
面向自动驾驶环境人车冲突的责任敏感安全模型标定方法.pdf

是你****元呀


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
面向自动驾驶环境人车冲突的责任敏感安全模型标定方法.pdf
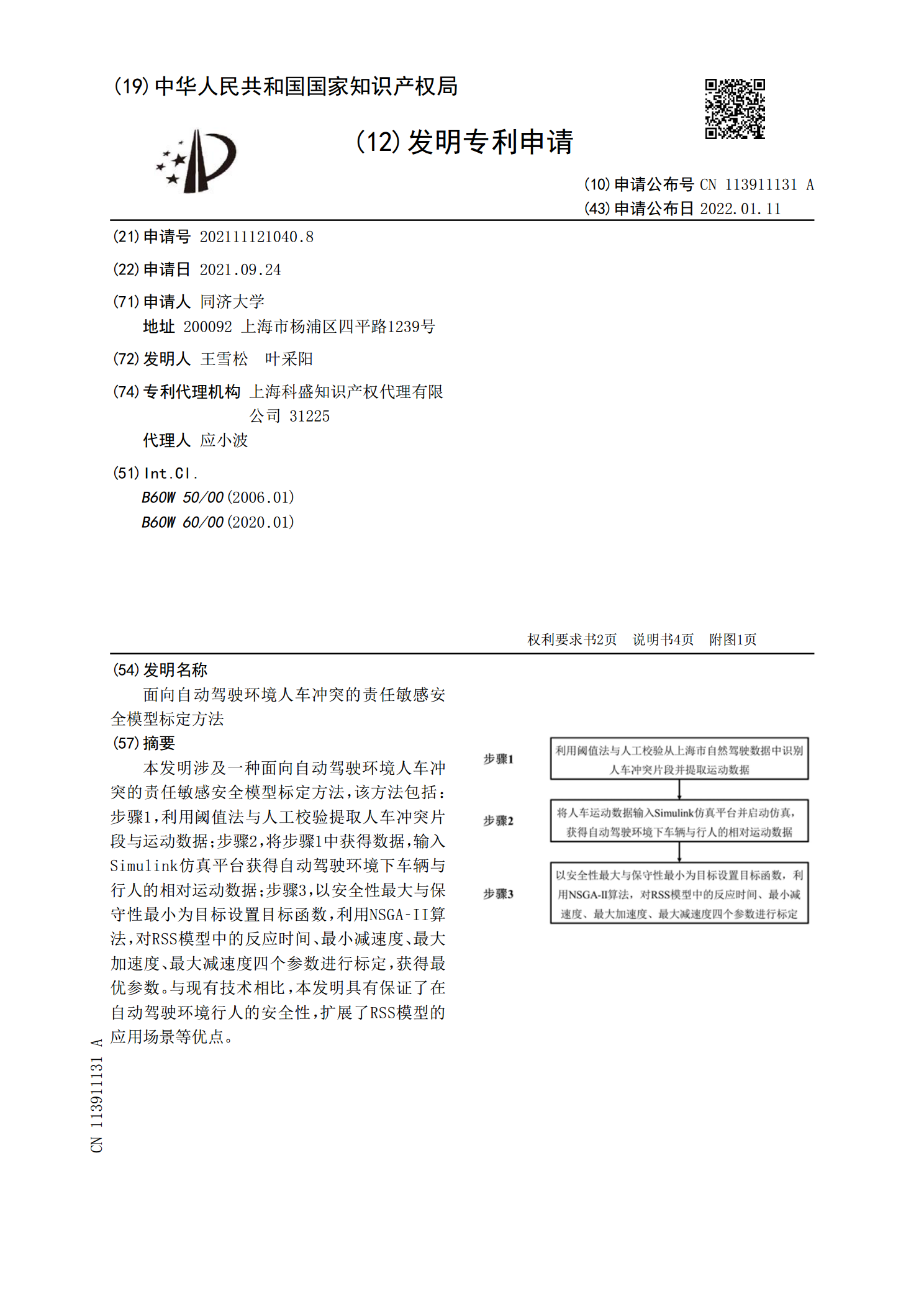
本发明涉及一种面向自动驾驶环境人车冲突的责任敏感安全模型标定方法,该方法包括:步骤1,利用阈值法与人工校验提取人车冲突片段与运动数据;步骤2,将步骤1中获得数据,输入Simulink仿真平台获得自动驾驶环境下车辆与行人的相对运动数据;步骤3,以安全性最大与保守性最小为目标设置目标函数,利用NSGA‑II算法,对RSS模型中的反应时间、最小减速度、最大加速度、最大减速度四个参数进行标定,获得最优参数。与现有技术相比,本发明具有保证了在自动驾驶环境行人的安全性,扩展了RSS模型的应用场景等优点。
面向车辆切入场景的责任敏感安全模型标定方法.pdf
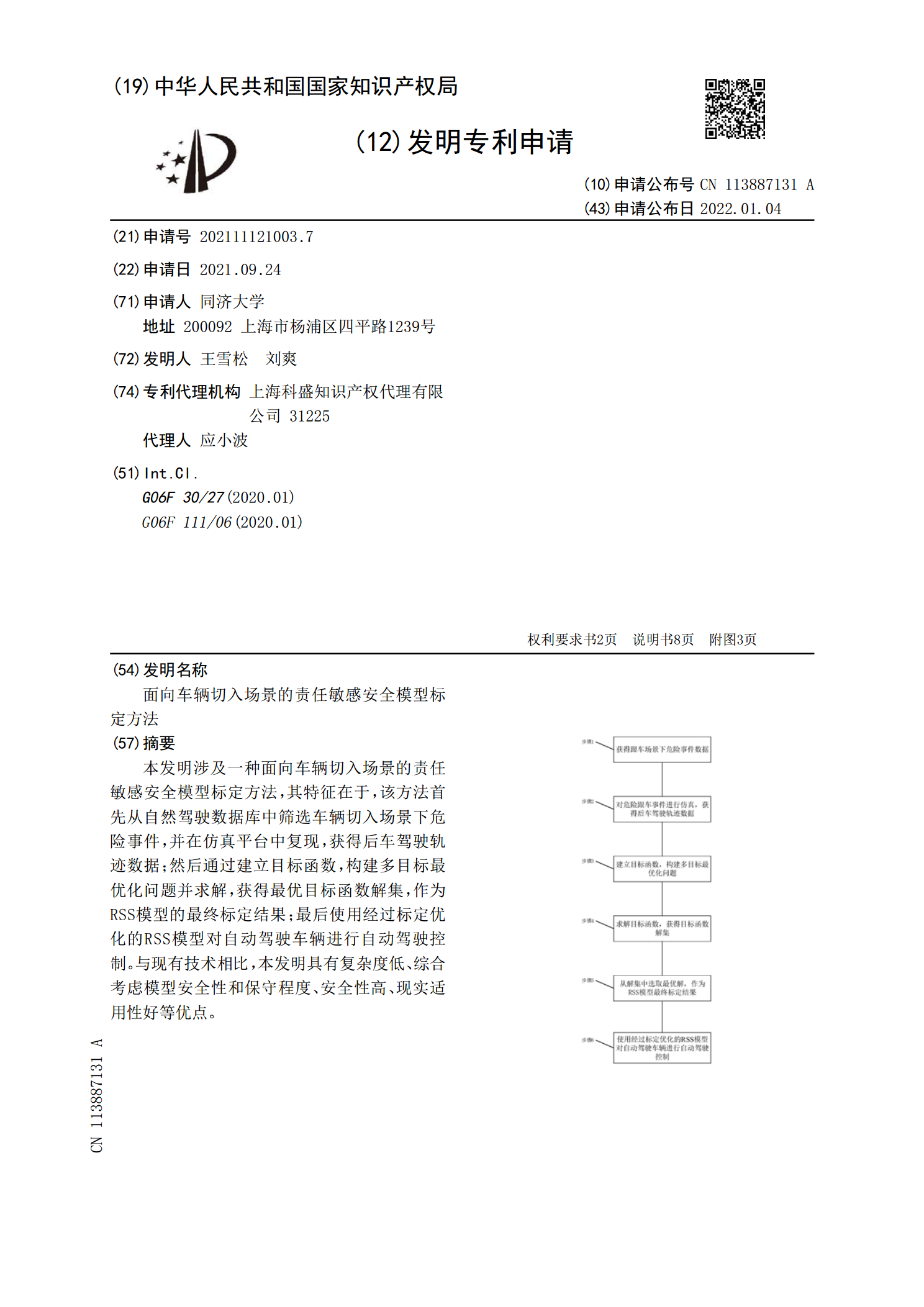
本发明涉及一种面向车辆切入场景的责任敏感安全模型标定方法,其特征在于,该方法首先从自然驾驶数据库中筛选车辆切入场景下危险事件,并在仿真平台中复现,获得后车驾驶轨迹数据;然后通过建立目标函数,构建多目标最优化问题并求解,获得最优目标函数解集,作为RSS模型的最终标定结果;最后使用经过标定优化的RSS模型对自动驾驶车辆进行自动驾驶控制。与现有技术相比,本发明具有复杂度低、综合考虑模型安全性和保守程度、安全性高、现实适用性好等优点。

