
一种隧道定位方法、装置、电子设备及可读存储介质.pdf

Ch****49


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种隧道定位方法、装置、电子设备及可读存储介质.pdf
本申请提供了一种隧道定位方法、装置、电子设备及可读存储介质,其中,该方法包括:通过云台设备获取目标未知点的局部球坐标,该目标未知点为隧道内的任意一点,该局部球坐标是以所述云台设备为坐标原点的局部球坐标系;根据目标未知点的局部球坐标,计算得到目标未知点的全局坐标;通过多个目标未知点的全局坐标,计算多个目标未知点之间的距离,基于此可以计算图像或视频信息中的裂隙准确尺寸。本申请通过云台设备获取目标未知点与云台设备之间的距离、以及云台设备的角度以得到目标未知点的局部球坐标,并将该局部球坐标进行计算、转换后得到目标
定位方法、装置、电子设备及可读存储介质.pdf
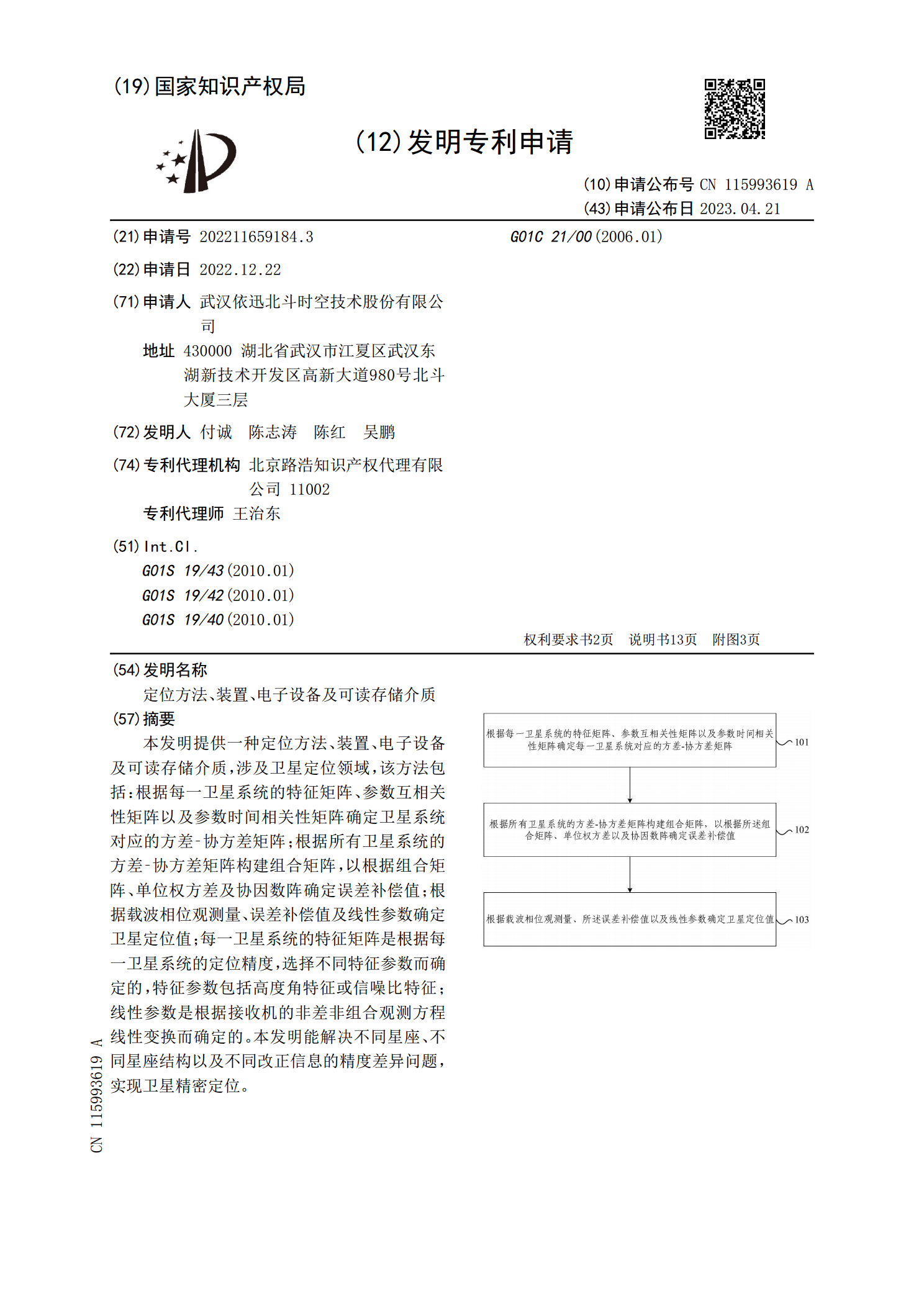
本发明提供一种定位方法、装置、电子设备及可读存储介质,涉及卫星定位领域,该方法包括:根据每一卫星系统的特征矩阵、参数互相关性矩阵以及参数时间相关性矩阵确定卫星系统对应的方差‑协方差矩阵;根据所有卫星系统的方差‑协方差矩阵构建组合矩阵,以根据组合矩阵、单位权方差及协因数阵确定误差补偿值;根据载波相位观测量、误差补偿值及线性参数确定卫星定位值;每一卫星系统的特征矩阵是根据每一卫星系统的定位精度,选择不同特征参数而确定的,特征参数包括高度角特征或信噪比特征;线性参数是根据接收机的非差非组合观测方程线性变换而确定

