
一种基于灵活时空网络模型的AGV路径规划方法.pdf

Ch****91

1/10
2/10
3/10
4/10
5/10
6/10
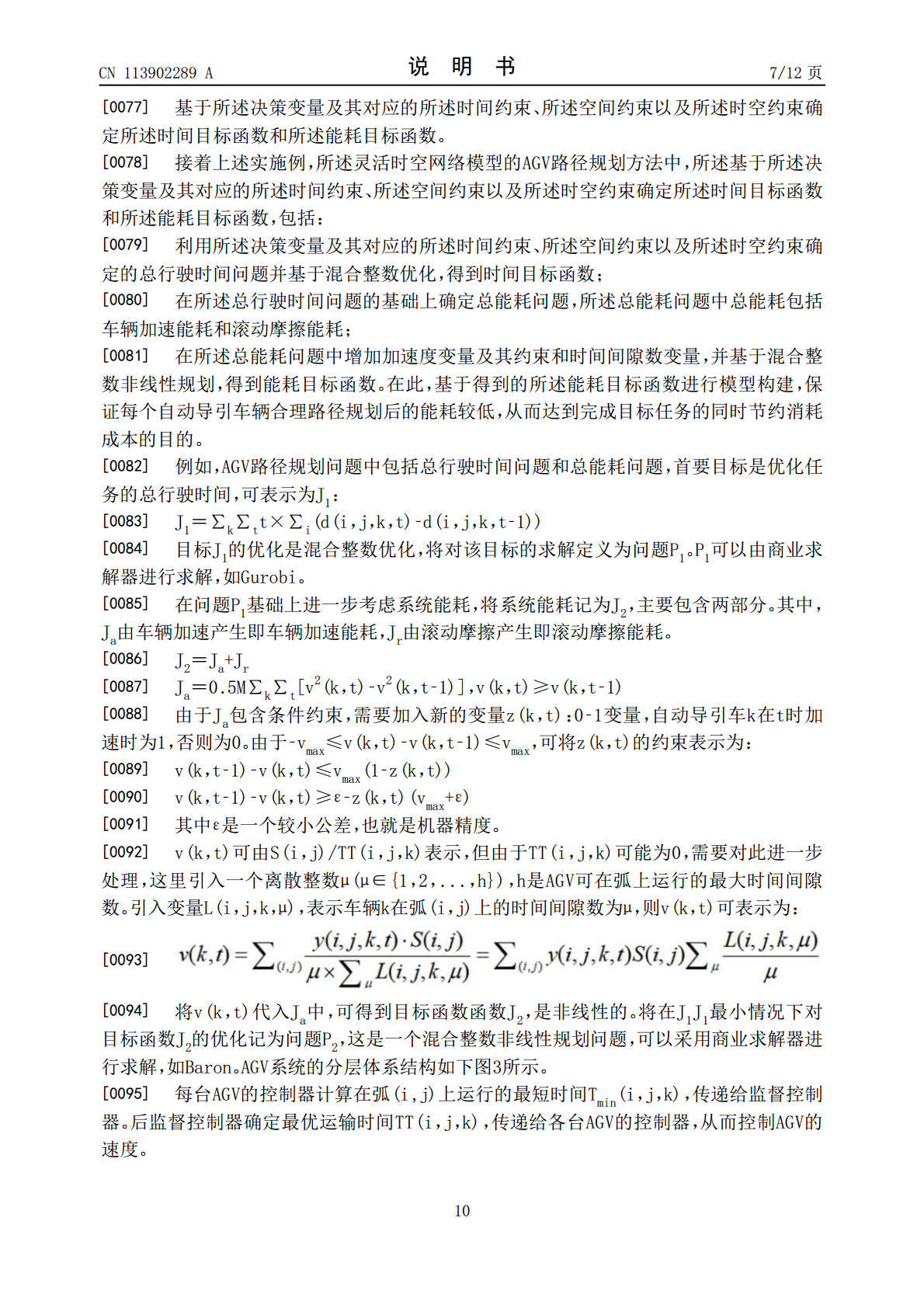
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于灵活时空网络模型的AGV路径规划方法.pdf
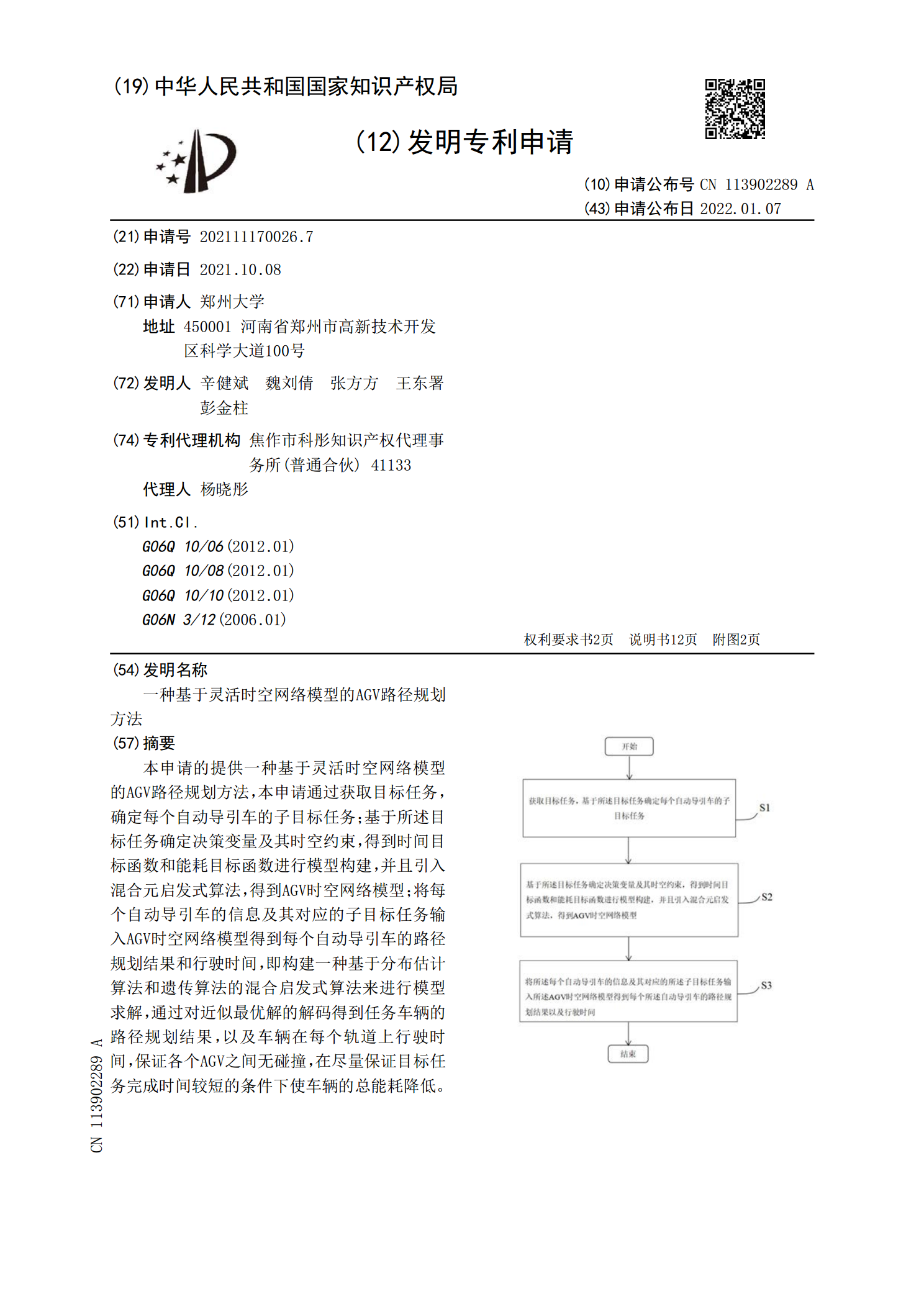
本申请的提供一种基于灵活时空网络模型的AGV路径规划方法,本申请通过获取目标任务,确定每个自动导引车的子目标任务;