
基于双目相机的距离测试方法、装置、系统和存储介质.pdf

一只****懿呀

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于双目相机的距离测试方法、装置、系统和存储介质.pdf
本发明公开了一种基于双目相机的距离测试方法、装置、系统和存储介质,该方法首先获取双目相机在预设图像范围内的盲区位置,判定待测目标处于盲区位置时,则采用单目对所述待测目标测距,并输出单目测距得到的测距结果;在判定所述待测目标不处于盲区位置时,则采用单目和双目对所述待测目标分别测距,并将获得的单目测距结果与双目测距结果进行权重计算后,得到并输出综合测距结果。该方法融合了双目视差测距原理和单目测距原理的各自优点,利用单双目结合测距,提高了测距精度,从而解决了传统双目相机在障碍物距离检测时受限于盲区而导致的测距精
双目相机参数调整方法、装置、系统和存储介质.pdf
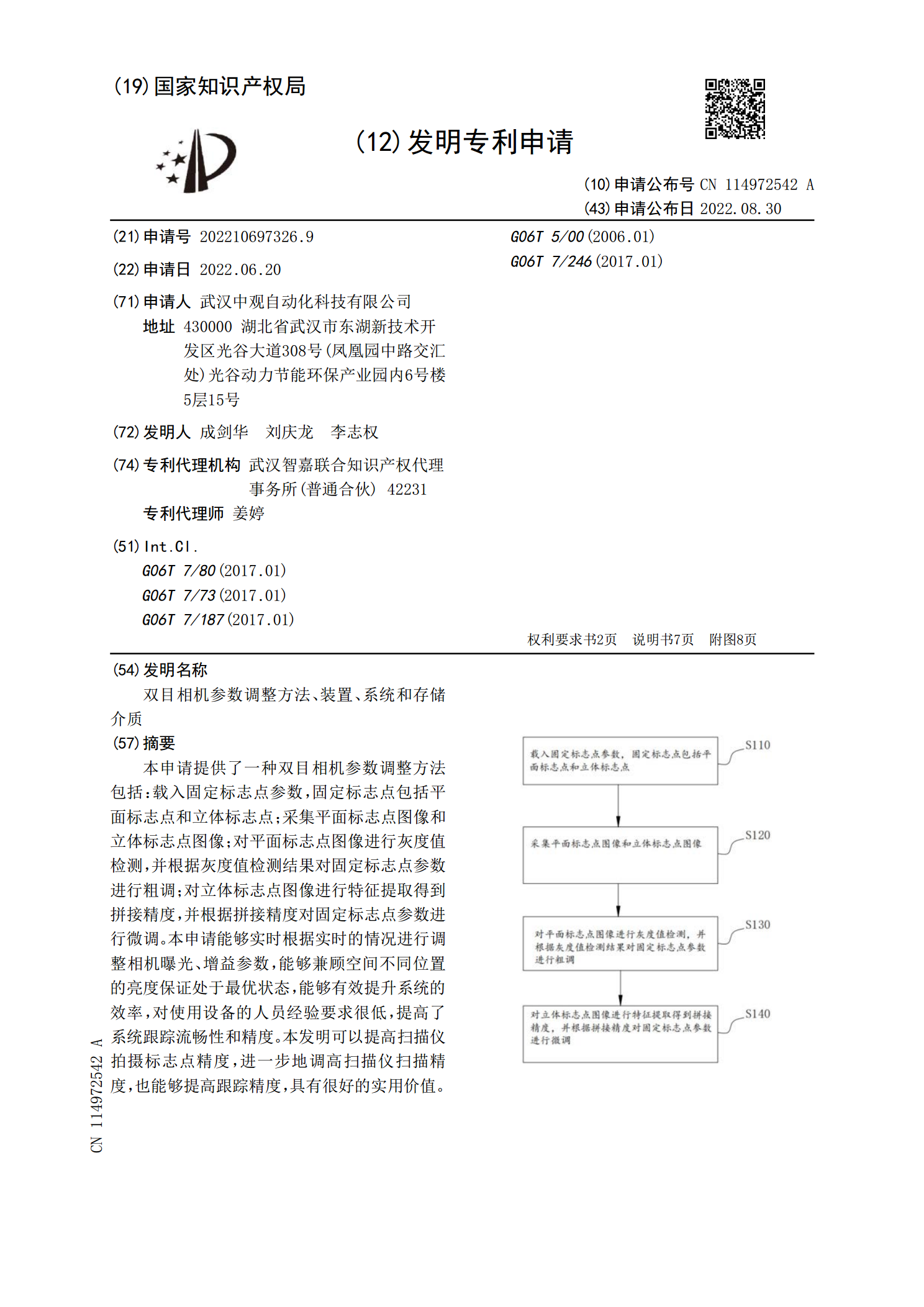
