
基于ROS的谐波雷达智能化探测系统和方法.pdf

论文****酱吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于ROS的谐波雷达智能化探测系统和方法.pdf
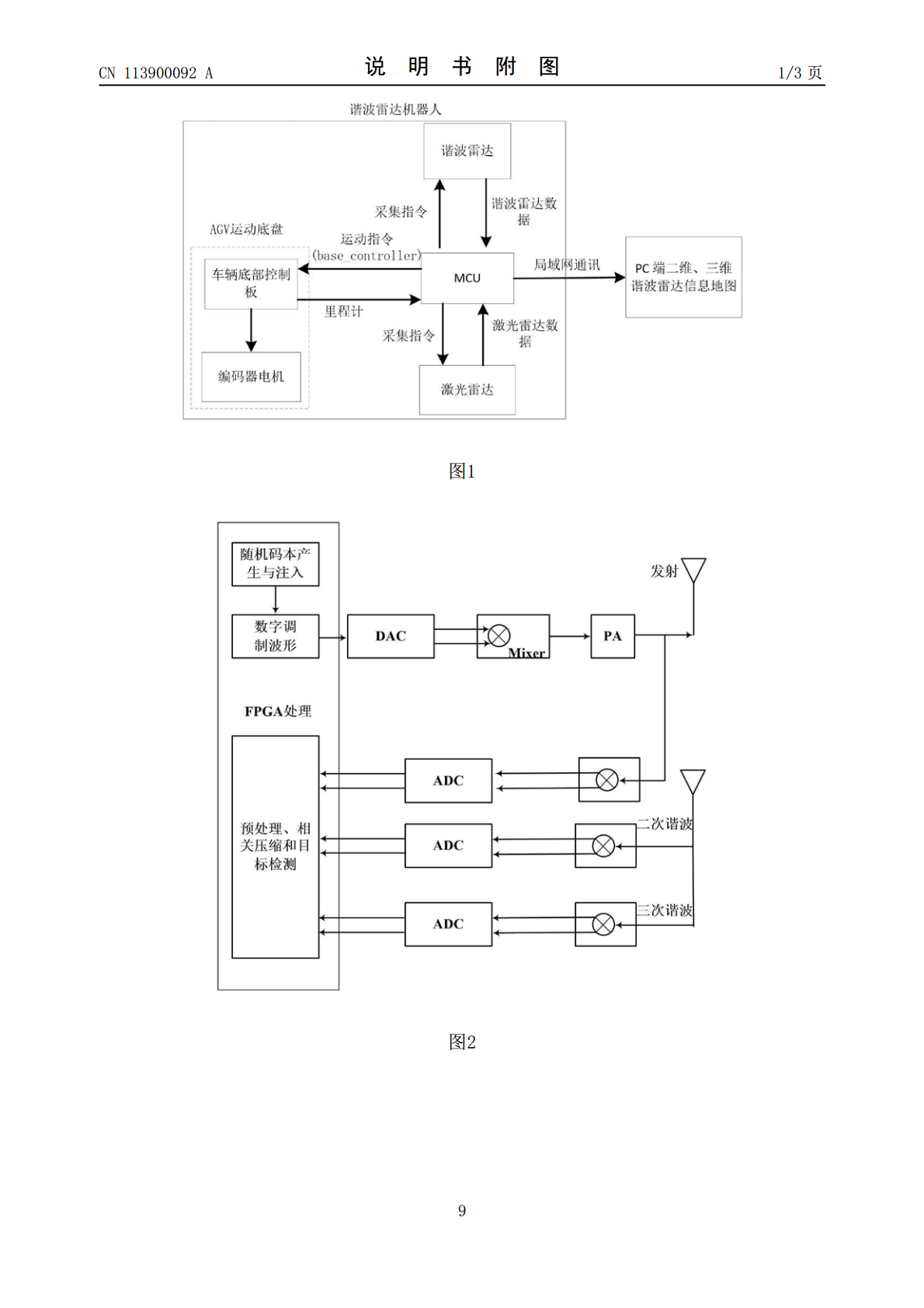
本发明提供了一种基于ROS的谐波雷达智能化探测系统和方法,包括:PC端和谐波雷达探测AGV机器人,所述谐波雷达探测AGV机器人包括:谐波雷达、激光雷达、MCU中控和AGV运动底盘;所述PC端与谐波雷达探测AGV机器人采用局域网通讯进行数据传输,所述谐波雷达、激光雷达、MCU中控和AGV运动底盘采用串口进行通讯传输,基于ROS系统的智能化谐波雷达对地面进行扫描,构建谐波雷达地图,进而进行目标检测。