
一种域自适应的穿墙雷达人体姿态识别方法.pdf

小代****回来


1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种域自适应的穿墙雷达人体姿态识别方法.pdf
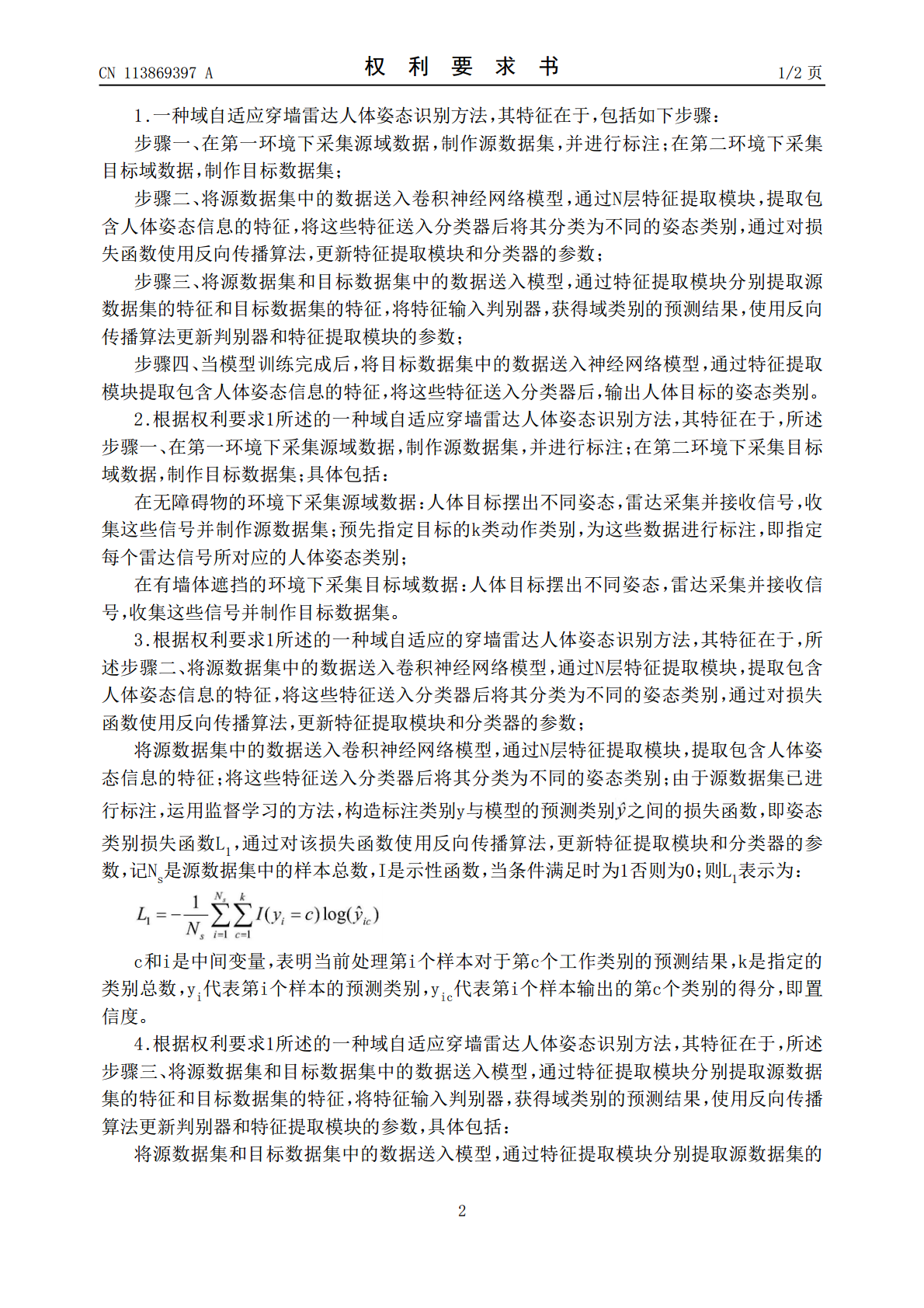
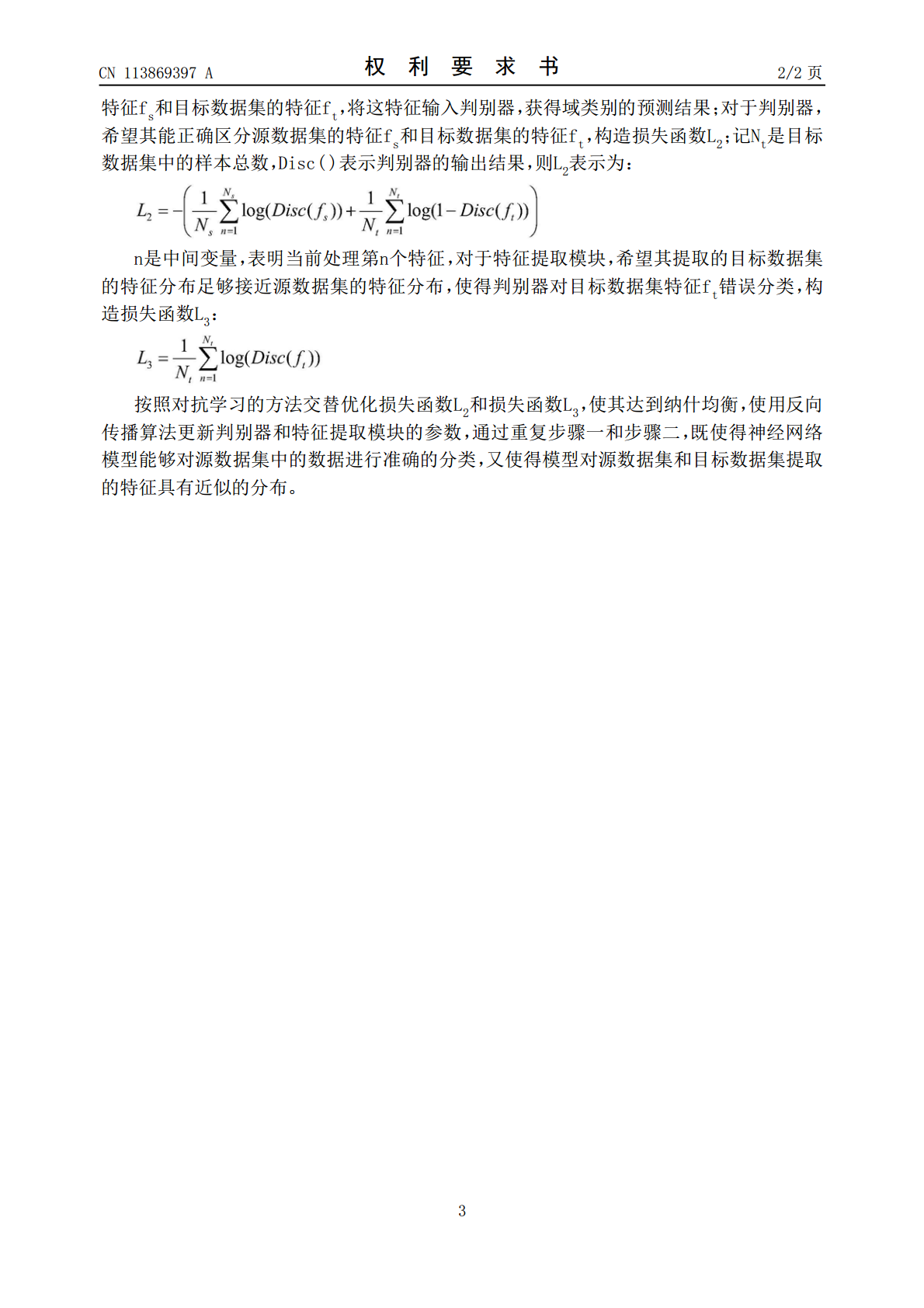
