
地图匹配定位方法、装置及存储介质.pdf

小寄****淑k


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
地图匹配定位方法、装置及存储介质.pdf
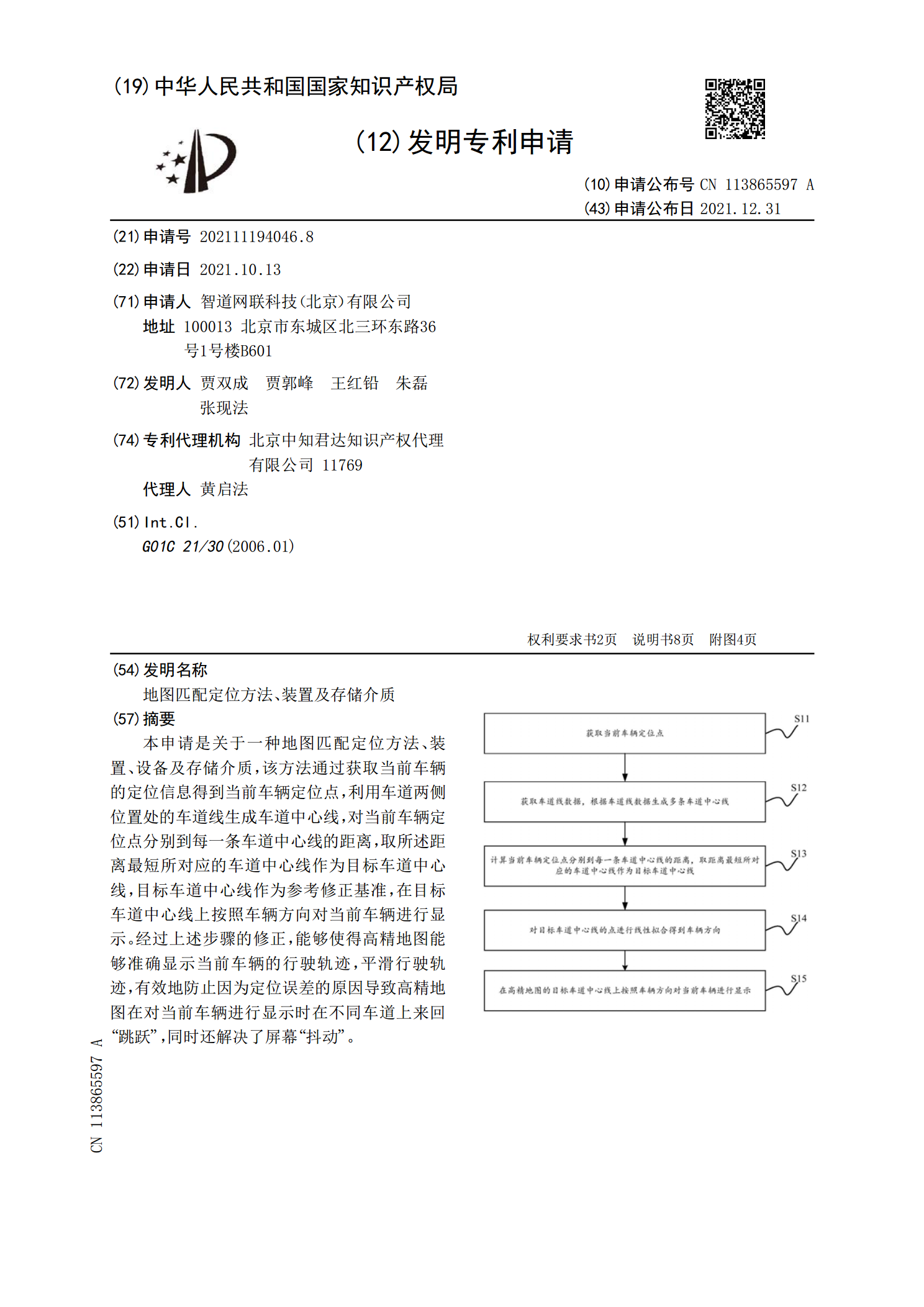
本申请是关于一种地图匹配定位方法、装置、设备及存储介质,该方法通过获取当前车辆的定位信息得到当前车辆定位点,利用车道两侧位置处的车道线生成车道中心线,对当前车辆定位点分别到每一条车道中心线的距离,取所述距离最短所对应的车道中心线作为目标车道中心线,目标车道中心线作为参考修正基准,在目标车道中心线上按照车辆方向对当前车辆进行显示。