本申请提供了一种双目相机参数调整方法包括:载入固定标志点参数,固定标志点包括平面标志点和立体标志点;采集平面标志点图像和立体标志点图像;对平面标志点图像进行灰度值检测,并根据灰度值检测结果对固定标志点参数进行粗调;对立体标志点图像进行特征提取得到拼接精度,并根据拼接精度对固定标志点参数进行微调。本申请能够实时根据实时的情况进行调整相机曝光、增益参数,能够兼顾空间不同位置的亮度保证处于最优状态,能够有效提升系统的效率,对使用设备的人员经验要求很低,提高了系统跟踪流畅性和精度。本发明可以提高扫描仪拍摄标志点精
双目鱼眼相机的参数标定方法、装置、设备及存储介质.pdf
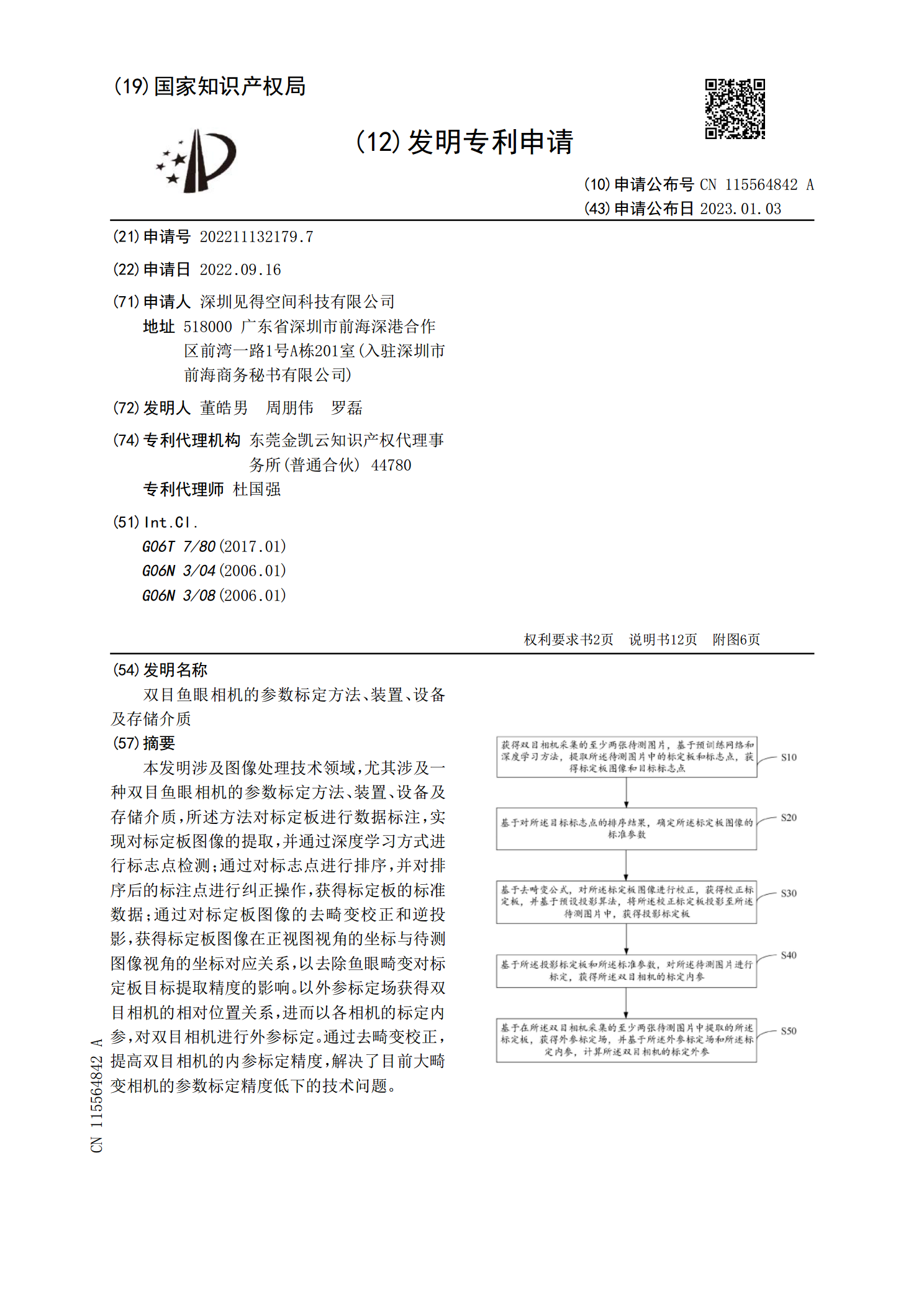
本发明涉及图像处理技术领域,尤其涉及一种双目鱼眼相机的参数标定方法、装置、设备及存储介质,所述方法对标定板进行数据标注,实现对标定板图像的提取,并通过深度学习方式进行标志点检测;通过对标志点进行排序,并对排序后的标注点进行纠正操作,获得标定板的标准数据;通过对标定板图像的去畸变校正和逆投影,获得标定板图像在正视图视角的坐标与待测图像视角的坐标对应关系,以去除鱼眼畸变对标定板目标提取精度的影响。