
一种基于动静结合的目标检测方法.pdf

如灵****姐姐


1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于动静结合的目标检测方法.pdf
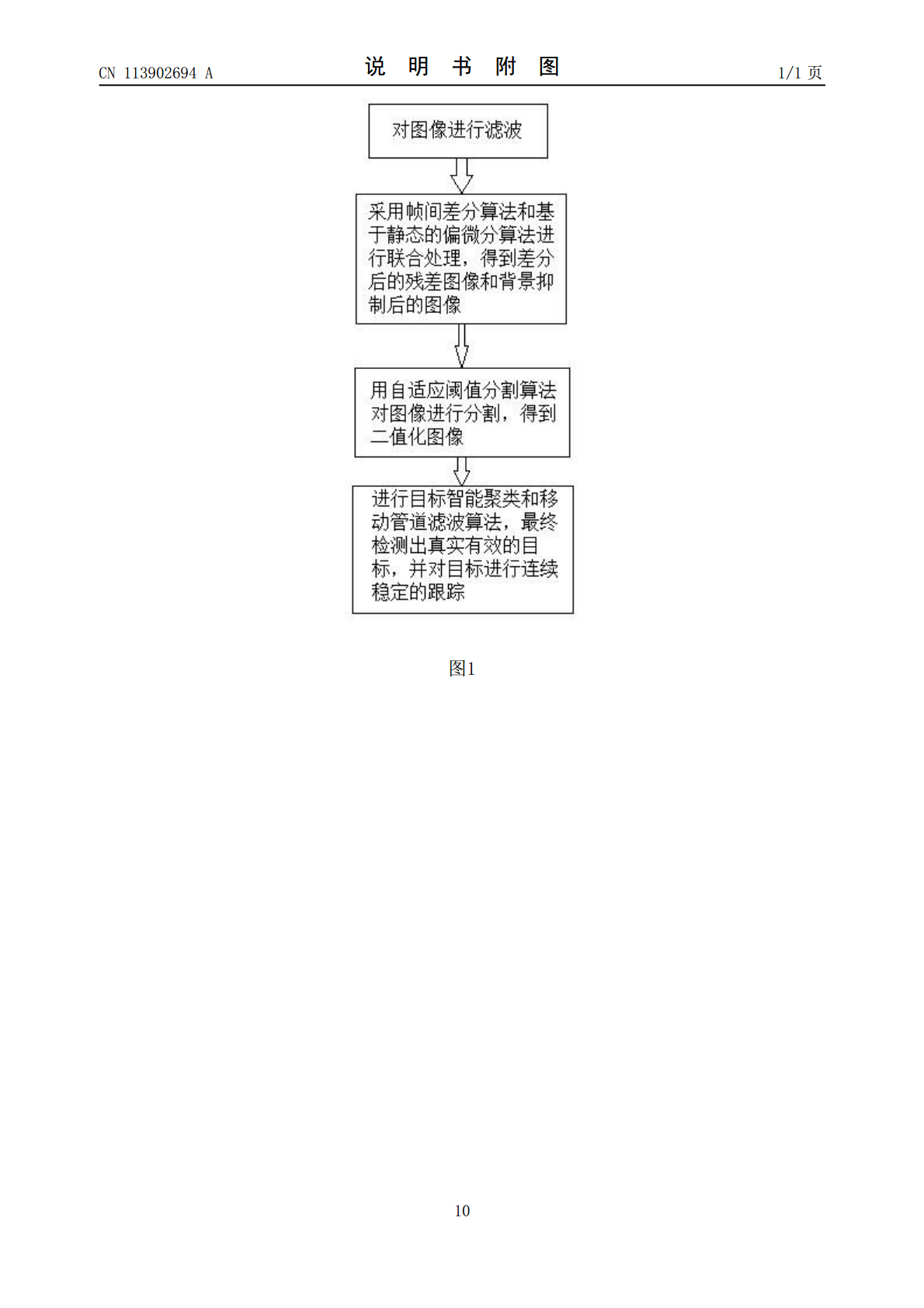
本发明的目的是提供一种基于动静结合的目标检测方法,用于实现连续图像或视频中的目标稳定跟踪,主要技术方案是首先对采集的原始图像进行滤波,实现图像平滑和目标增强;随后采用基于动态的帧间差分算法和基于静态的偏微分算法进行联合处理;接着用自适应阈值分割算法对图像进行分割,得到二值化图像;随后进行目标智能聚类和移动管道滤波算法,最终检测出真实有效的目标,并对目标进行连续稳定的跟踪,设计思路直观,计算复杂度相对较低,可应用到多个平台;算法框架模型可以针对实际使用需求对各个模块参数进行修正,能够应用于针对特定使用需求的
基于动静检测结合的会议轮询中人体目标检测方法及系统.pdf
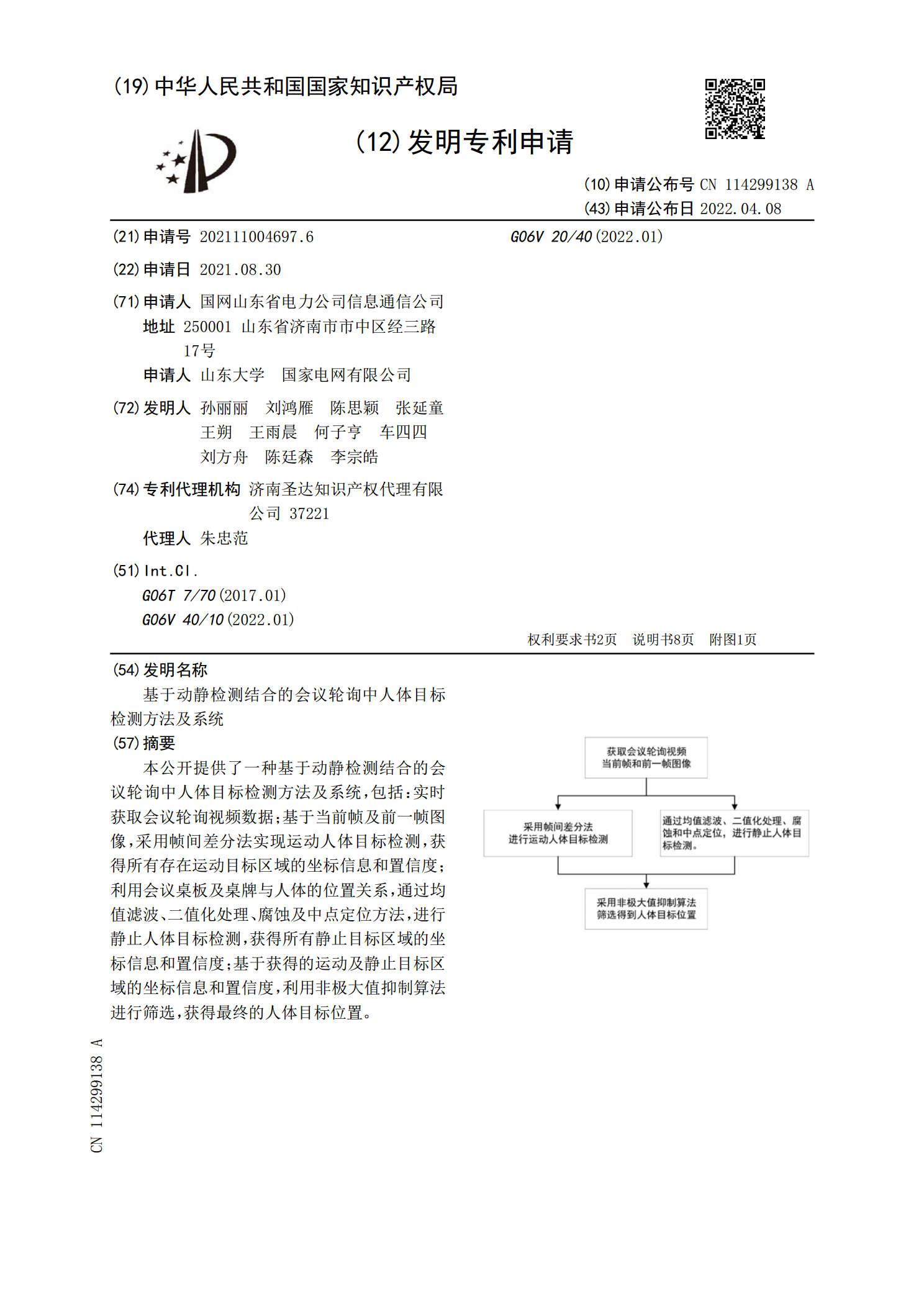
