
基于事件相机的目标检测与跟踪方法、系统和存储介质.pdf

一吃****成益


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于事件相机的目标检测与跟踪方法、系统和存储介质.pdf
本发明提供了一种基于事件相机的目标检测与跟踪方法、系统和存储介质。该方法包括:读取DVS事件序列,进行背景降噪处理;设置时间窗;初始化卡尔曼滤波的参数;把时间窗内的DVS事件序列转为归一化平均时间面;在归一化平均时间面中,进行目标事件去噪;检测目标的位置,同时采用卡尔曼滤波预测目标位置,但初始位置由检测来决定;计算当前时刻检测到的目标位置与上一时刻目标位置的距离,根据距离信息平衡检测位置与卡尔曼滤波预测的位置,从而决定当前时刻目标的位置;进行轨迹平滑;移动到下一时间窗重复上述步骤,直至DVS事件序列结束。
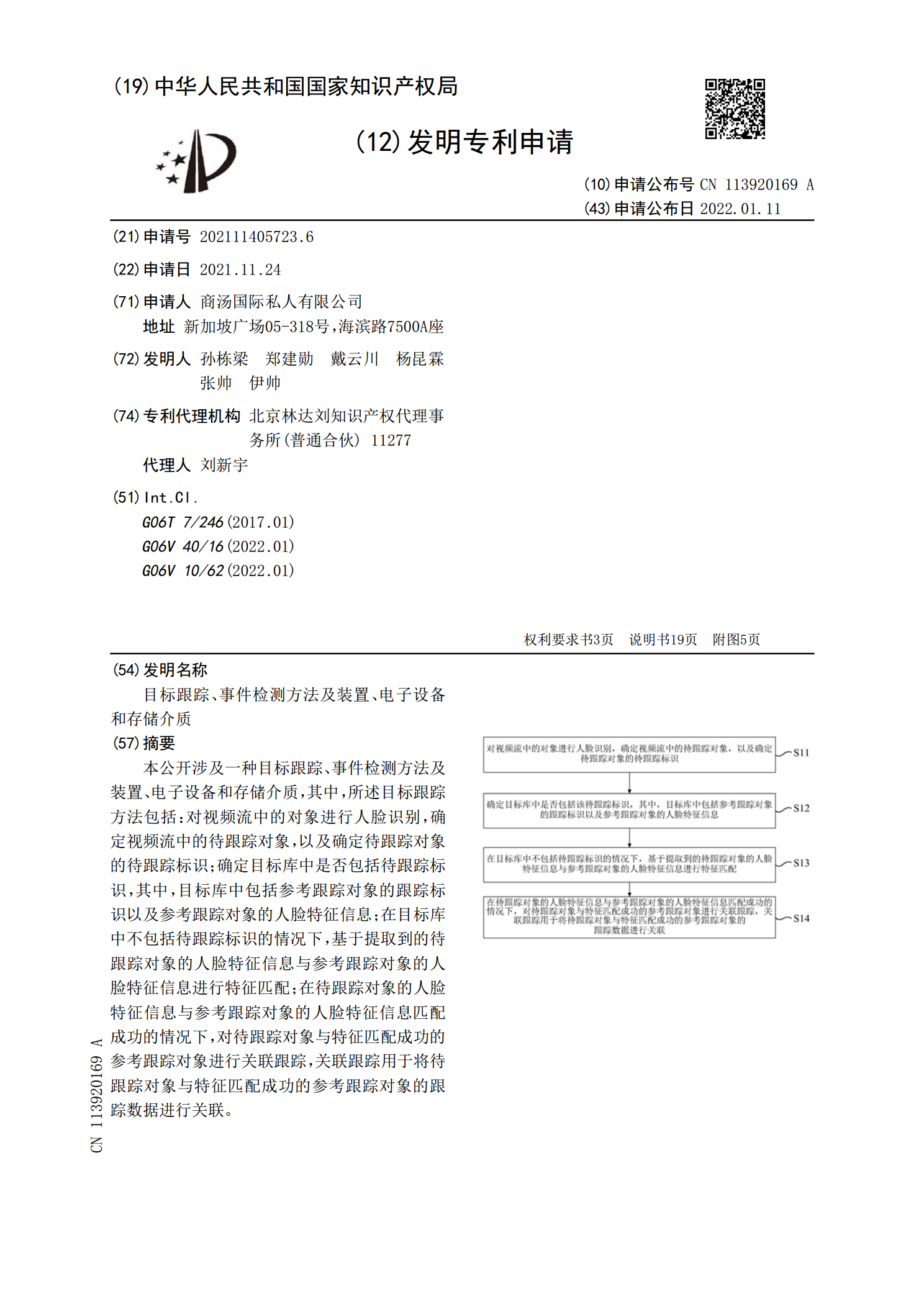
目标跟踪、事件检测方法及装置、电子设备和存储介质.pdf