基于所述目标任务确定决策变量及其时空约束,得到时间目标函数和能耗目标函数进行模型构建,并且引入混合元启发式算法,得到AGV时空网络模型;将每个自动导引车的信息及其对应的子目标任务输入AGV时空网络模型得到每个自动导引车的路径规划结果和行驶时间,即构建一种基于分布估计算法和遗传算法的混合启发式算法来进行模型求解,通过对近似最优解的解码得到任务车辆的路径规划结果,以及车辆在每个轨道上行驶时间,保证
一种基于ROS的工厂AGV路径规划方法.pdf
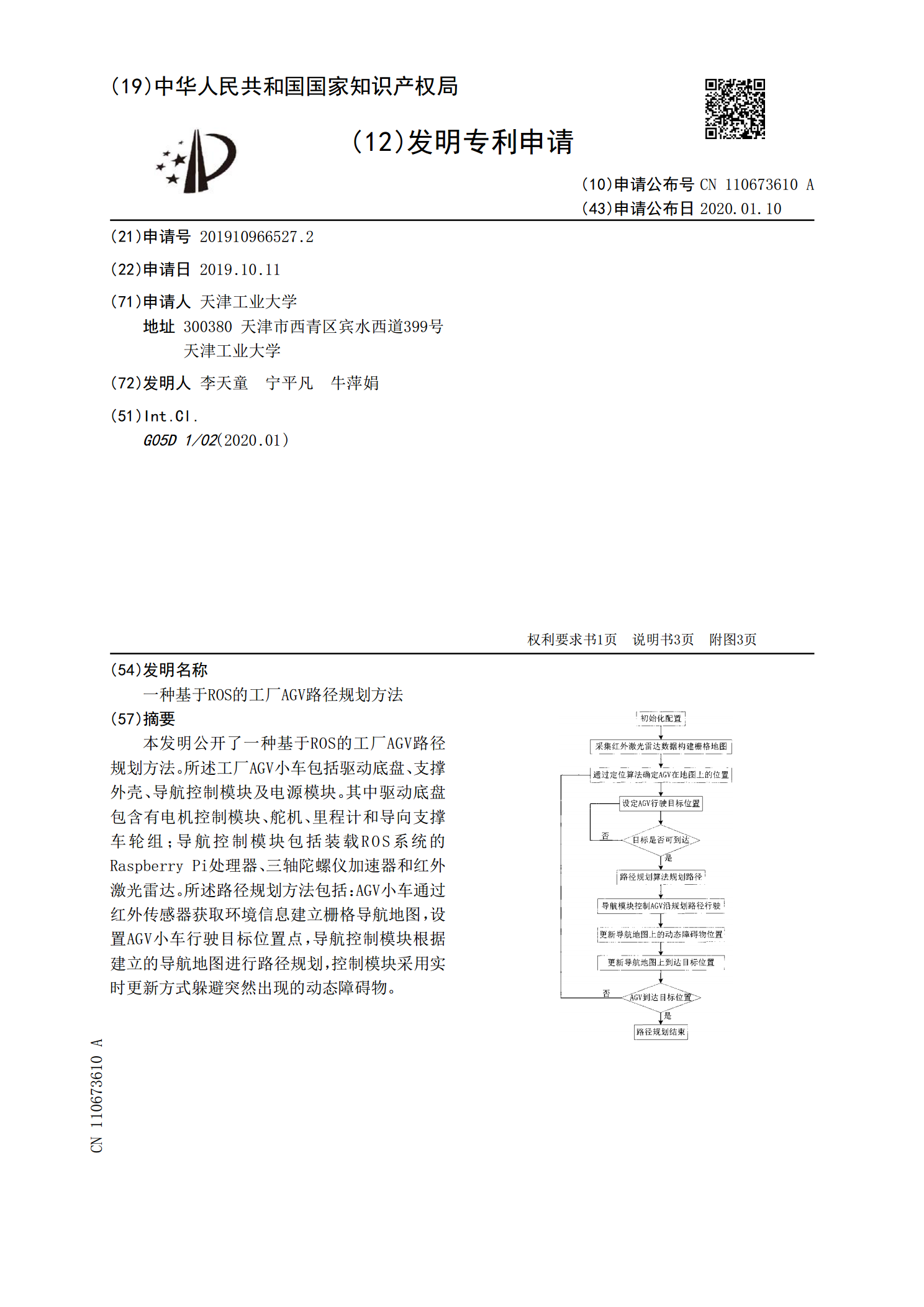