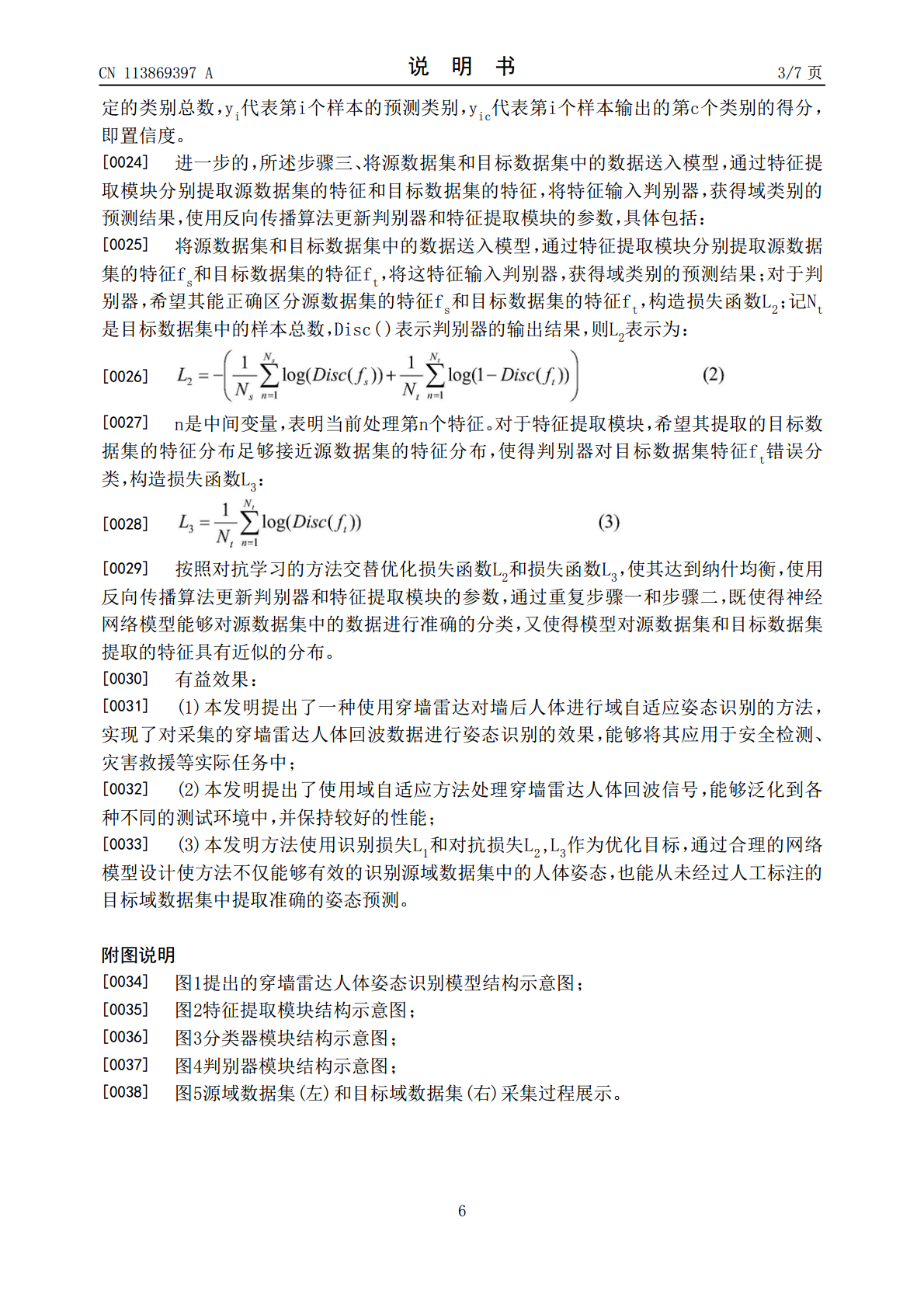
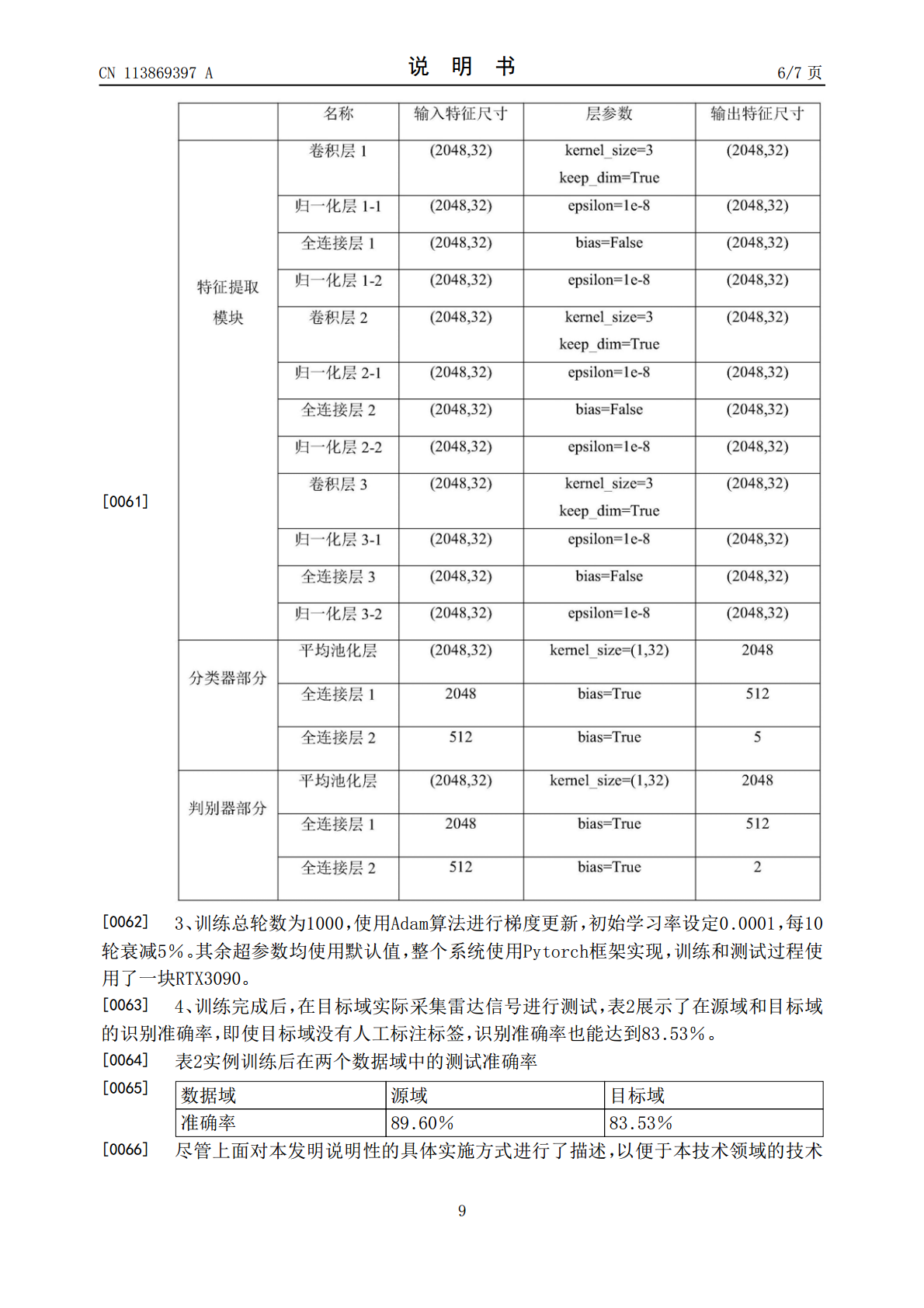
本发明涉及一种域自适应穿墙雷达人体姿态识别方法,包括如下步骤:步骤一、在第一环境下采集源域数据,制作源数据集,并进行标注;在第二环境下采集目标域数据,制作目标数据集;步骤二、将源数据集中的数据送入卷积神经网络模型,通过特征提取模块,提取包含人体姿态信息的特征,送入分类器后将其分类为不同的姿态