
SMA驱动空间机器臂避障与目标抓取的智能规划方法.pdf

小云****66

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
SMA驱动空间机器臂避障与目标抓取的智能规划方法.pdf
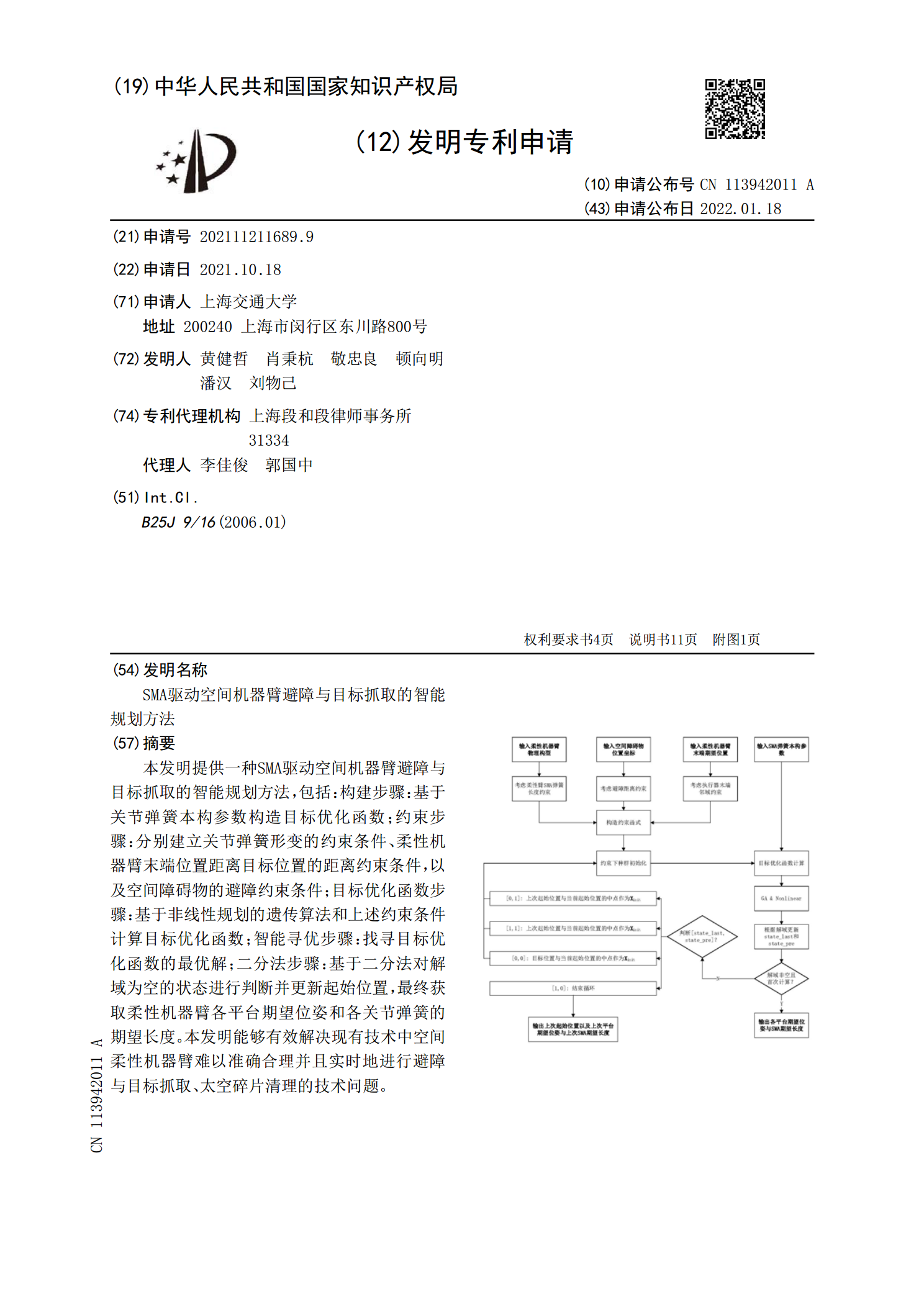
本发明提供一种SMA驱动空间机器臂避障与目标抓取的智能规划方法,包括:构建步骤:基于关节弹簧本构参数构造目标优化函数;约束步骤:分别建立关节弹簧形变的约束条件、柔性机器臂末端位置距离目标位置的距离约束条件,以及空间障碍物的避障约束条件;目标优化函数步骤:基于非线性规划的遗传算法和上述约束条件计算目标优化函数;智能寻优步骤:找寻目标优化函数的最优解;二分法步骤:基于二分法对解域为空的状态进行判断并更新起始位置,最终获取柔性机器臂各平台期望位姿和各关节弹簧的期望长度。本发明能够有效解决现有技术中空间柔性机器臂

空间机器人智能避障运动规划研究.docx
空间机器人智能避障运动规划研究空间机器人智能避障运动规划研究摘要:随着科技的不断发展,空间机器人在各种任务中的应用越来越广泛。然而,由于环境的复杂性和未知因素的存在,空间机器人在移动过程中可能会面临各种障碍。因此,空间机器人的智能避障运动规划成为研究的热点之一。本论文旨在探讨空间机器人智能避障运动规划的方法和技术,并结合实例介绍其应用价值。关键词:空间机器人;智能避障;运动规划1.引言空间机器人是能够在宇宙和行星等恶劣环境下工作的机器人系统,具有探索和执行复杂任务的能力。然而,由于空间环境的复杂性和不确定