经过上述步骤的修正,能够使得高精地图能够准确显示当前车辆的行驶轨迹,平滑行驶轨迹,有效地防止因为定位误差的原因导致高精地图在对当前车辆进行显示时在不同车道上来回“跳跃”,同时还解决
模板匹配定位方法、装置、图像采集设备及存储介质.pdf
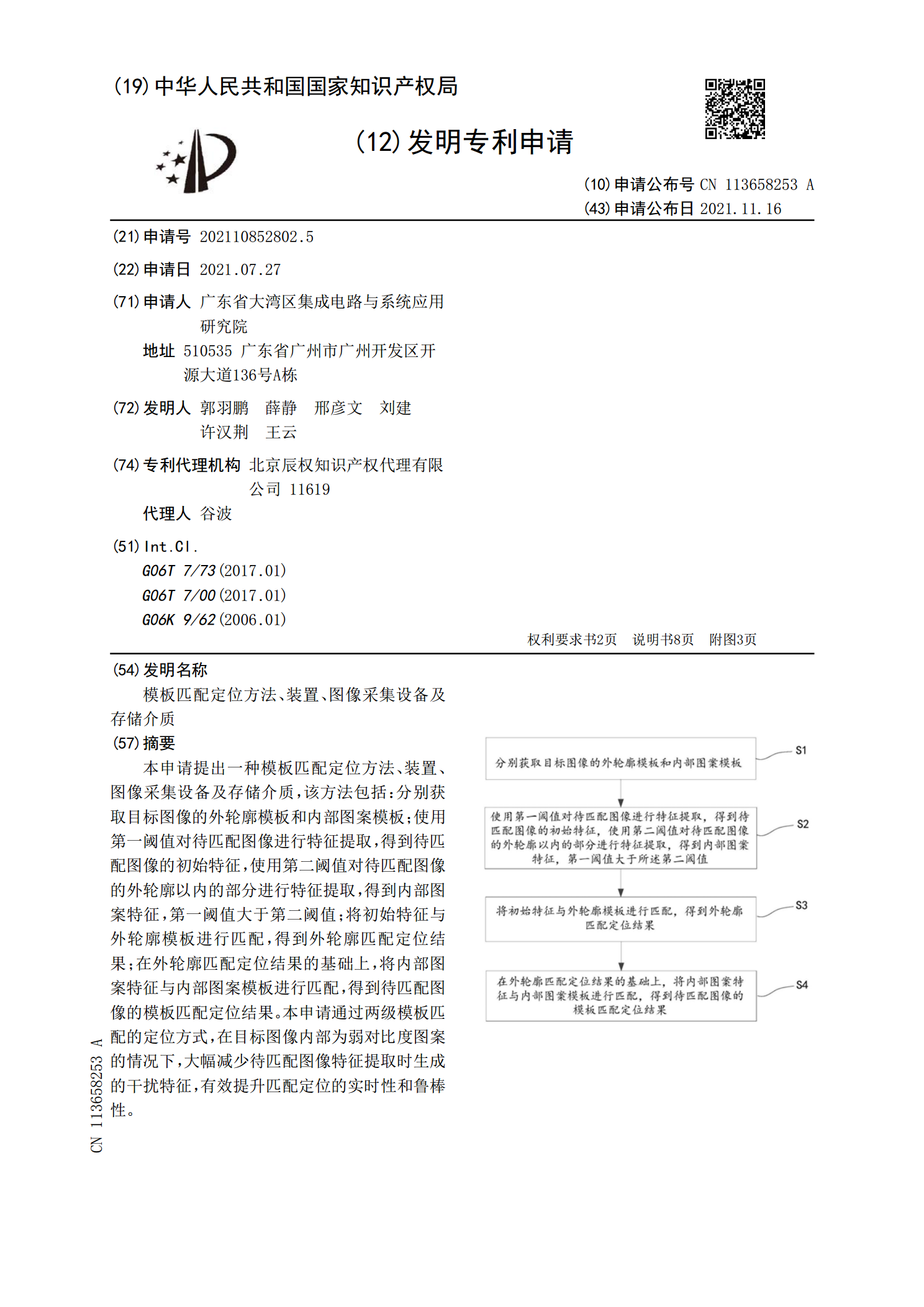
本申请提出一种模板匹配定位方法、装置、图像采集设备及存储介质,该方法包括:分别获取目标图像的外轮廓模板和内部图案模板;使用第一阈值对待匹配图像进行特征提取,得到待匹配图像的初始特征,使用第二阈值对待匹配图像的外轮廓以内的部分进行特征提取,得到内部图案特征,第一阈值大于第二阈值;将初始特征与外轮廓模板进行匹配,得到外轮廓匹配