类别,更新特征提取模块和分类器的参数;步骤三、将源数据集和目标数据集中的数据送入模型,通过特征提取模块分别提取源数据集的特征和目标数据集的特征,将特征输入判别器,获得域类别的预测结果,更新特征提取模块和判别器的参数;步
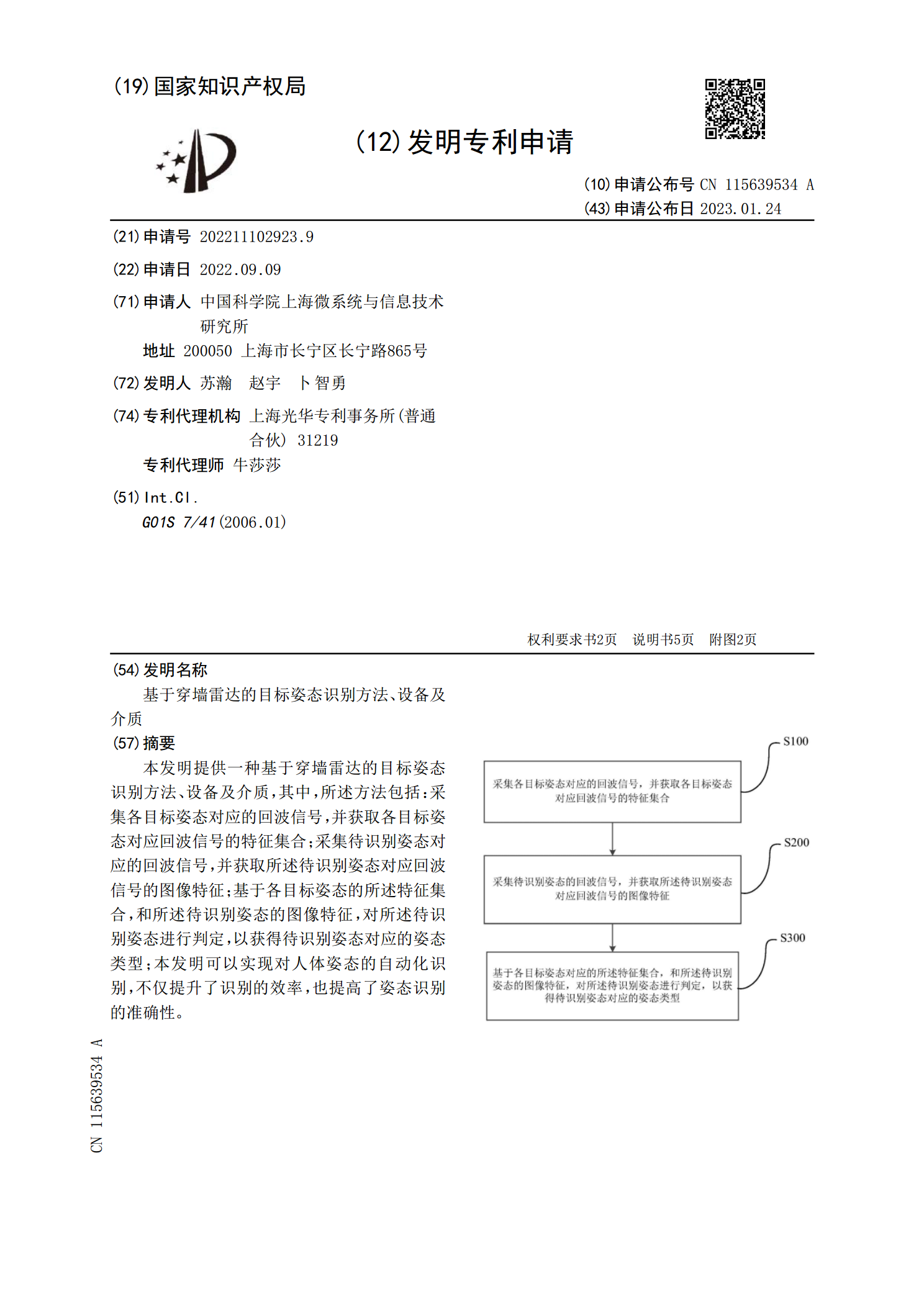
基于穿墙雷达的目标姿态识别方法、设备及介质.pdf
本发明提供一种基于穿墙雷达的目标姿态识别方法、设备及介质,其中,所述方法