机械臂避障规划及视觉伺服抓取的开题报告.docx
机械臂避障规划及视觉伺服抓取的开题报告一、研究背景机械臂避障规划和视觉伺服抓取技术是现代工业自动化领域的重要研究方向。随着机器人技术的不断发展,机械臂已经广泛应用于多种场合,如制造业、医疗器械、仓储物流等领域。然而,机械臂在工作过程中需要避免与周围环境产生冲突,而且需要准确抓取目标物体。这就需要针对具体场景进行避障规划和视觉伺服抓取的设计。机械臂避障规划是指机械臂在工作过程中避免碰撞和防止无效运动的路径规划。这是一个应用广泛的问题,涉及到目标检测、运动规划、控制器设计等多个领域。视觉伺服抓取技术是指利用机
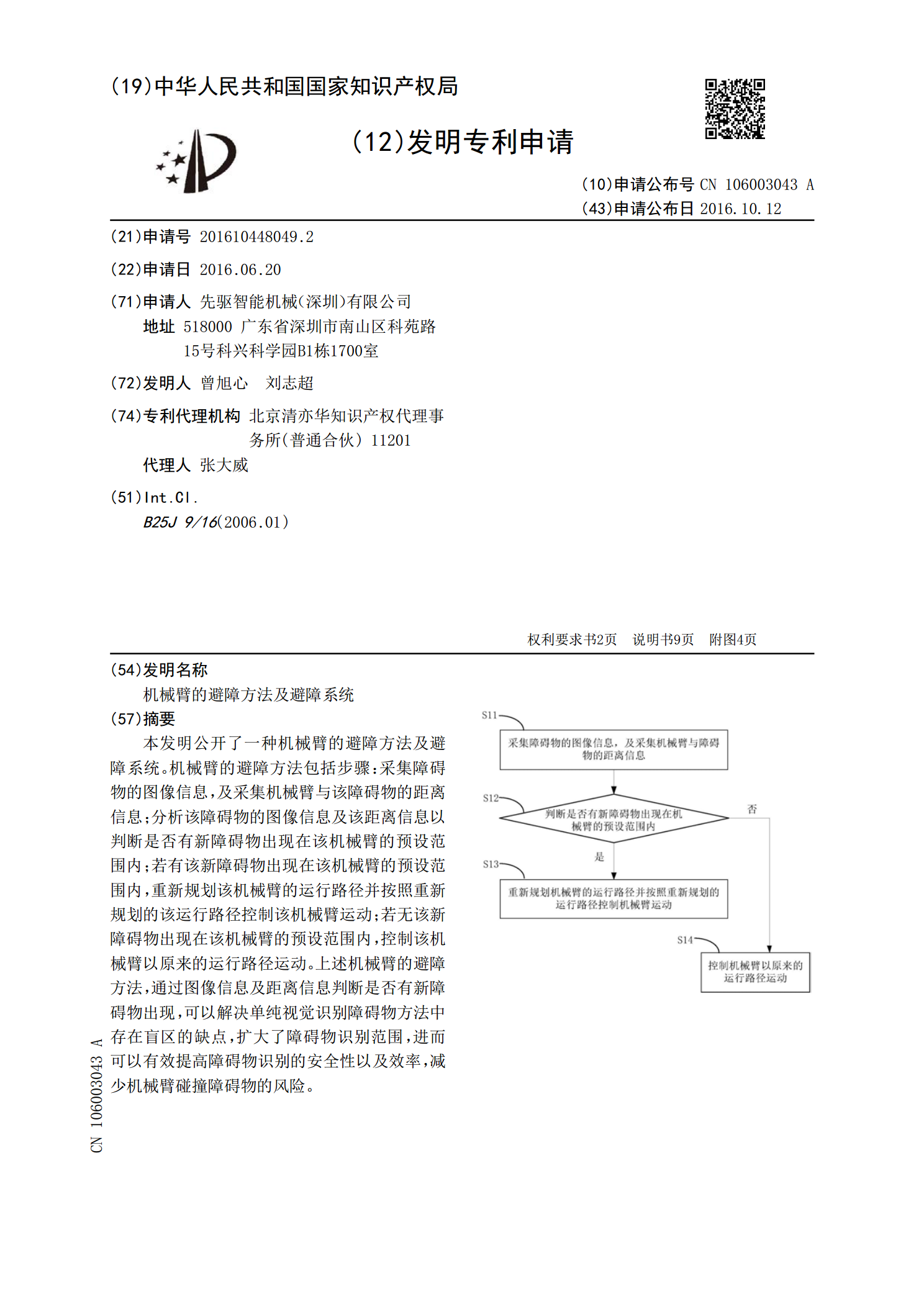
机械臂的避障方法及避障系统.pdf
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点

基于最小代价下降的机械臂关节空间避障路径规划方法.pdf
本发明基于最小代价下降的机械臂关节空间避障路径规划方法,先在机械臂末端空间中生成一组初始点至目标点之间的辅助路径点,然后根据末端点插值密度对每一分段路径进行线性插值处理,得到插值后的多分段路径,再基于最小代价下降对插值后的多分段路径进行关节空间避障路径规划,得到初始点至目标点的所有关节角组合;最后使用多项式对生成的所有关节角组合中相邻两个关节角组合之间进行插值,得到多项式插值后的关节角组合,使得机械臂能够基于该关节角组合从初始点平稳地、无碰撞地运动到目标点。本发明仅仅使用正运动学,计算简单。