定位结果;在外轮廓匹配定位结果的基础上,将内部图案特征与内部图案模板进行匹配,得到待匹配图像的模板匹配定位结果。本申请通过两级模板匹配的定位方式,在目标图像内部为弱对比度图案的情况下,大

即时定位与地图构建方法、装置、终端设备及存储介质.pdf
本申请提供了一种即时定位与地图构建方法、装置、终端设备及存储介质。包括:将用户主动选取的图像帧作为最新关键帧加入关键帧序列;采用包含基于网格的运动统计算法与其他图像匹配算法的图像匹配策略,对最新关键帧与参考关键帧进行特征匹配,得到最新关键帧对应的特征匹配结果;根据最新关键帧对应的特征匹配结果生成环境地图及运动轨迹。用户能够主动选择确定最新关键帧,使得确定出的关键帧更具有代表性,提升后续依赖关键帧进行的定位和建图的精度,还能采用包含基于网格的运动统计算法和其他图像匹配算法的图像匹配策略对最新关键帧进行匹配,
地图构建方法、装置及存储介质.pdf
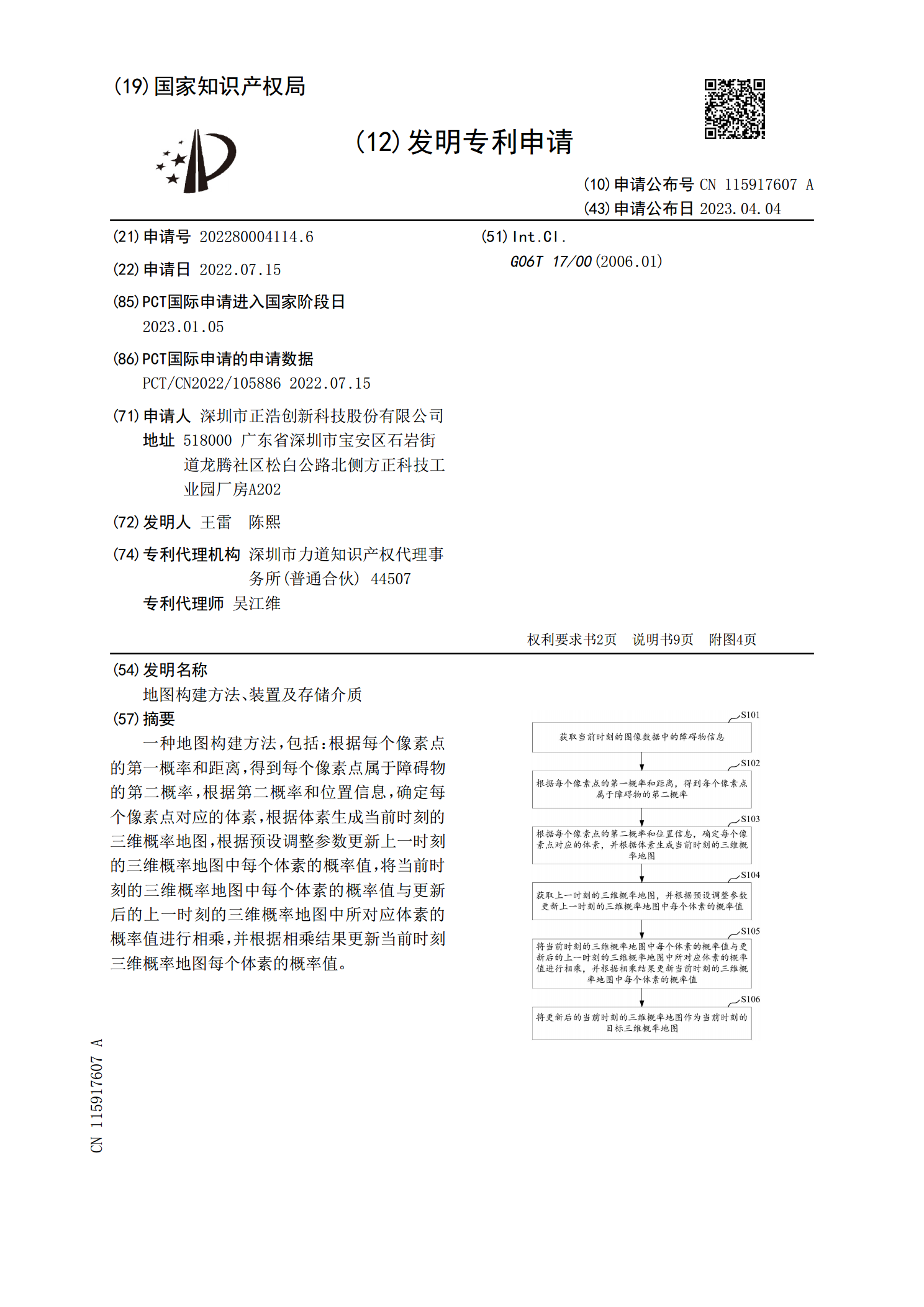
一种地图构建方法,包括:根据每个像素点的第一概率和距离,得到每个像素点属于障碍物的第二概率,根据第二概率和位置信息,确定每个像素点对应的体素,根据体素生成当前时刻的三维概率地图,根据预设调整参数更新上一时刻的三维概率地图中每个体素的概率值,将当前时刻的三维概率地图中每个体素的概率值与更新后的上一时刻的三维概率地图中所对应体素的概率值进行相乘,并根据相乘结果更新当前时刻三维概率地图每个体素的概率值。
