
基于动力学的斗轮堆取料机恒流量取料方法及装置.pdf

是你****韵呀

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于动力学的斗轮堆取料机恒流量取料方法及装置.pdf
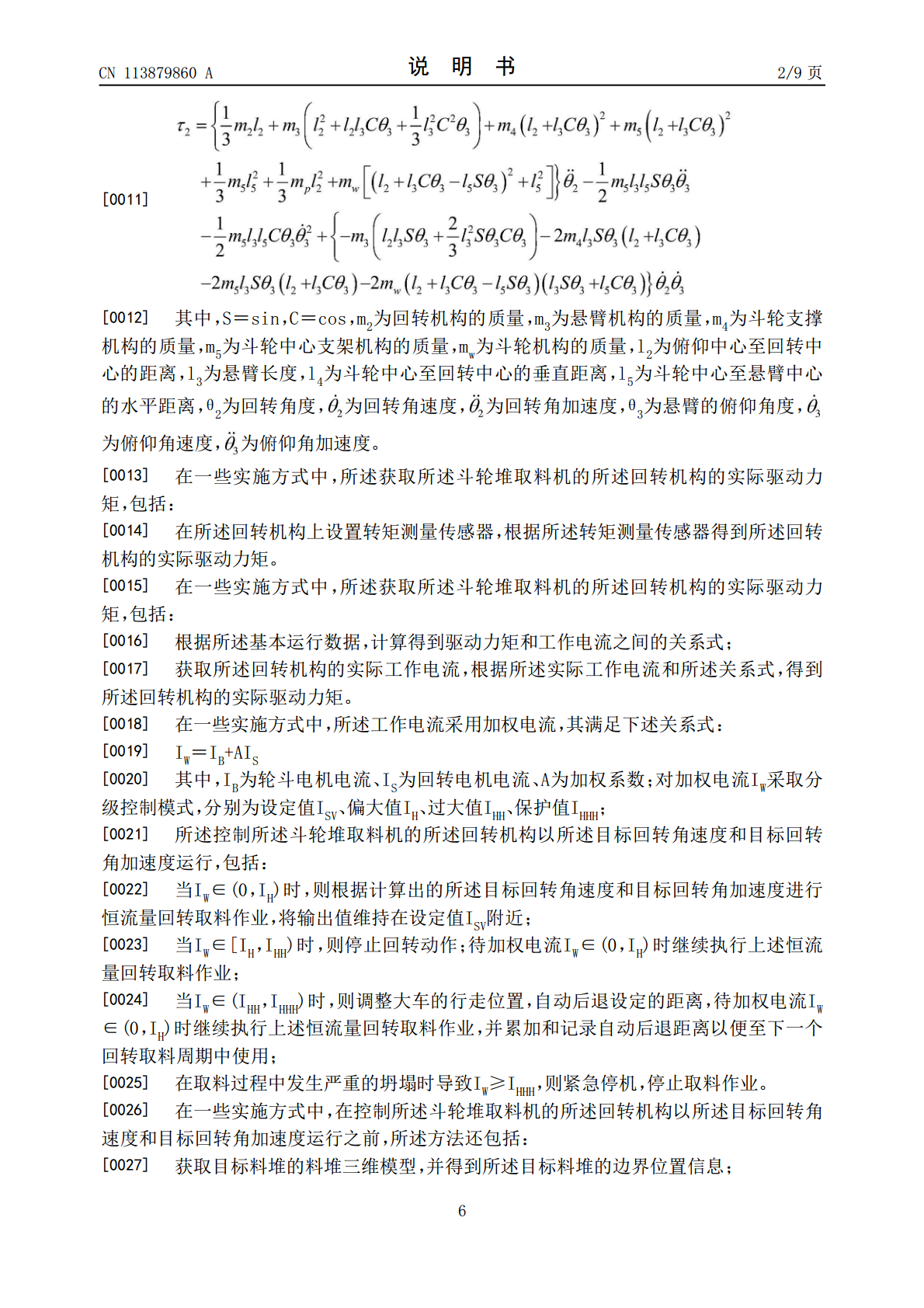
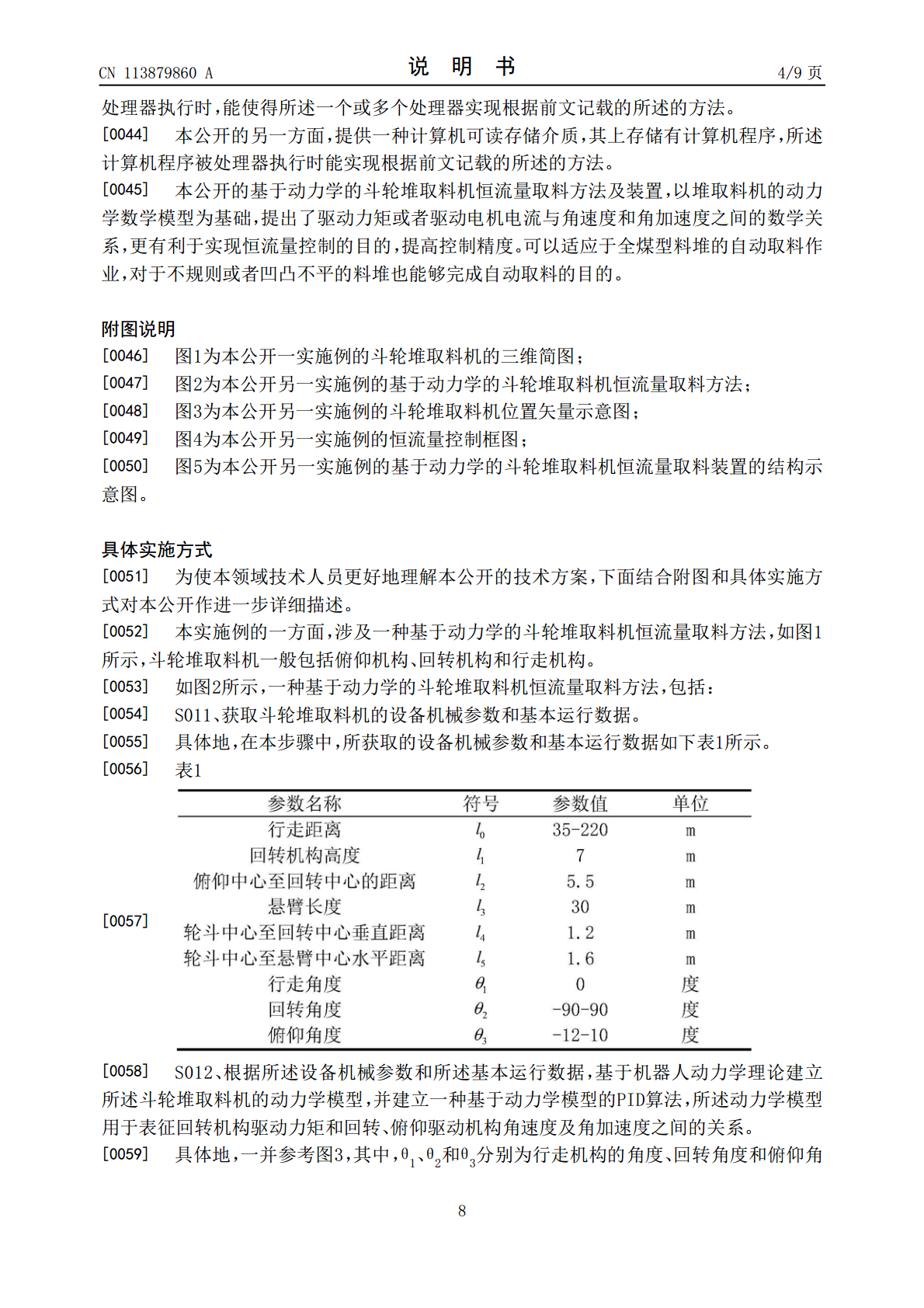
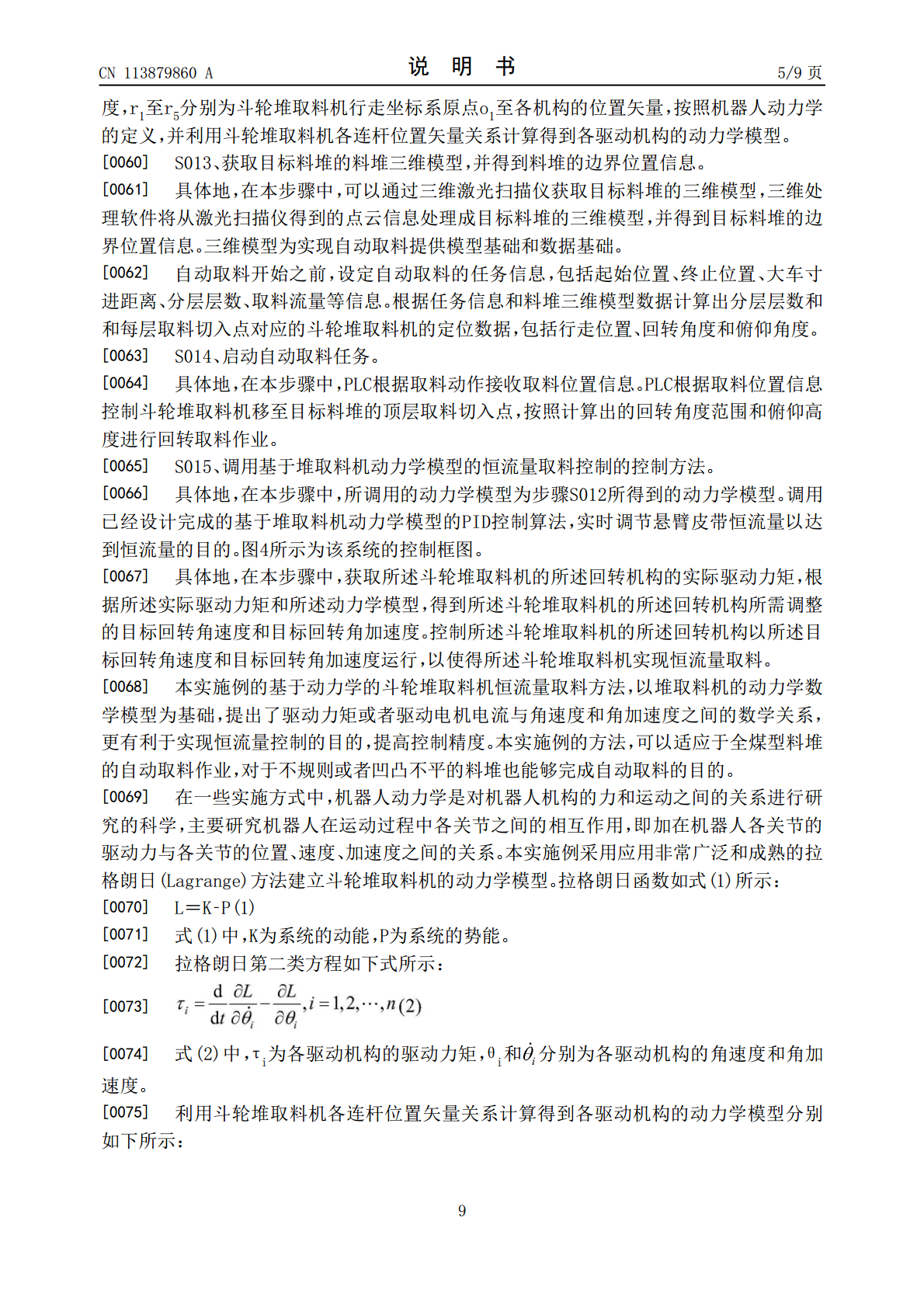
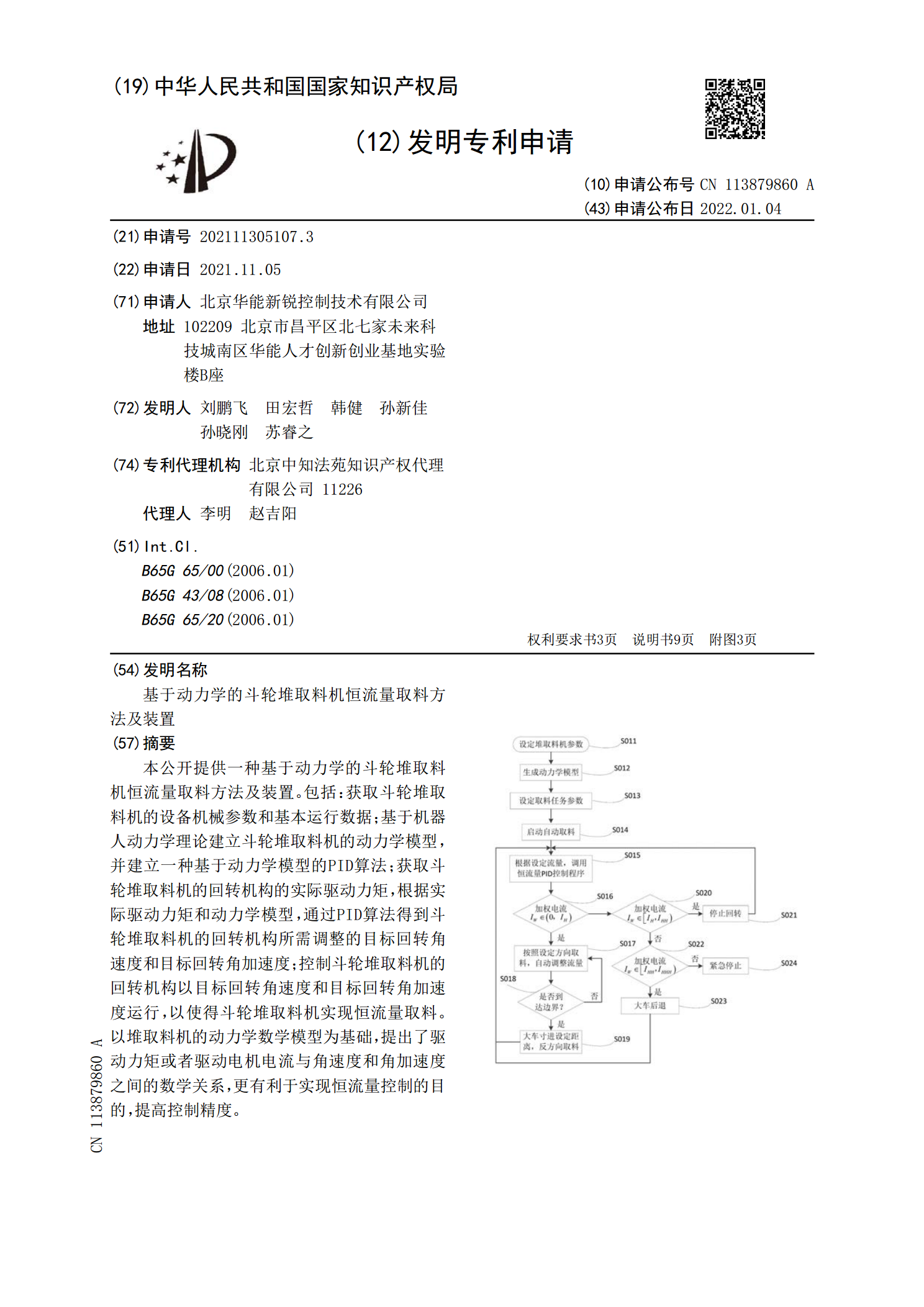