本公开涉及一种目标跟踪、事件检测方法及装置、电子设备和存储介质,其中,所述目标跟踪方法包括:对视频流中的对象进行人脸识别,确定视频流中的待跟踪对象,以及确定待跟踪对象的待跟踪标识;确定目标库中是否包括待跟踪标识,其中,目标库中包括参考跟踪对象的跟踪标识以及参考跟踪对象的人脸特征信息;在目标库中不包括待跟踪标识的情况下,基于提取到的待跟踪对象的人脸特征信息与参考跟踪对象的人脸特征信息进行特征匹配;在待跟踪对象的人脸特征信息与参考跟踪对象的人脸特征信息匹配成功的情况下,对待跟踪对象与特征匹配成功的参考跟踪对象

基于双目相机的距离测试方法、装置、系统和存储介质.pdf
本发明公开了一种基于双目相机的距离测试方法、装置、系统和存储介质,该方法首先获取双目相机在预设图像范围内的盲区位置,判定待测目标处于盲区位置时,则采用单目对所述待测目标测距,并输出单目测距得到的测距结果;在判定所述待测目标不处于盲区位置时,则采用单目和双目对所述待测目标分别测距,并将获得的单目测距结果与双目测距结果进行权重计算后,得到并输出综合测距结果。该方法融合了双目视差测距原理和单目测距原理的各自优点,利用单双目结合测距,提高了测距精度,从而解决了传统双目相机在障碍物距离检测时受限于盲区而导致的测距精

基于事件相机的跟踪方法.pdf
