
面向车辆切入场景的责任敏感安全模型标定方法.pdf

a是****澜吖


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
面向车辆切入场景的责任敏感安全模型标定方法.pdf
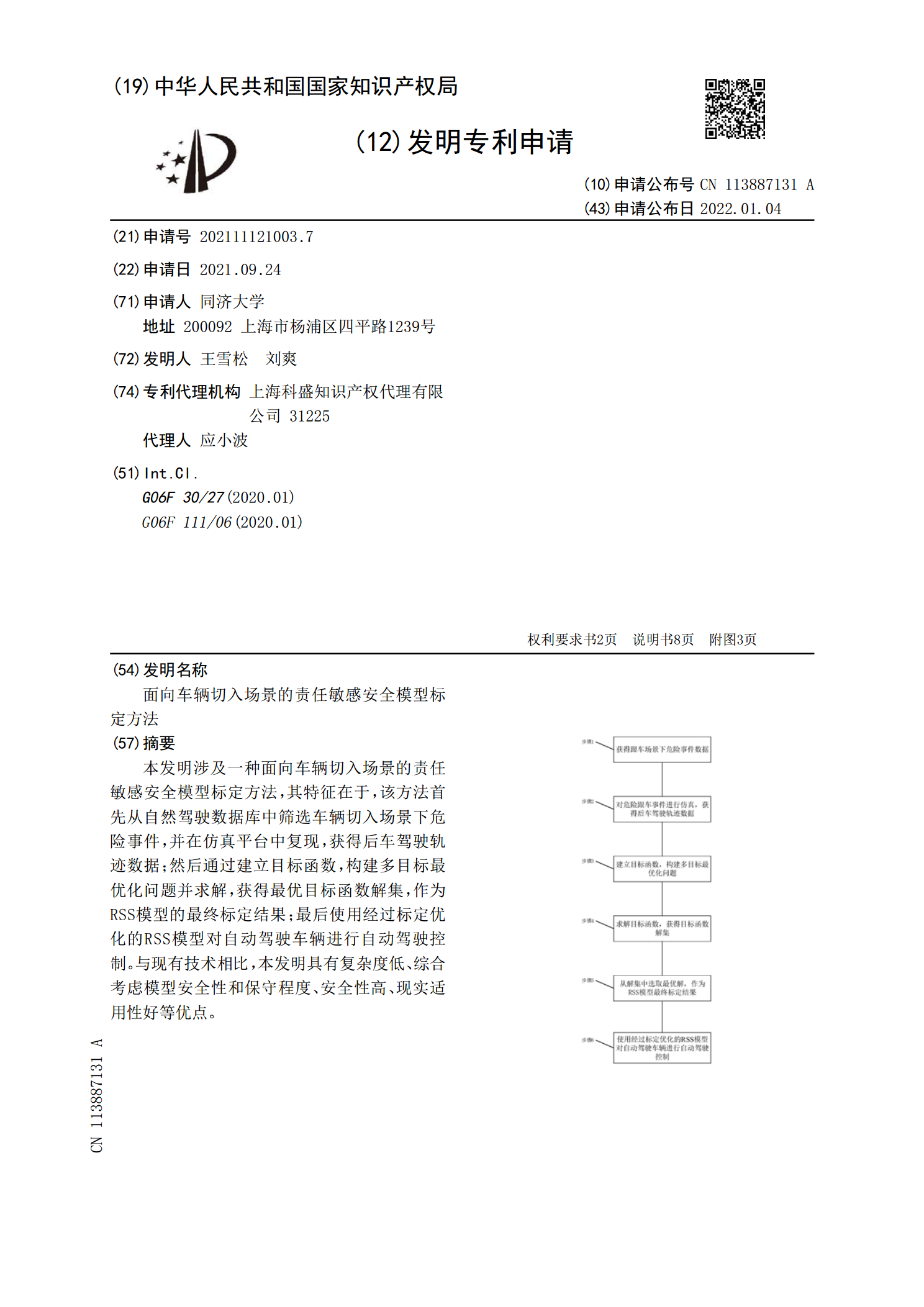
本发明涉及一种面向车辆切入场景的责任敏感安全模型标定方法,其特征在于,该方法首先从自然驾驶数据库中筛选车辆切入场景下危险事件,并在仿真平台中复现,获得后车驾驶轨迹数据;然后通过建立目标函数,构建多目标最优化问题并求解,获得最优目标函数解集,作为RSS模型的最终标定结果;最后使用经过标定优化的RSS模型对自动驾驶车辆进行自动驾驶控制。与现有技术相比,本发明具有复杂度低、综合考虑模型安全性和保守程度、安全性高、现实适用性好等优点。
面向自动驾驶环境人车冲突的责任敏感安全模型标定方法.pdf
本发明涉及一种面向自动驾驶环境人车冲突的责任敏感安全模型标定方法,该方法包括:步骤1,利用阈值法与人工校验提取人车冲突片段与运动数据;步骤2,将步骤1中获得数据,输入Simulink仿真平台获得自动驾驶环境下车辆与行人的相对运动数据;步骤3,以安全性最大与保守性最小为目标设置目标函数,利用NSGA‑II算法,对RSS模型中的反应时间、最小减速度、最大加速度、最大减速度四个参数进行标定,获得最优参数。与现有技术相比,本发明具有保证了在自动驾驶环境行人的安全性,扩展了RSS模型的应用场景等优点。

车辆传感器的场景标定方法及车辆标定场景.pdf
本发明公开了一种车辆传感器的场景标定方法及车辆标定场景,所述方法包括:确定场景标定所使用的参考点,所述参考点用于指示在所述车辆标定场景中进行场景标定时所使用的参考点;根据所述参考点对所述车辆传感器进行场景标定,得到所述车辆标定场景中的m个标定点,m为正整数。采用本发明,能解决现有车辆传感器标定中存在的操作困难、无法满足实际标定需求等技术问题。

基于部件模型的复杂场景车辆检测方法.docx
基于部件模型的复杂场景车辆检测方法随着自动驾驶技术的发展,车辆检测已成为自动驾驶的基本技术之一。在复杂的城市场景中,车辆检测面临着诸多挑战,如光照变化、天气变化、光照反射等问题。因此,基于部件模型的复杂场景车辆检测方法被提出,有效地解决了上述问题。基于部件模型的复杂场景车辆检测方法主要分为以下几个步骤:特征提取、候选框生成、部件检测和车辆检测。首先是特征提取。传统的特征提取方式如HOG、SURF等,在复杂的场景下鲁棒性差,无法准确地检测车辆。因而,使用深度学习的方法提取特征,常见的处理方式是使用卷积神经网
面向大场景模型web端动态渲染LOD处理方法.pdf
本发明是面向大场景模型web端动态渲染LOD处理方法。该方法首先设置细分参数对网格模型预计算;然后使用了一种新的文件格式对结果进行存储;最后根据自适应误差函数基于视点对多分辨率模型进行选择和渲染。本发明的特点是对大场景模型可以灵活地进行不同细节层次和节点数量的剖分,保证在渲染时能够保持较好的细节,适用于大规模静态场景的模型数据的动态调度及渲染显示。