本发明实现了具有自主定位、自主导航及自主路径规划功能的谐波雷达智能化扫描系统,提高了工作人员对隐蔽目标的探测和定
基于多普勒雷达的探测系统及探测方法.pdf
本发明公开了一种基于多普勒雷达的探测系统及探测方法。根据本发明实施例的基于多普勒雷达的探测系统包括第一探测装置,设置在飞行平台上,进行初次探测以探测是否存在来袭目标,并在探测到存在所述来袭目标时,获取所述来袭目标的初探来袭角度;脉冲多普勒雷达,设置在所述飞行平台上,并与所述第一探测装置相连接以获取所述初探来袭角度;所述脉冲多普勒雷达在接收到所述初探来袭角度后,根据所述初探来袭角度进行二次探测以探测是否存在所述来袭目标。根据本发明实施例的基于多普勒雷达的探测系统及探测方法,能够降低探测的虚警率。
基于软件无线电的树木雷达探测系统及方法.pdf
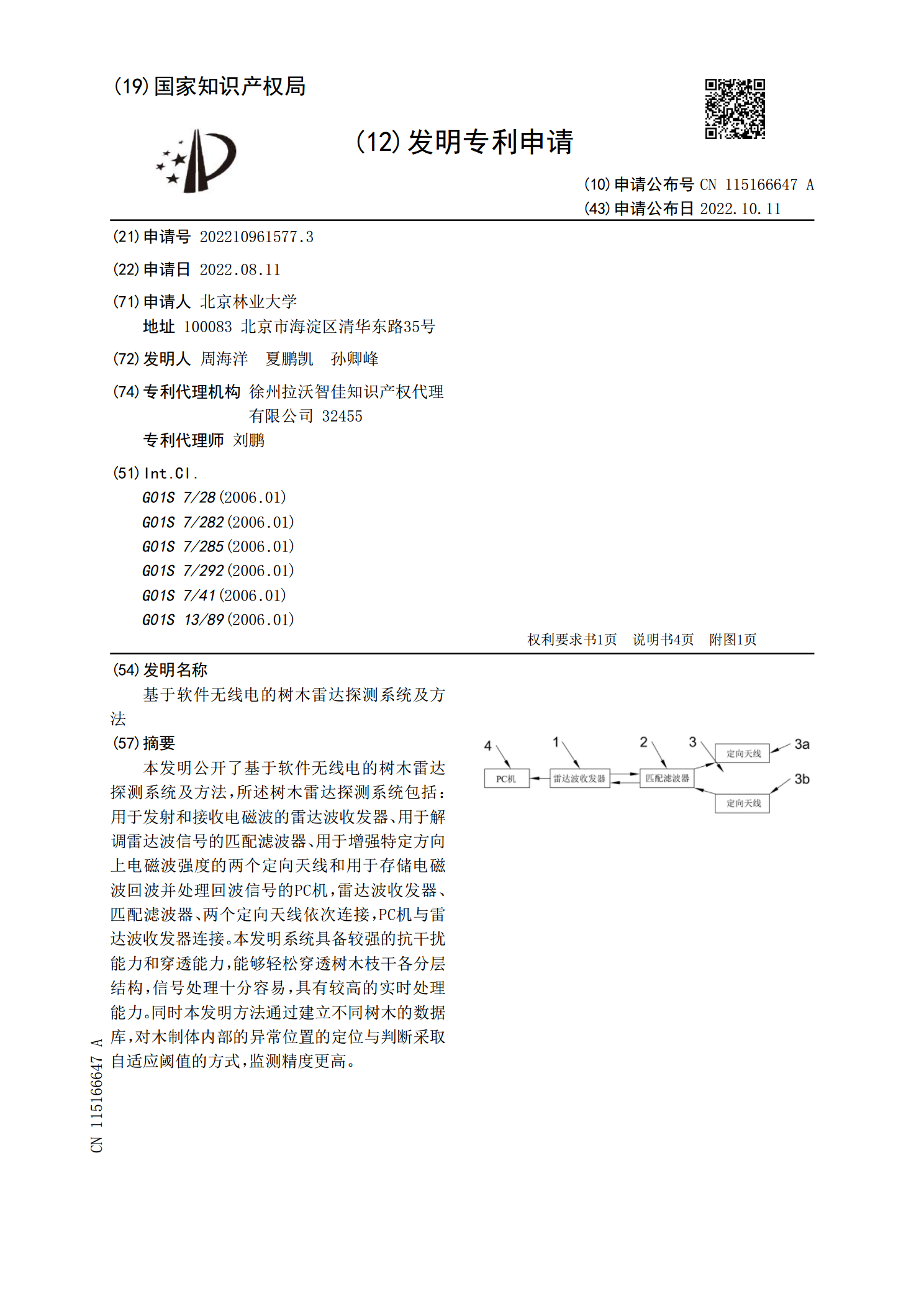
本发明公开了基于软件无线电的树木雷达探测系统及方法,所述树木雷达探测系统包括:用于发射和接收电磁波的雷达波收发器、用于解调雷达波信号的匹配滤波器、用于增强特定方向上电磁波强度的两个定向天线和用于存储电磁波回波并处理回波信号的PC机,雷达波收发器、匹配滤波器、两个定向天线依次连接,PC机与雷达波收发器连接。本发明系统具备较强的抗干扰能力和穿透能力,能够轻松穿透树木枝干各分层结构,信号处理十分容易,具有较高的实时处理能力。同时本发明方法通过建立不同树木的数据库,对木制体内部的异常位置的定位与判断采取自适应阈值