基于事件相机的跟踪方法,涉及图像跟踪技术领域,解决现有图像的目标跟踪方法存在对高速运动目标成像时会产生运动模糊现象,方法计算过程中存在数据冗余以及传感器分辨率低,事件流输出速率低等问题,本发明首先对原始事件流进行降噪,去掉影响目标检测的噪点,然后将事件流以固定时间切片,之后将目标的事件簇提取,获取目标位置和时间等信息;最后对新获得目标与跟踪器中的目标进行匹配,获取目标的新位置,完成目标轨迹的跟踪。本发明对一个时间段内的事件进行批量处理,获得事件簇的位置并标注标签,再进行下一时间段内的目标位置检测,这样的方
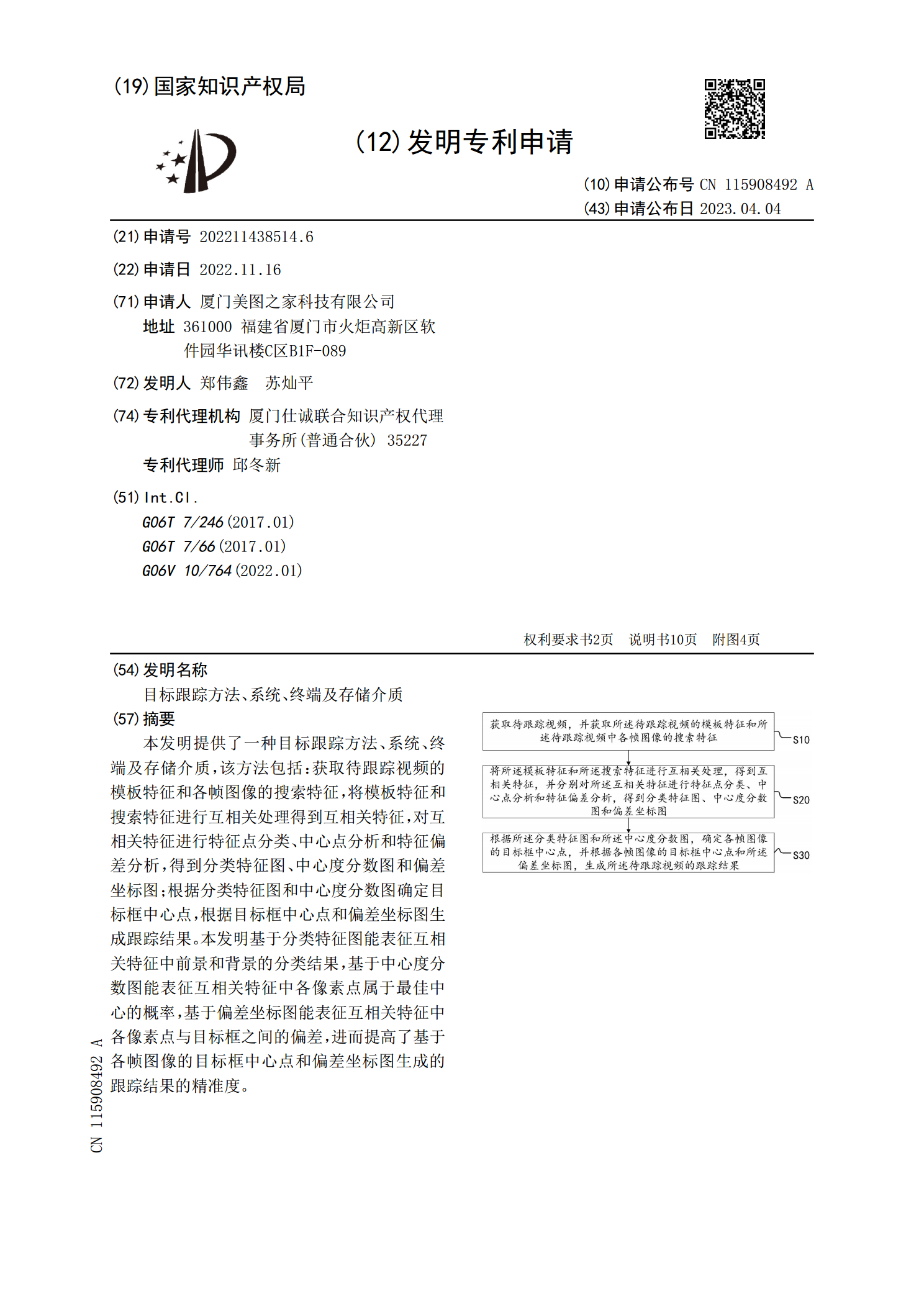
目标跟踪方法、系统、终端及存储介质.pdf
本发明提供了一种目标跟踪方法、系统、终端及存储介质,该方法包括:获取待跟踪视频的模板特征和各帧图像的搜索特征,将模板特征和搜索特征进行互相关处理得到互相关特征,对互相关特征进行特征点分类、中心点分析和特征偏差分析,得到分类特征图、中心度分数图和偏差坐标图;根据分类特征图和中心度分数图确定目标框中心点,根据目标框中心点和偏差坐标图生成跟踪结果。本发明基于分类特征图能表征互相关特征中前景和背景的分类结果,基于中心度分数图能表征互相关特征中各像素点属于最佳中心的概率,基于偏差坐标图能表征互相关特征中各像素点与目