考虑交通冲突指标分布问题的交通仿真模型标定方法.pdf
本发明公开了考虑交通冲突指标分布问题的交通仿真模型标定方法,同时考虑效率指标和安全指标,选择合适的交叉口效率指标作为交通仿真建模第一轮标定目标以及第二轮标定目标的约束条件,选择合适的交叉口安全指标作为交通仿真建模第二轮标定目标;通过计算仿真指标的标准差以及选择合适的置信区间对建立的仿真模型的最小所需仿真次数进行估计,有效减少参数校正的仿真试验次数;使用ANOVA检验或相关性检验,筛选出显著影响效率指标和安全指标的仿真参数;建立多约束的标定优化问题,提出使用遗传算法对模型参数进行标定的具体策略和流程;提出适

一种面向车路协同自动驾驶的关键路段辨识方法.pdf
本发明依据静态信息将道路划分成若干个特征路段,构建特征路段静态信息量函数,基于信息熵方法构建特征路段动态信息量计算模型,建立融合自动驾驶车流量、静态信息量、动态信息量的特征路段综合信息效益函数,基于特征路段综合信息效益计算结果,根据交通管理者的需求,确定一个判断特征路段是否为关键路段的阈值,若特征路段的综合信息效益值大于等于该阈值,则该为关键路段,因此该发明能够面向车路协同自动驾驶,为路侧车路协同设施设备的布局优化奠定基础,同时为交通管理者进行自动驾驶安全风险评价和管控策略制定提供依据。

环境模型中敏感性分析方法评述.docx
环境模型中敏感性分析方法评述敏感性分析是评估环境模型的不确定性和可信度的重要方法。通过分析模型中输入参数的变化对输出结果造成的影响,可以确定模型对不同输入参数的响应敏感性,帮助模拟者更好地评估模型的可信度、提高模型预测的准确性、减少不确定性,为决策提供更可靠的依据。当前环境模型中常用的敏感性分析方法主要包括:参数抽样、单因素敏感性、参数优化和全因子敏感性等。下面将对这些方法进行评述。1.参数抽样参数抽样方法基于随机抽取参数值并对模型进行多次模拟,得出输出结果的概率分布。该方法相对简单,同时也可在处理上进行