
基于LuGre模型的伺服控制系统的参数辨识方法.pdf

永香****能手


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于LuGre模型的伺服控制系统的参数辨识方法.pdf
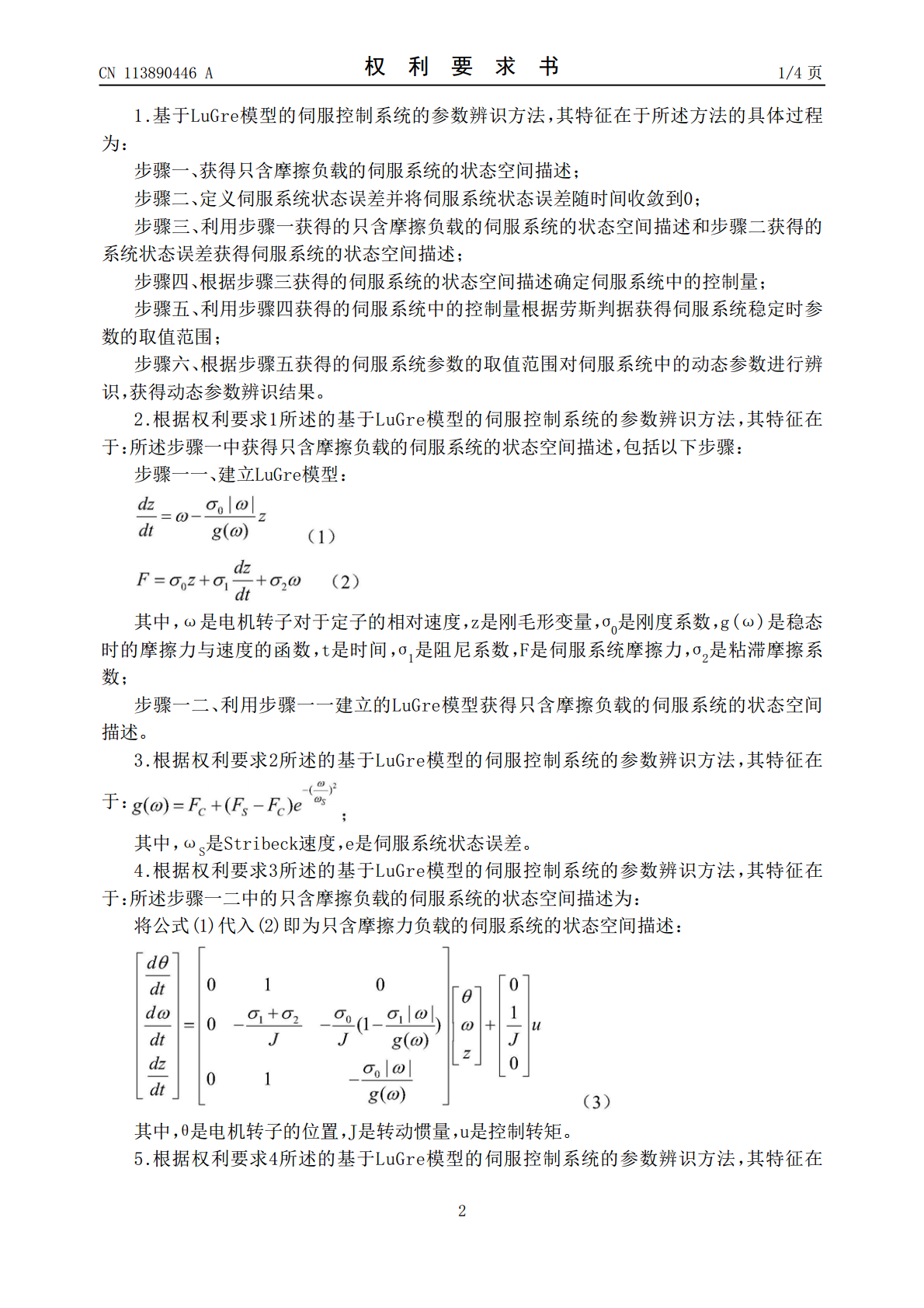
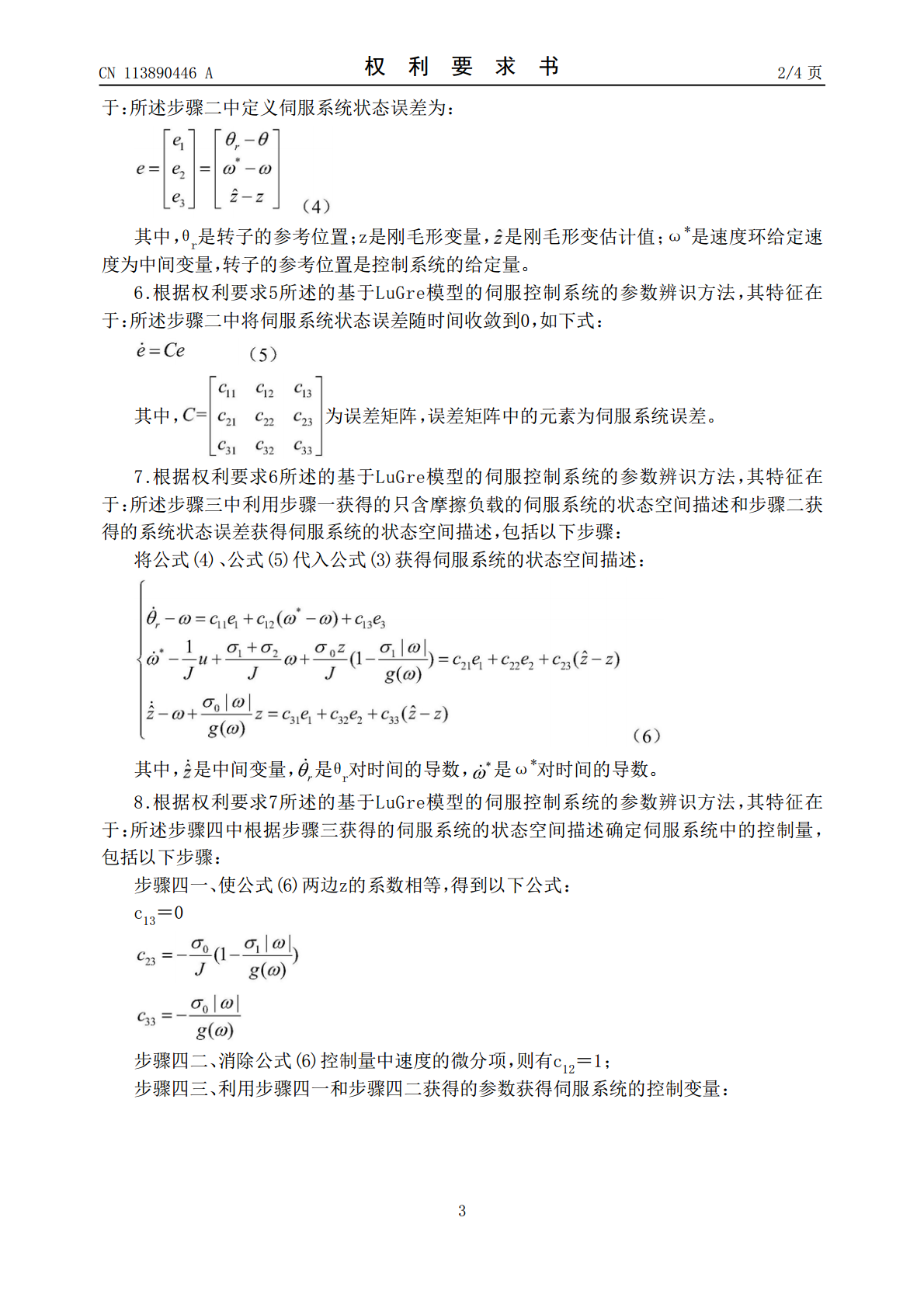
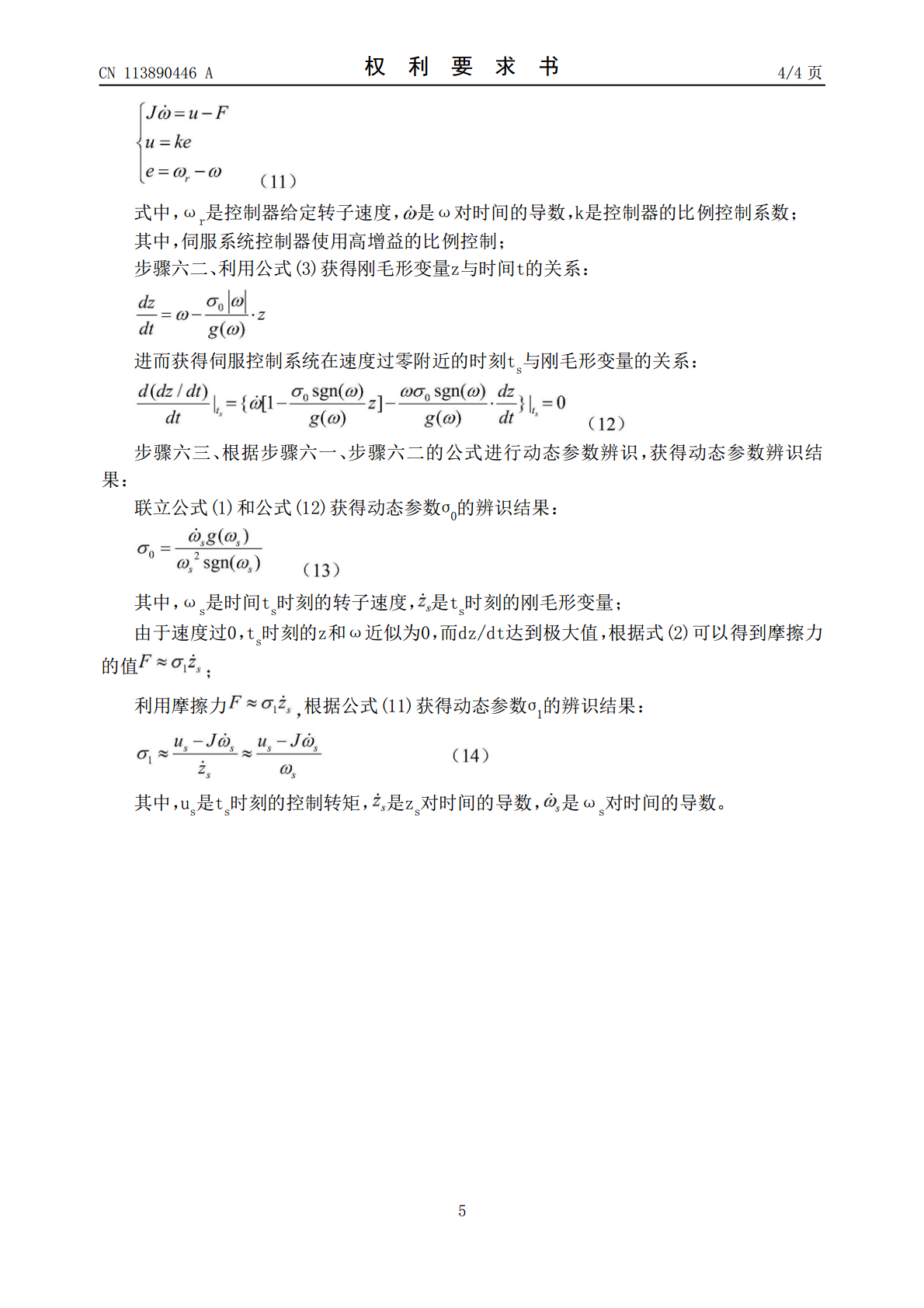
基于LuGre模型的伺服控制系统的参数辨识方法,涉及系统控制领域。本发明是为了解决目前LuGre模型被应用到伺服系统中减小摩擦力还存在辨识准确率低从而导致无法在工程实践中运用的问题。本发明包括:获得只含摩擦负载的伺服系统的状态空间描述;定义伺服系统状态误差并将伺服系统状态误差随时间收敛到0;获得伺服系统的状态空间描述;确定伺服系统中