基于Zynq平台的太赫兹雷达探测系统以及方法.pdf
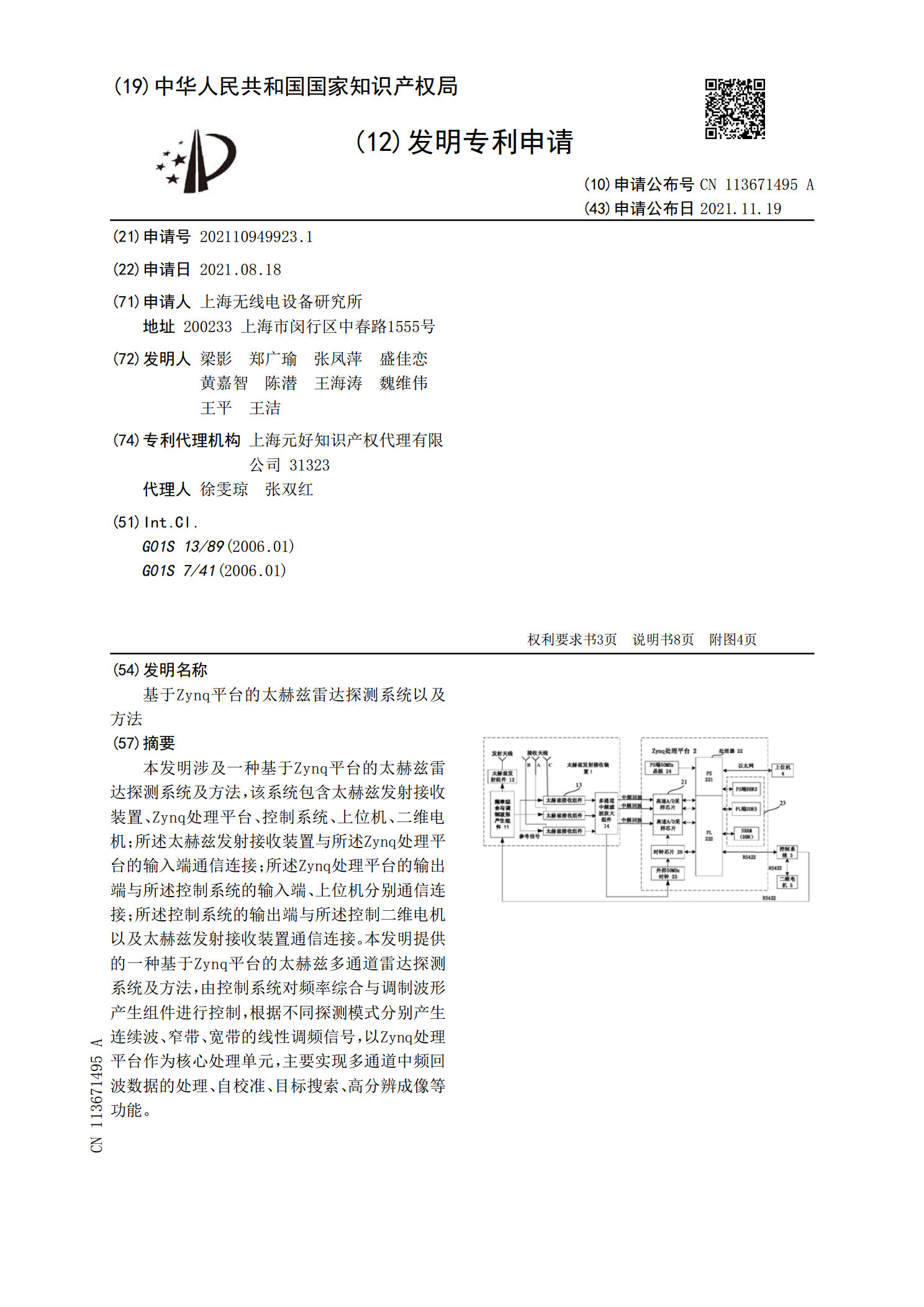
本发明涉及一种基于Zynq平台的太赫兹雷达探测系统及方法,该系统包含太赫兹发射接收装置、Zynq处理平台、控制系统、上位机、二维电机;所述太赫兹发射接收装置与所述Zynq处理平台的输入端通信连接;所述Zynq处理平台的输出端与所述控制系统的输入端、上位机分别通信连接;所述控制系统的输出端与所述控制二维电机以及太赫兹发射接收装置通信连接。本发明提供的一种基于Zynq平台的太赫兹多通道雷达探测系统及方法,由控制系统对频率综合与调制波形产生组件进行控制,根据不同探测模式分别产生连续波、窄带、宽带的线性调频信号,