本发明公开了一种基于ROS的工厂AGV路径规划方法。所述工厂AGV小车包括驱动底盘、支撑外壳、导航控制模块及电源模块。其中驱动底盘包含有电机控制模块、舵机、里程计和导向支撑车轮组;导航控制模块包括装载ROS系统的RaspberryPi处理器、三轴陀螺仪加速器和红外激光雷达。所述路径规划方法包括:AGV小车通过红外传感器获取环境信息建立栅格导航地图,设置AGV小车行驶目标位置点,导航控制模块根据建立的导航地图进行路径规划,控制模块采用实时更新方式躲避突然出现的动态障碍物。
一种基于栅格地图模型的改进AGV路径规划算法.pdf
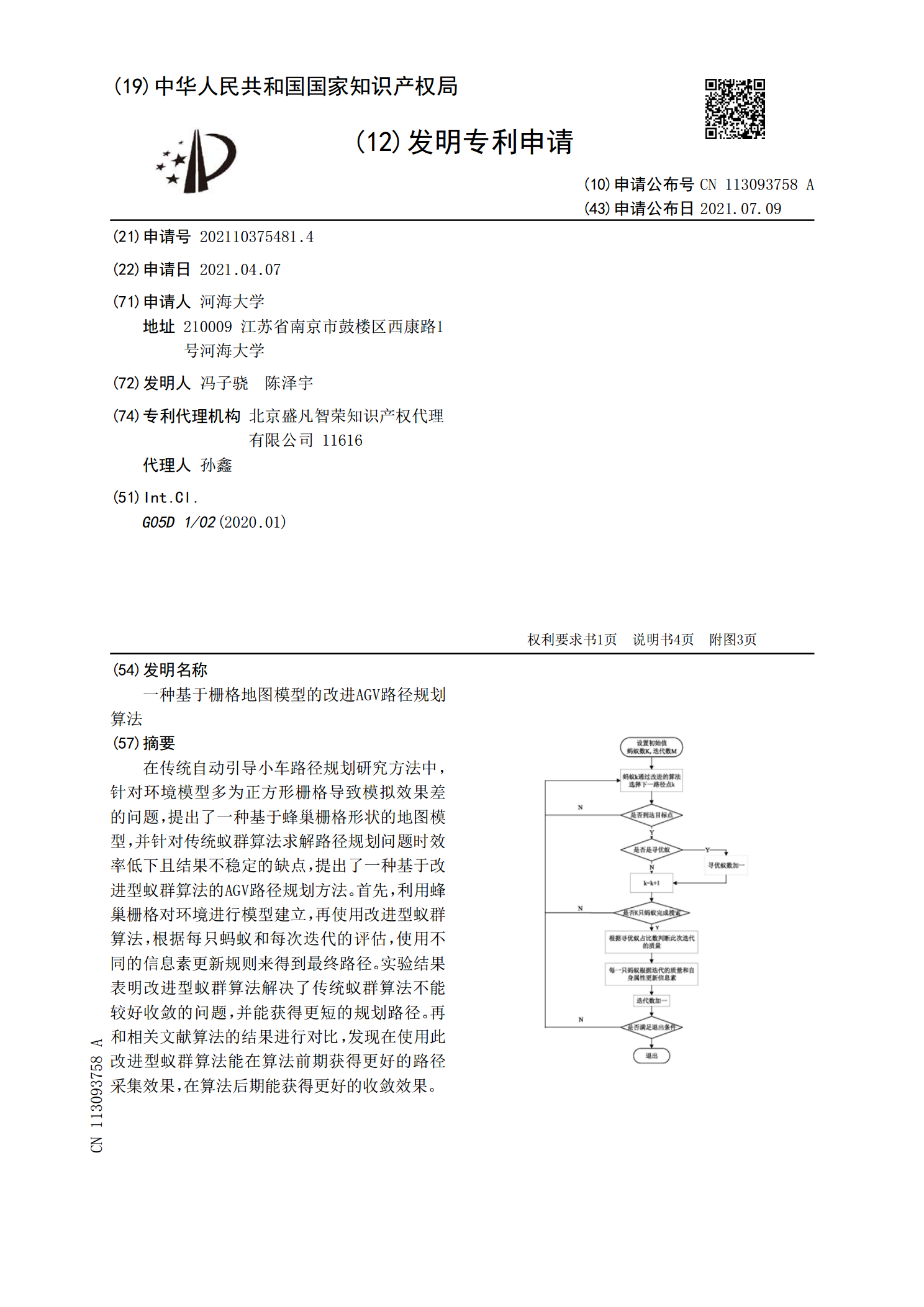