包括:采集各目标姿态对应的回波信号,并获取各目标姿态对应回波信号的特征集合;采集待识别姿态对应的回波信号,并获取所述待识别姿态对应回波信号的图像特征;基于各目标姿态的所述特征集合,和所述待识别姿态的图像特征,对所述待识别姿态进行判定,以获得待识别姿态对应的姿态类型;本发明可以实现对人体姿态的自动化识别,不仅提升了识别的效率,也提高了姿态识别的准确性。

基于穿墙雷达的动静人体目标自适应检测方法及系统.pdf
本发明公开了基于穿墙雷达的动静人体目标自适应检测方法及系统,涉及雷达检测技术领域。本发明包括以下步骤:SS01通过穿墙雷达和射频模块的混频和放大后得到基带信号;SS02采集32组数据并经过距离向傅里叶变换和多普勒向傅里叶变换,取模后进行对应距离单元上的多普勒向的累加;SS03运动人体的判断;SS04静止人体距离单元的转换;SS05静止人体的判断;SS06位置确定。本发明通过动目标检测算法和静目标检测算法能够分别对运动人体目标和静止人体目标进行检测,一方面提高了检测准确率,另一方面有效抑制了动目标对静止人体
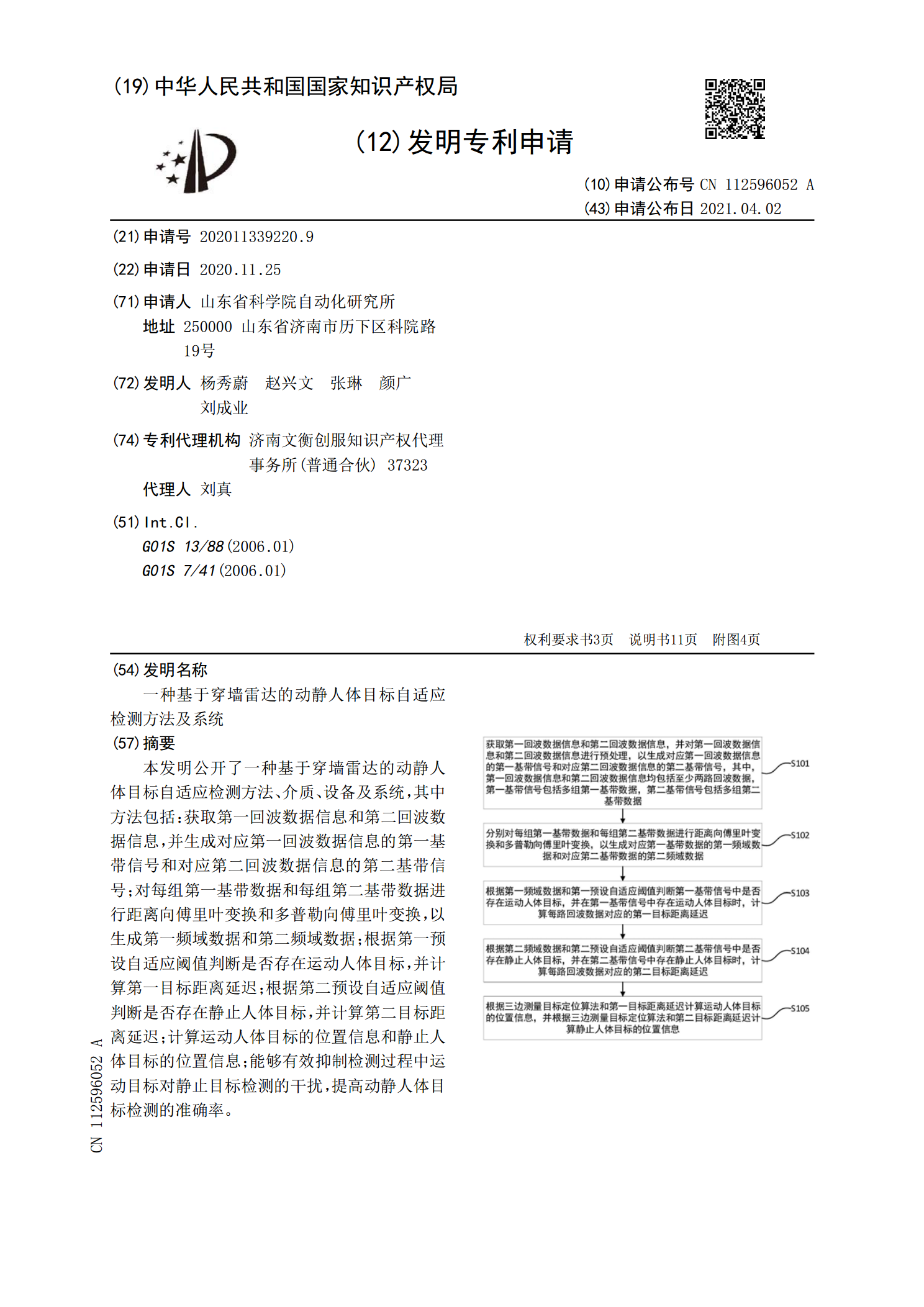
一种基于穿墙雷达的动静人体目标自适应检测方法及系统.pdf
本发明公开了一种基于穿墙雷达的动静人体目标自适应检测方法、介质、设备及系统,其中方法包括:获取第一回波数据信息和第二回波数据信息,并生成对应第一回波数据信息的第一基带信号和对应第二回波数据信息的第二基带信号;