一种雷达探测装置和雷达探测系统.pdf
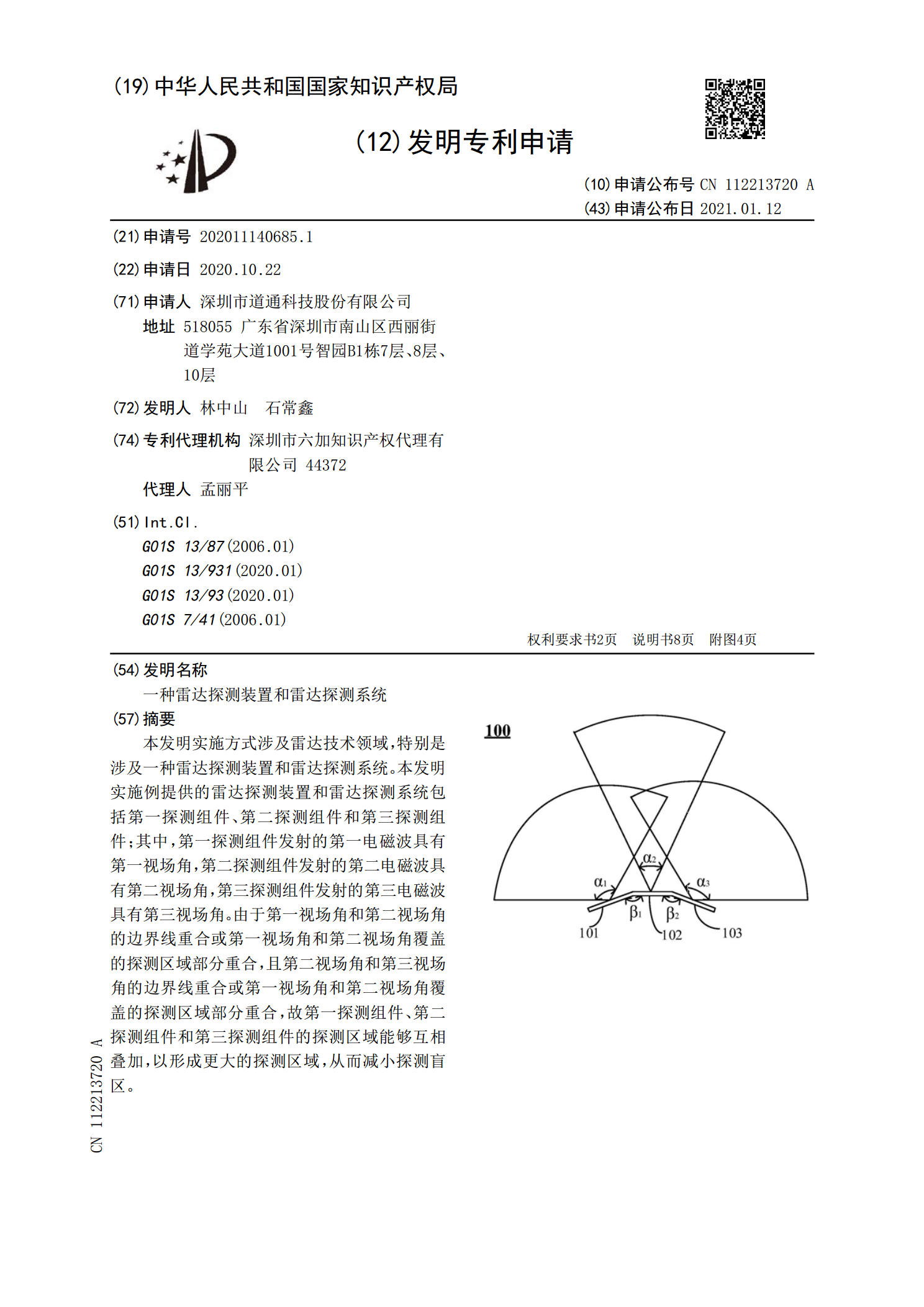
本发明实施方式涉及雷达技术领域,特别是涉及一种雷达探测装置和雷达探测系统。本发明实施例提供的雷达探测装置和雷达探测系统包括第一探测组件、第二探测组件和第三探测组件;其中,第一探测组件发射的第一电磁波具有第一视场角,第二探测组件发射的第二电磁波具有第二视场角,第三探测组件发射的第三电磁波具有第三视场角。由于第一视场角和第二视场角的边界线重合或第一视场角和第二视场角覆盖的探测区域部分重合,且第二视场角和第三视场角的边界线重合或第一视场角和第二视场角覆盖的探测区域部分重合,故第一探测组件、第二探测组件和第三探测