本公开提供了一种基于动静检测结合的会议轮询中人体目标检测方法及系统,包括:实时获取会议轮询视频数据;基于当前帧及前一帧图像,采用帧间差分法实现运动人体目标检测,获得所有存在运动目标区域的坐标信息和置信度;利用会议桌板及桌牌与人体的位置关系,通过均值滤波、二值化处理、腐蚀及中点定位方法,进行静止人体目标检测,获得所有静止目标区域的坐标信息和置信度;基于获得的运动及静止目标区域的坐标信息和置信度,利用非极大值抑制算法进行筛选,获得最终的人体目标位置。

基于动静态方法结合的智能合约漏洞检测的开题报告.docx
基于动静态方法结合的智能合约漏洞检测的开题报告1.选题背景及意义随着智能合约应用的日益普及,以太坊作为最大的智能合约平台之一,已经有了相当大的发展。在分布式金融(DeFi)应用、非同质化代币(NFT)、去中心化交易所(DEX)等领域,智能合约已经成为一个重要的基础设施,其中DeFi和NFT尤为重要。另一方面,不断出现的智能合约漏洞一直是一个令人头疼的难题。据统计,从2016年开始,智能合约已经被攻破超过500次,已经造成了价值数十亿美元的损失。而且,这些漏洞通常是由编程错误或设计错误引起的,很少受到两次审
一种基于穿墙雷达的动静人体目标自适应检测方法及系统.pdf
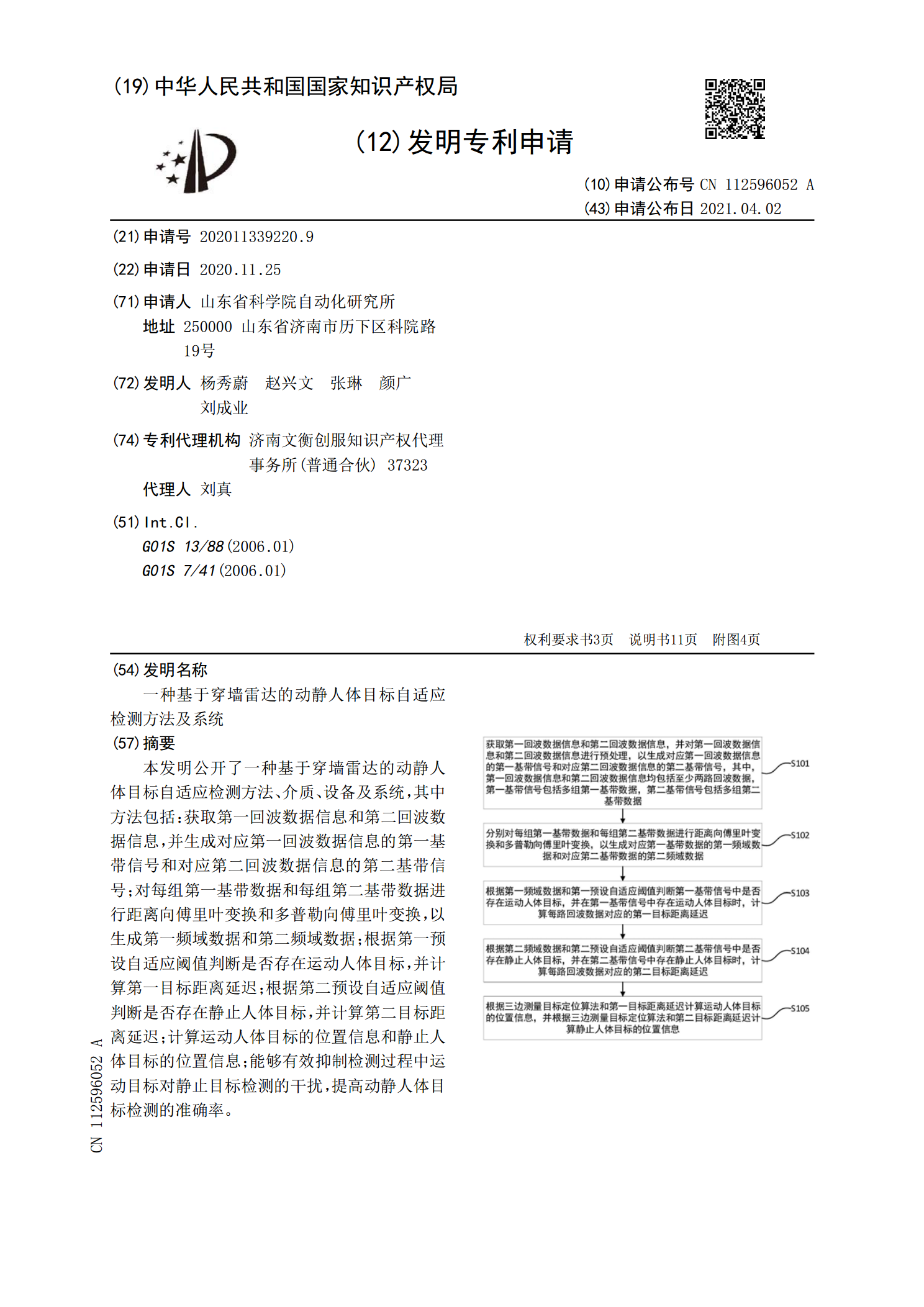