以外参标定场获得双目相机的相对位置关系,进而以各相机的标定内参,对双目相机进行外参标定。通过去畸变校正,提高双目相
基于Linux的相机控制方法、装置、设备和存储介质.pdf
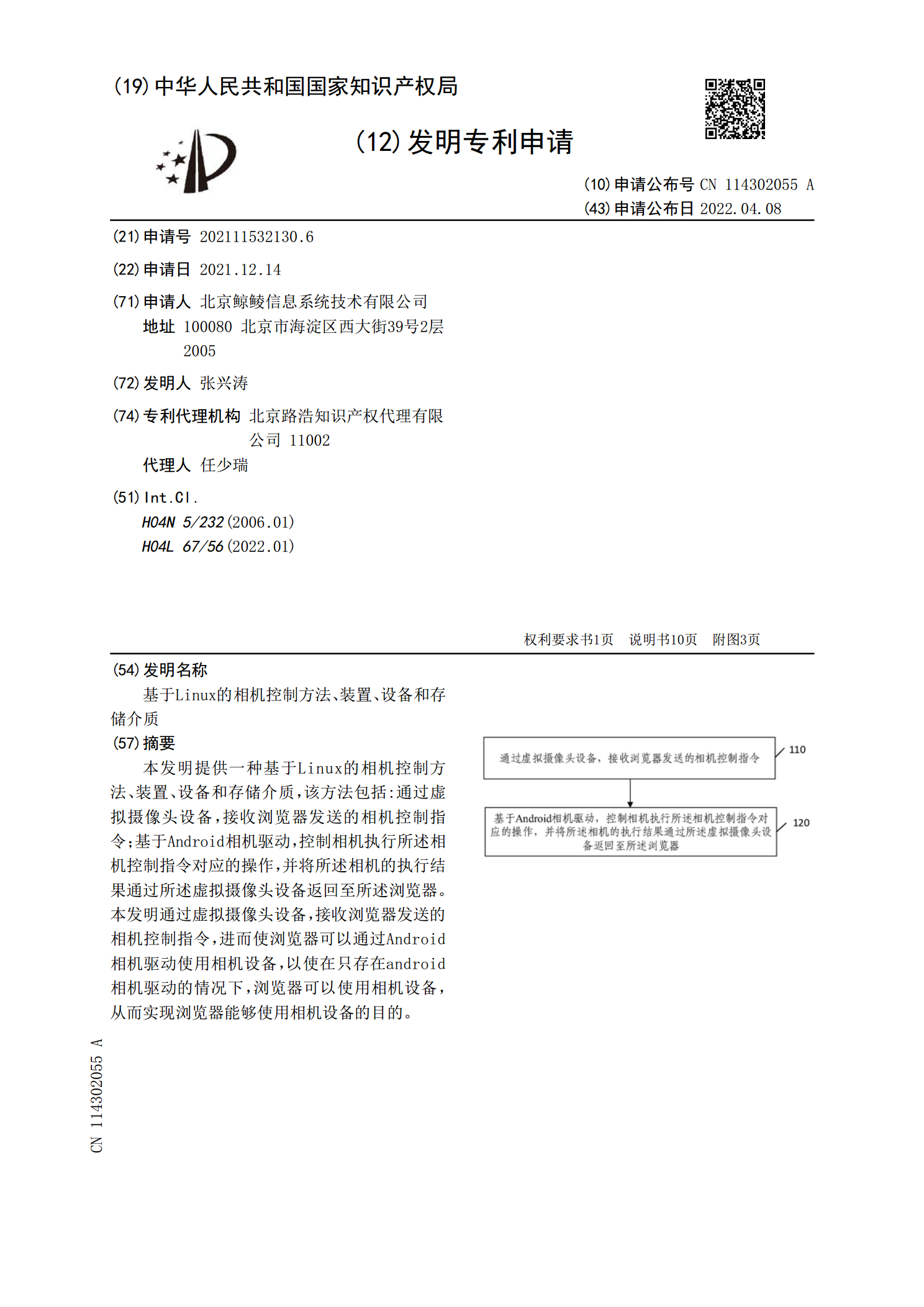
本发明提供一种基于Linux的相机控制方法、装置、设备和存储介质,该方法包括:通过虚拟摄像头设备,接收浏览器发送的相机控制指令;基于Android相机驱动,控制相机执行所述相机控制指令对应的操作,并将所述相机的执行结果通过所述虚拟摄像头设备返回至所述浏览器。本发明通过虚拟摄像头设备,接收浏览器发送的相机控制指令,进而使浏览器可以通过Android相机驱动使用相机设备,以使在只存在android相机驱动的情况下,浏览器可以使用相机设备,从而实现浏览器能够使用相机设备的目的。

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体