文本匹配方法、装置及存储介质.pdf
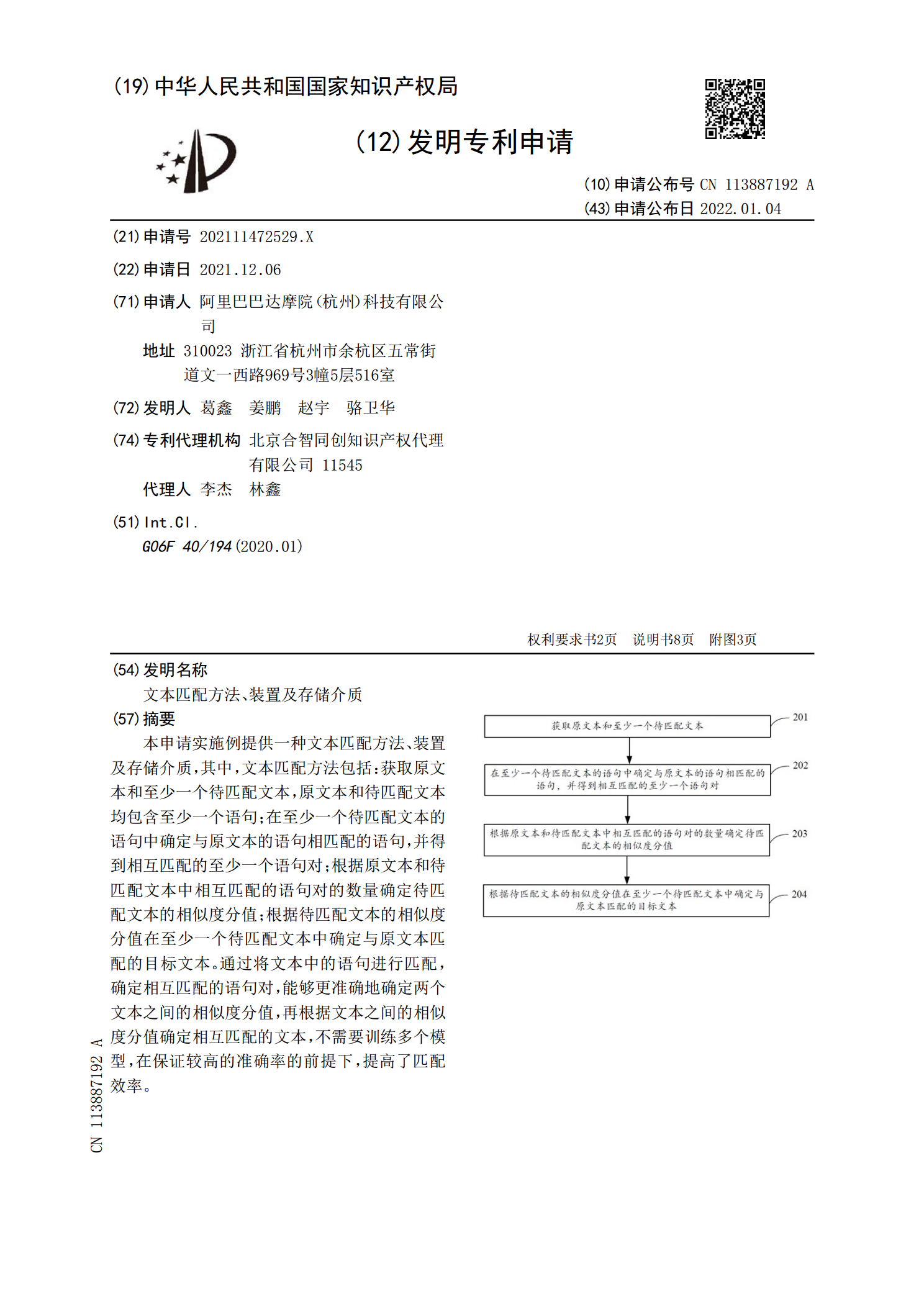
本申请实施例提供一种文本匹配方法、装置及存储介质,其中,文本匹配方法包括:获取原文本和至少一个待匹配文本,原文本和待匹配文本均包含至少一个语句;在至少一个待匹配文本的语句中确定与原文本的语句相匹配的语句,并得到相互匹配的至少一个语句对;根据原文本和待匹配文本中相互匹配的语句对的数量确定待匹配文本的相似度分值;根据待匹配文本的相似度分值在至少一个待匹配文本中确定与原文本匹配的目标文本。通过将文本中的语句进行匹配,确定相互匹配的语句对,能够更准确地确定两个文本之间的相似度分值,再根据文本之间的相似度分值确定相