对每组第一基带数据和每组第二基带数据进行距离向傅里叶变换和多普勒向傅里叶变换,以生成第一频域数据和第二频域数据;根据第一预设自适应阈值判断是否存在运动人体目标,并计算第一目标距离延迟;根据第二预设自适应阈值判断是否存在静止人体目标,并计算第二目标距离延迟;计算运动人体目标的位置信息和静止人体目标的位置
利用毫米波雷达的人体姿态识别方法及存储介质.pdf
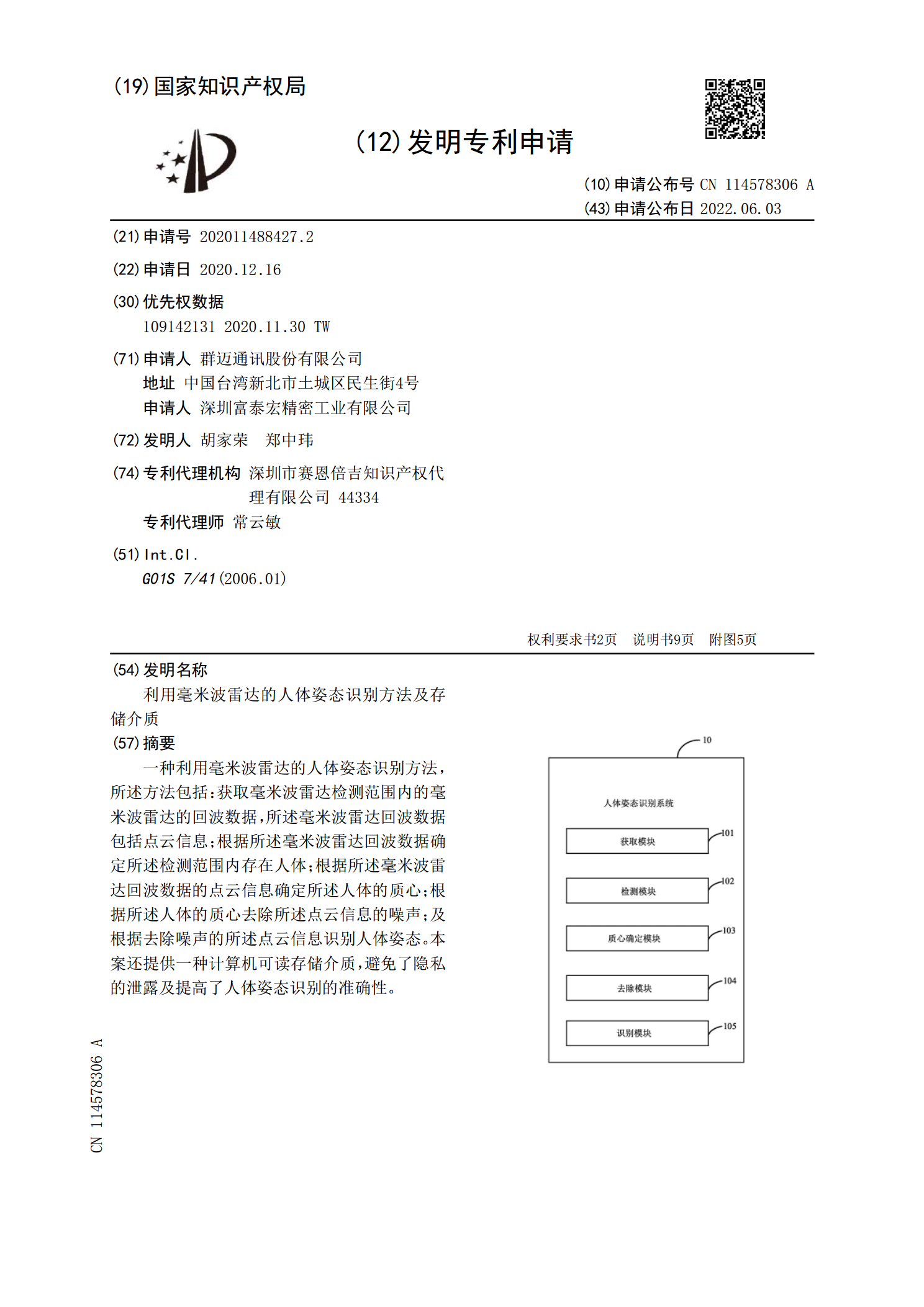
一种利用毫米波雷达的人体姿态识别方法,所述方法包括:获取毫米波雷达检测范围内的毫米波雷达的回波数据,所述毫米波雷达回波数据包括点云信息;根据所述毫米波雷达回波数据确定所述检测范围内存在人体;根据所述毫米波雷达回波数据的点云信息确定所述人体的质心;根据所述人体的质心去除所述点云信息的噪声;及根据去除噪声的所述点云信息识别人体姿态。本案还提供一种计算机可读存储介质,避免了隐私的泄露及提高了人体姿态识别的准确性。