
基于SMA弹簧驱动的柔性机器臂切换控制方法及系统.pdf

慧颖****23

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于SMA弹簧驱动的柔性机器臂切换控制方法及系统.pdf
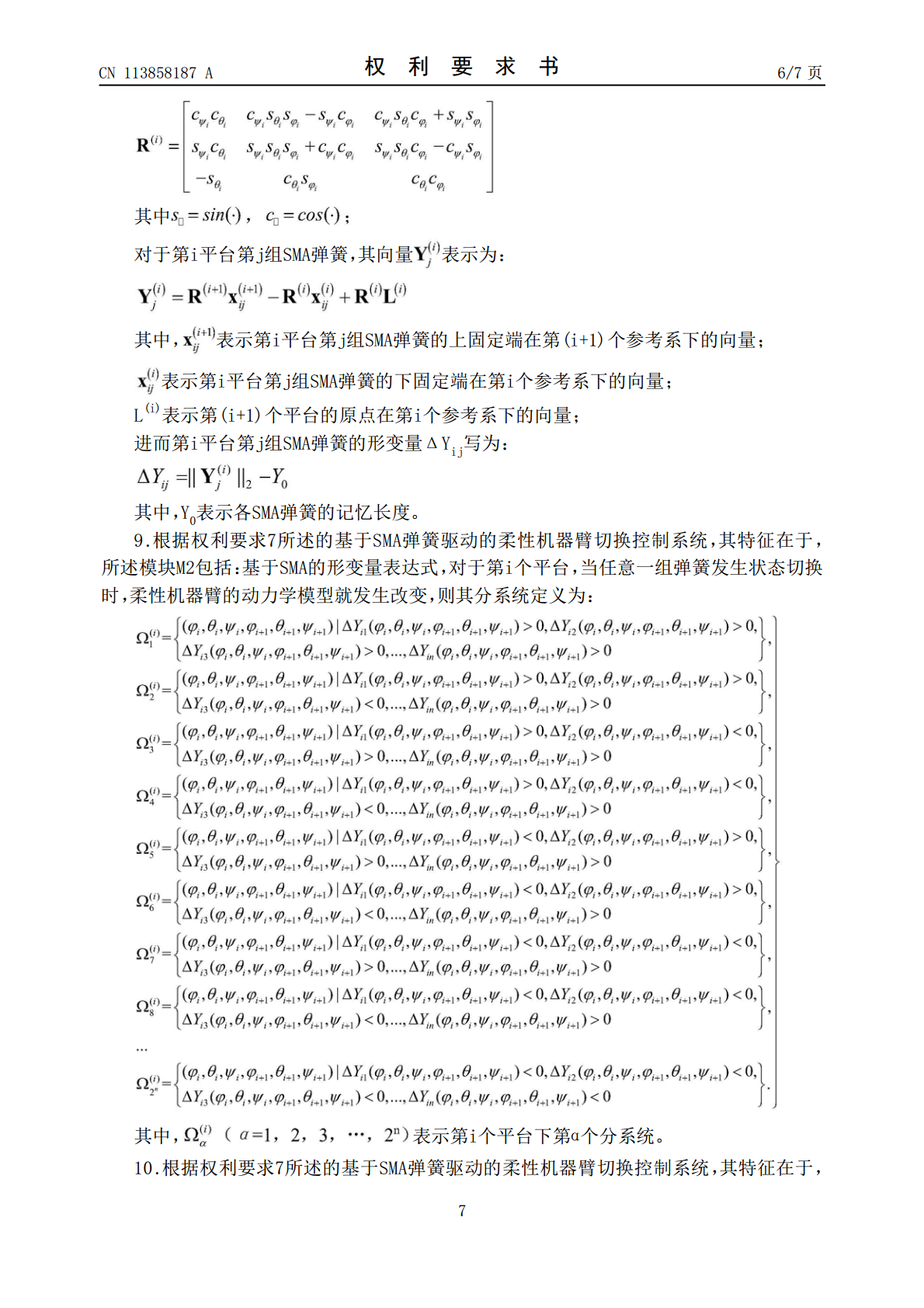
本发明提供了一种基于SMA弹簧驱动的柔性机器臂切换控制方法及系统,涉及柔性机器臂控制技术领域,该方法包括:步骤S1:获取SMA弹簧向量表达式并计算数值;步骤S2:根据计算数值,对分系统、边界、切换集以及映射进行辨识;步骤S3:引入物理约束,判断所述分系统数目及当前所处分系统;步骤S4:实时监测各平台位姿向量,在发生系统切换时,输出当前分系统,为控制方法提供参考。本发明能够解决基于SMA弹簧驱动的柔性机器臂切换系统认知不足的问题,可避免由于系统切换而控制方案变更不及时,系统失控或失稳现象的发生。