在传统自动引导小车路径规划研究方法中,针对环境模型多为正方形栅格导致模拟效果差的问题,提出了一种基于蜂巢栅格形状的地图模型,并针对传统蚁群算法求解路径规划问题时效率低下且结果不稳定的缺点,提出了一种基于改进型蚁群算法的AGV路径规划方法。首先,利用蜂巢栅格对环境进行模型建立,再使用改进型蚁群算法,根据每只蚂蚁和每次迭代的评估,使用不同的信息素更新规则来得到最终路径。实验结果表明改进型蚁群算法解决了传统蚁群算法不能较好收敛的问题,并能获得更短的规划路径。再和相关文献算法的结果进行对比,发现在使用此改进型蚁群
基于时空路网模型的最优路径规划的处理方法及系统.pdf
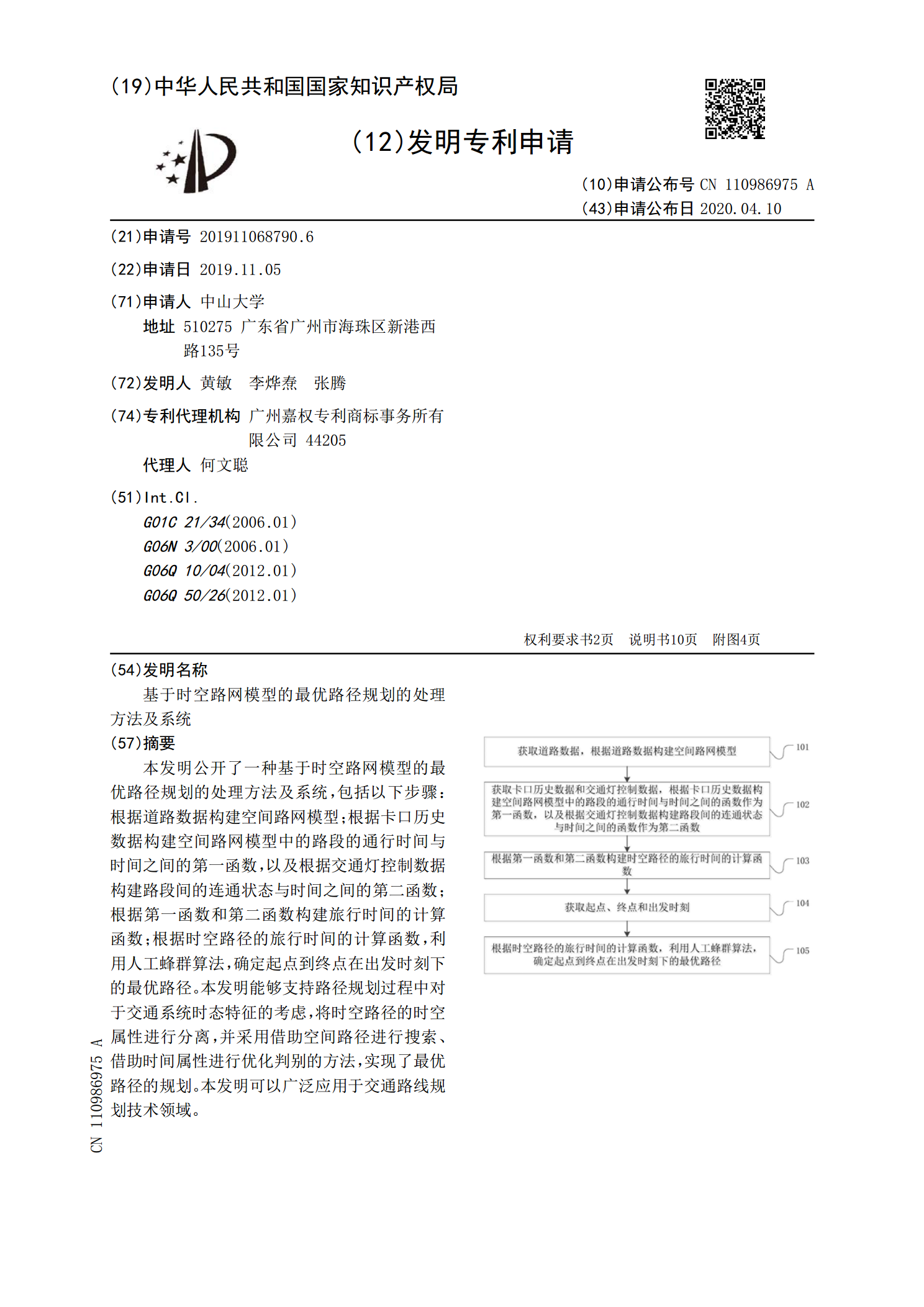
本发明公开了一种基于时空路网模型的最优路径规划的处理方法及系统,包括以下步骤:根据道路数据构建空间路网模型;根据卡口历史数据构建空间路网模型中的路段的通行时间与时间之间的第一函数,以及根据交通灯控制数据构建路段间的连通状态与时间之间的第二函数;根据第一函数和第二函数构建旅行时间的计算函数;根据时空路径的旅行时间的计算函数,利用人工蜂群算法,确定起点到终点在出发时刻下的最优路径。本发明能够支持路径规划过程中对于交通系统时态特征的考虑,将时空路径的时空属性进行分离,并采用借助空间路径进行搜索、借助时间属性进行

一种基于最短路径深度优化算法的AGV路径规划方法.pdf
本发明涉及一种基于最短路径深度优化算法的AGV路径规划方法,包括:PC机调度系统接收任务请求并将请求信息发送至每台AGV车载监控管理系统;AGV车载监控管理系统将执行任务AGV的位置信息和任务请求的位置信息传递至路径优化系统;路径优化系统将最优路径的信息反馈至PC机调度系统中;AGV完成任务后,将任务完成信息反馈至PC机调度系统。本发明重新梳理AGV路径规划系统的详细优化步骤,去除传统AGV的过度复杂的流程,在保留关键流程节点的基础之上,重新规划AGV系统各个模块之间的协调工作关系。