本公开提供一种基于动力学的斗轮堆取料机恒流量取料方法及装置。包括:获取斗轮堆取料机的设备机械参数和基本运行数据;基于机器人动力学理论建立斗轮堆取料机的动力学模型,并建立一种基于动力学模型的PID算法;获取斗轮堆取料机的回转机构的实际驱动力矩,根据实际驱动力矩和动力学模型,通过PID算法得到斗轮堆取料机的回转机构所需调整的目标回转角速度和目标回转角加速度;控制斗轮堆取料机的回转机构以目标回转角速度和目标回转角加速度运行,以使得斗轮堆取料机实现恒流量取料。以堆取料机的动力学数学模型为基础,提出了驱动力矩或者驱
一种斗轮堆取料机的分料装置及斗轮堆取料机.pdf
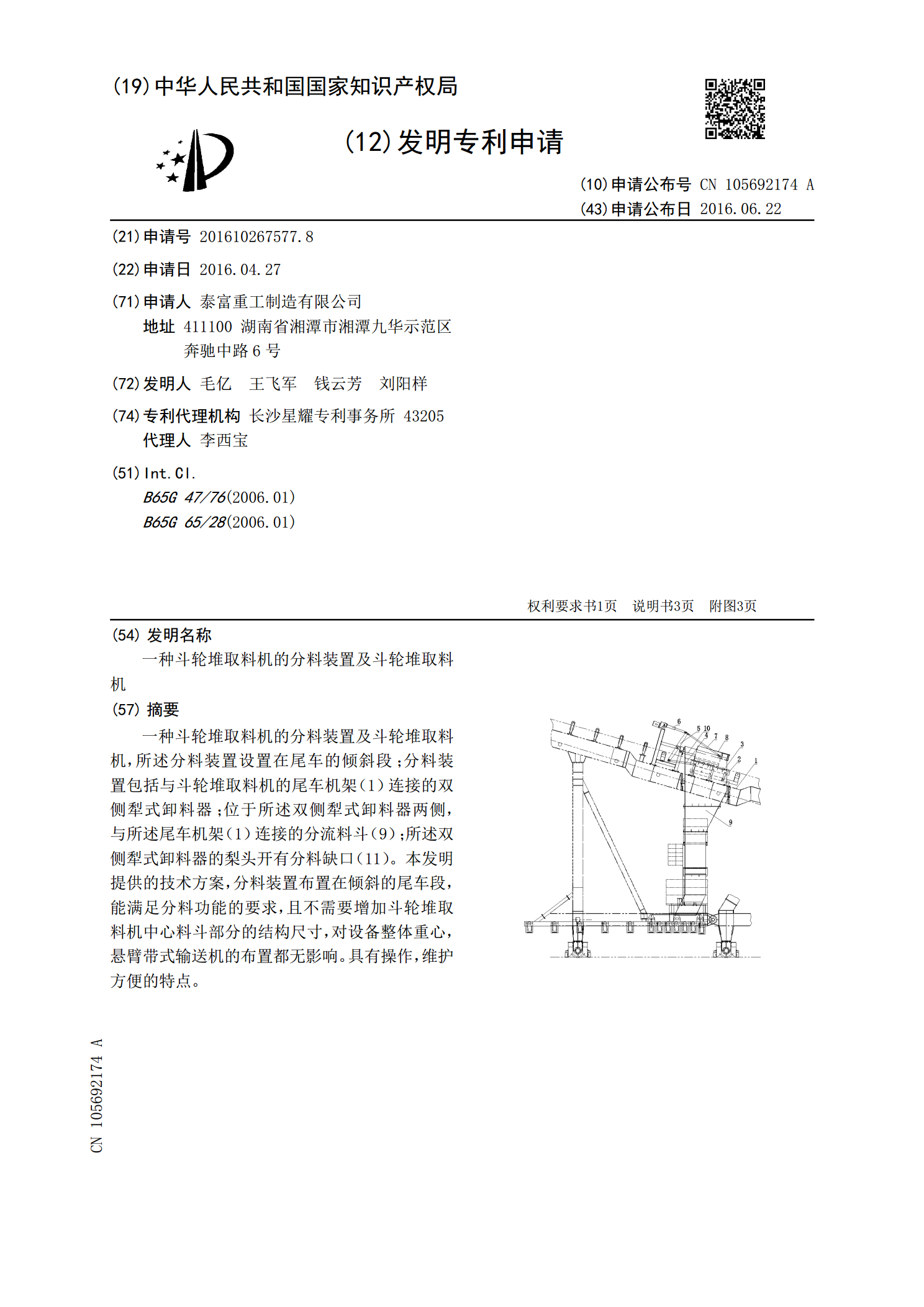
一种斗轮堆取料机的分料装置及斗轮堆取料机,所述分料装置设置在尾车的倾斜段;分料装置包括与斗轮堆取料机的尾车机架(1)连接的双侧犁式卸料器;位于所述双侧犁式卸料器两侧,与所述尾车机架(1)连接的分流料斗(9);所述双侧犁式卸料器的梨头开有分料缺口(11)。本发明提供的技术方案,分料装置布置在倾斜的尾车段,能满足分料功能的要求,且不需要增加斗轮堆取料机中心料斗部分的结构尺寸,对设备整体重心,悬臂带式输送机的布置都无影响。具有操作,维护方便的特点。