基于SMA驱动的柔性机器臂失稳抑制方法和系统.pdf
本发明提供了一种基于SMA驱动的柔性机器臂失稳抑制方法和系统,包括:步骤1:分析SMA的本构特性,及其引入的输出力不连续特性对系统动力学的影响;步骤2:结合柔性机器臂的物理构型,构建普适的状态方程;步骤3:引入轨迹约束条件,对参考轨迹加以规划,输出期望轨迹;步骤4:结合得到的状态方程与期望轨迹,重构误差动力学方程,并设计滑模控制面和滑模趋近律,给定多输入多输出系统MIMO的SMA滑模控制量,在满足轨迹跟踪精度要求时,输出MIMO时序控制量。本发明通过轨迹约束方法,能有效避免由系统参数不确定引发的控制算法失
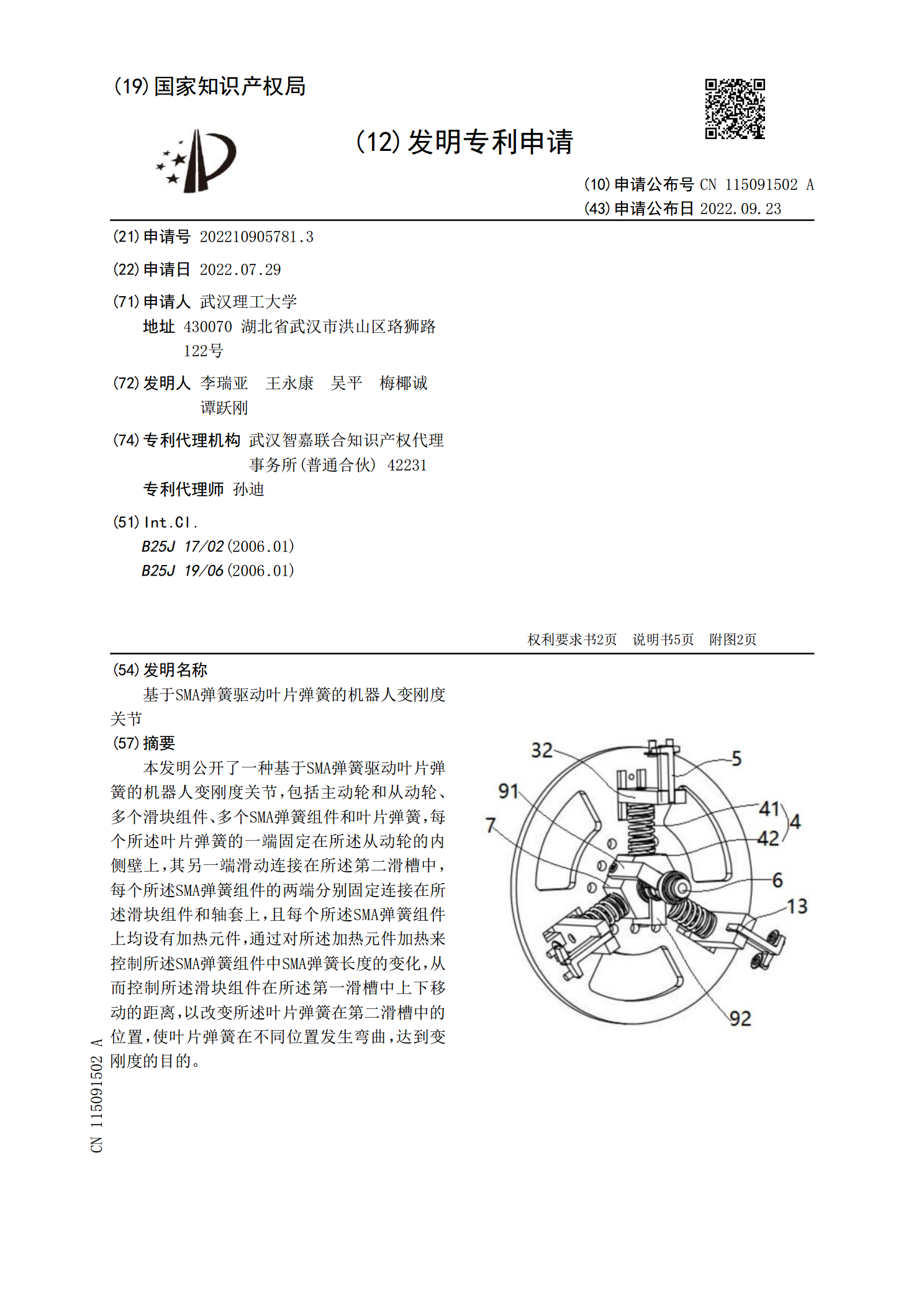
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf
本发明公开了一种基于SMA弹簧驱动叶片弹簧的机器人变刚度关节,包括主动轮和从动轮、多个滑块组件、多个SMA弹簧组件和叶片弹簧,每个所述叶片弹簧的一端固定在所述从动轮的内侧壁上,其另一端滑动连接在所述第二滑槽中,每个所述SMA弹簧组件的两端分别固定连接在所述滑块组件和轴套上,且每个所述SMA弹簧组件上均设有加热元件,通过对所述加热元件加热来控制所述SMA弹簧组件中SMA弹簧长度的变化,从而控制所述滑块组件在所述第一滑槽中上下移动的距离,以改变所述叶片弹簧在第二滑槽中的位置,使叶片弹簧在不同位置发生弯曲,达到

基于SMA柔性驱动模块仿生水母机器人系统研究.docx
基于SMA柔性驱动模块仿生水母机器人系统研究基于SMA柔性驱动模块仿生水母机器人系统研究摘要随着科技的不断进步和人们对于海洋环境的关注增加,仿生水母机器人逐渐成为研究的热点。本文以SMA(ShapeMemoryAlloy)柔性驱动模块为基础,研究了仿生水母机器人的系统设计和性能优化。通过分析水母的运动特点和生物结构,设计了一种基于SMA柔性驱动模块的仿生水母机器人系统,并进行了仿真实验和性能测试。结果表明,该系统能够实现水母式的运动和灵活的机动性,具备良好的稳定性和适应性,有着广阔的应用前景。关键词:仿生
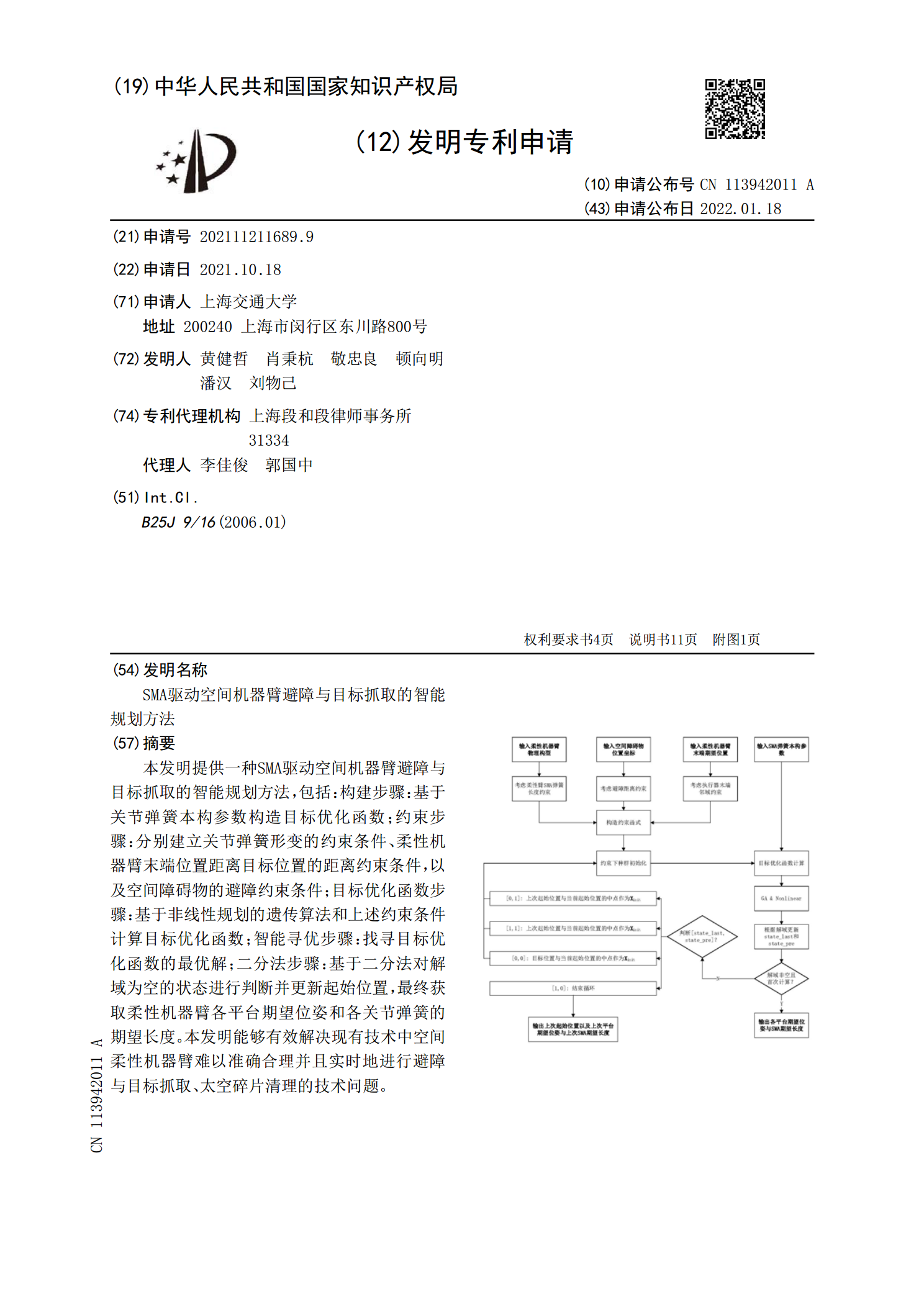
SMA驱动空间机器臂避障与目标抓取的智能规划方法.pdf
本发明提供一种SMA驱动空间机器臂避障与目标抓取的智能规划方法,包括:构建步骤:基于关节弹簧本构参数构造目标优化函数;约束步骤:分别建立关节弹簧形变的约束条件、柔性机器臂末端位置距离目标位置的距离约束条件,以及空间障碍物的避障约束条件;目标优化函数步骤:基于非线性规划的遗传算法和上述约束条件计算目标优化函数;智能寻优步骤:找寻目标优化函数的最优解;二分法步骤:基于二分法对解域为空的状态进行判断并更新起始位置,最终获取柔性机器臂各平台期望位姿和各关节弹簧的期望长度。本发明能够有效解决现有技术中空间柔性机器臂