本发明公开了一种基于穿墙雷达的动静人体目标自适应检测方法、介质、设备及系统,其中方法包括:获取第一回波数据信息和第二回波数据信息,并生成对应第一回波数据信息的第一基带信号和对应第二回波数据信息的第二基带信号;对每组第一基带数据和每组第二基带数据进行距离向傅里叶变换和多普勒向傅里叶变换,以生成第一频域数据和第二频域数据;根据第一预设自适应阈值判断是否存在运动人体目标,并计算第一目标距离延迟;根据第二预设自适应阈值判断是否存在静止人体目标,并计算第二目标距离延迟;计算运动人体目标的位置信息和静止人体目标的位置

一种动静态分析结合的Android隐私泄露检测方法.docx
一种动静态分析结合的Android隐私泄露检测方法标题:一种基于动静态分析结合的Android隐私泄露检测方法摘要:在移动应用的快速发展背景下,用户隐私泄露问题显得尤为重要。本论文提出了一种基于动态和静态分析相结合的Android隐私泄露检测方法。该方法首先通过静态分析技术对应用程序的源代码进行分析,提取隐私相关API调用和敏感数据的传输路径。随后,通过动态分析技术在应用程序运行时监控敏感数据的使用情况和API调用行为,检测是否存在隐私泄露行为。实验证明,该方法能够有效地检测出Android应用中的隐私泄