通过识别目标对象的标识信息和行为数据,确定目标对象的涉险情况,能够及时、准确的识别目标对象的危险行为,判断目标对象是否有发生事故的趋势,有助于目标环境中的安全保障。根据危险参考数据控制巡检机器人告警,能够在发现危险行为和事故趋势时及时提醒目标对象,在事故发生前进行预防,有效