一种视觉定位方法、装置、电子设备及可读存储介质.pdf
本申请提供一种视觉定位方法、装置、电子设备及可读存储介质,本申请可以从目标图像中提取出多个视觉特征点,并根据从目标图像中检测出的目标灭点,可以确定出目标图像的保留区域和带有预设画面的去除区域,进一步地,将保留区域划分为大小相等的多个网格,并从每个网格包含的视觉特征点中,分别筛选出预设数量的视觉特征点作为可信特征点,通过只在保留区域筛选可信特征点,可以减少用于定位的可信特征点的数量、提高用于定位的可信特征点的可靠性,并且使可信特征点近似均匀分布在保留区域,可以在减少定位时耗的同时,提升视觉定位的成功率,这样

一种定位方法、装置、电子设备和可读存储介质.pdf
本申请提供一种定位方法、装置、电子设备和可读存储介质,其方法应用于电子设备,包括:确定所述电子设备的第一无线接入点,所述第一无线接入点为所述电子设备接收的多个无线接入点中包括位置信息的接入点;基于所述第一无线接入点的位置信息以及所述电子设备当前连接的第二无线接入点,确定所述电子设备的目标位置,其中,所述多个无线接入点包括所述第二无线接入点。本申请可以减少定位误差。
隧道建模方法、装置、电子设备及可读存储介质.pdf
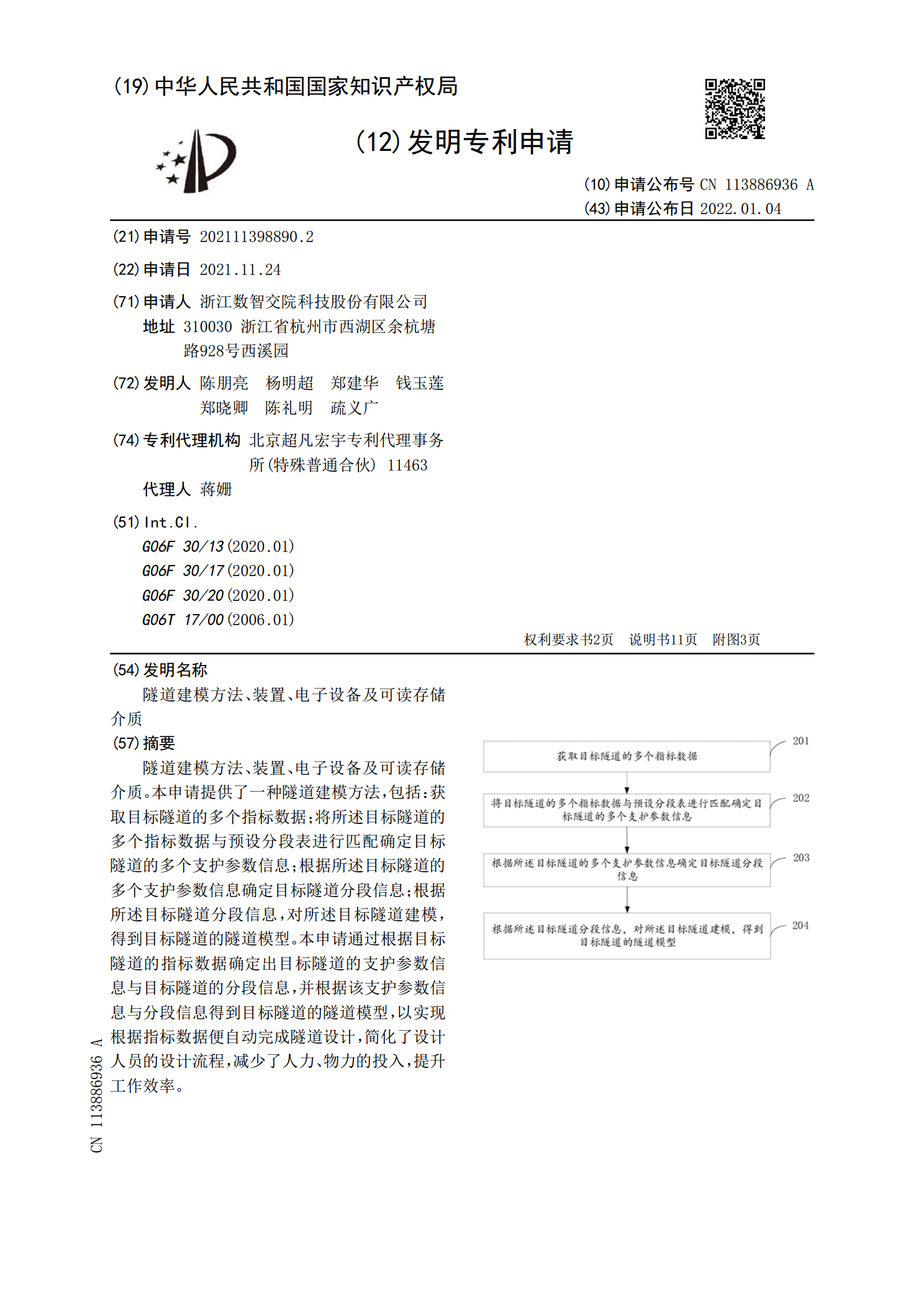
隧道建模方法、装置、电子设备及可读存储介质。本申请提供了一种隧道建模方法,包括:获取目标隧道的多个指标数据;将所述目标隧道的多个指标数据与预设分段表进行匹配确定目标隧道的多个支护参数信息;根据所述目标隧道的多个支护参数信息确定目标隧道分段信息;根据所述目标隧道分段信息,对所述目标隧道建模,得到目标隧道的隧道模型。本申请通过根据目标隧道的指标数据确定出目标隧道的支护参数信息与目标隧道的分段信息,并根据该支护参数信息与分段信息得到目标隧道的隧道模型,以实现根据指标数据便自动完成隧道设计,简化了设计人员的设计流