用于斗轮取料机的自动取料流量控制方法及装置.pdf
本发明涉及取料控制领域,公开了一种用于斗轮取料机的自动取料流量控制方法,该方法包括:估算斗轮取料机的取料流量反馈值;检测斗轮当前是否处于旋转状态;以及当斗轮当前处于旋转状态时,根据设定取料流量值和取料流量反馈值对斗轮取料机臂架的回转速度进行调整。根据本发明的另一方面,还提供一种用于斗轮取料机的自动取料流量控制装置,利用该方法和装置能够实现取料流量的精确控制,并能提高作业效率。

全功能斗轮堆取料机及其取料方法.pdf
本发明公开了一种全功能斗轮堆取料机及其取料方法,其特征在于:包括主机、活动式尾车装置Ⅰ、活动式尾车装置Ⅱ、分叉漏斗装置、悬臂导料槽装置、斜漏斗装置、中心下部漏斗装置;本发明通过活动式尾车装置Ⅰ、活动式尾车装置Ⅱ两种位置组合,配合分叉漏斗装置内部活动板的位置变化,实现单机具备一条地面皮带输送带双向来料堆向料场功能、双向来料直通功能、取料双向输送功能及双向来料分流的功能。本发明具有实现单机功能俱全、降低设备投资及土建成本,提高料场利用率及降低运行成本,结构简单,使用维护方便等优点,极大地提高了生产效率。

斗轮堆取料机.docx
第三章斗轮堆取料机一、概述煤场机械的种类很多,常用的有:斗轮堆取料机、门式滚轮机及装卸桥。煤场机械形式的选择,取决于煤场的形状。斗轮堆取料机常用于条形煤场中。斗轮堆取料机是在斗轮挖掘机的基础上发展起来的,是一种大型、连续、高效的散料装卸机械。它具有生产效率高、能耗低、自重轻、投资省及操作简便等优点。斗轮机的形式很多,其分类方法也较多。按行走机构的形式,斗轮堆取料机可分为履带式、轮胎式及轨道式三种;按斗轮臂架的平衡方式,斗轮堆取料机可分为活配重式、死配重式及整体平衡式三种;按理论生产能力,斗轮堆取料机可分为