的控制量;根据劳斯判据获得伺服系统稳定时参数的取值范围;根据伺服系统参数的取值范围对伺服系统中的动态参数进行辨识,获得动态参数辨识结果。本发明用于对伺服系统的动态参数进行辨识。

基于Lugre摩擦模型的参数辨识装置及方法.pdf
本发明公开一种基于Lugre摩擦模型的参数辨识装置及方法。其中方法包括创建配置有Lugre摩擦模型的PID闭环控制系统,绘制输出转速w和摩擦力矩F<base:Sub>fric</base:Sub>的第一特征曲线;根据第一特征曲线辨识摩擦力矩F<base:Sub>fric</base:Sub>的库伦摩擦力及stribeck速度;获取伺服电机输入的峰值电压Umax;在伺服电机输入一速度极缓慢变化的辨识电压,辨识电压在先从一初始电压上升到峰值电压Umax,在后从峰值电压Umax下降到负数的峰值电压Umax;获取

基于区间分析的LuGre摩擦模型参数辨识方法.docx
基于区间分析的LuGre摩擦模型参数辨识方法摘要针对LuGre摩擦模型参数辨识方法研究中存在的问题,本文提出了一种基于区间分析的方法,通过对LuGre摩擦模型的多组实验数据进行区间划分和参数敏感性分析,得到了一组最佳的模型参数,取得了较好的预测效果。此方法不仅克服了传统参数辨识方法存在的局限性,也为LuGre摩擦模型的工程应用提供了可行性思路。关键词:LuGre摩擦模型;区间分析;参数辨识;参数敏感性分析一、引言在现代工业领域的运动控制和机电系统设计中,摩擦现象是一个常见而且重要的因素。因此对摩擦现象的建

基于改进遗传算法的LuGre摩擦模型参数辨识及补偿.docx
基于改进遗传算法的LuGre摩擦模型参数辨识及补偿摘要LuGre模型被广泛应用于机械系统中,因其能够准确模拟金属与金属之间的摩擦力。但是,该模型的参数辨识及补偿是机械系统控制中的难点之一。本文提出了一种基于改进遗传算法的LuGre摩擦模型参数辨识及补偿方法。在该方法中,我们通过对摩擦力信号进行采集和数据处理,将其转化为实际的摩擦模型参数。接着,我们利用改进的遗传算法优化其中的各个参数,以提高模型的精度和鲁棒性。最后,我们将优化后的模型参数用于实际的摩擦力补偿中。关键词:LuGre模型,摩擦模型参数,遗传算

基于LuGre摩擦模型的参数辨识与补偿控制研究的任务书.docx
基于LuGre摩擦模型的参数辨识与补偿控制研究的任务书任务书任务名称:基于LuGre摩擦模型的参数辨识与补偿控制研究任务目的:本任务旨在研究LuGre摩擦模型的参数辨识与补偿控制方法,提高系统的控制性能和精度,为实际应用提供一定的理论基础和技术支持。任务内容:1.研究LuGre摩擦模型的基本理论和特点,分析其适用范围和局限性。2.针对LuGre摩擦模型的参数辨识方法进行研究,包括实验数据采集及处理、模型参数估计算法等。3.针对LuGre摩擦模型的补偿控制方法进行研究,探索适合不同应用场景的控制策略和算法。