
一种基于栅格地图模型的改进AGV路径规划算法.pdf

丹烟****魔王

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于栅格地图模型的改进AGV路径规划算法.pdf
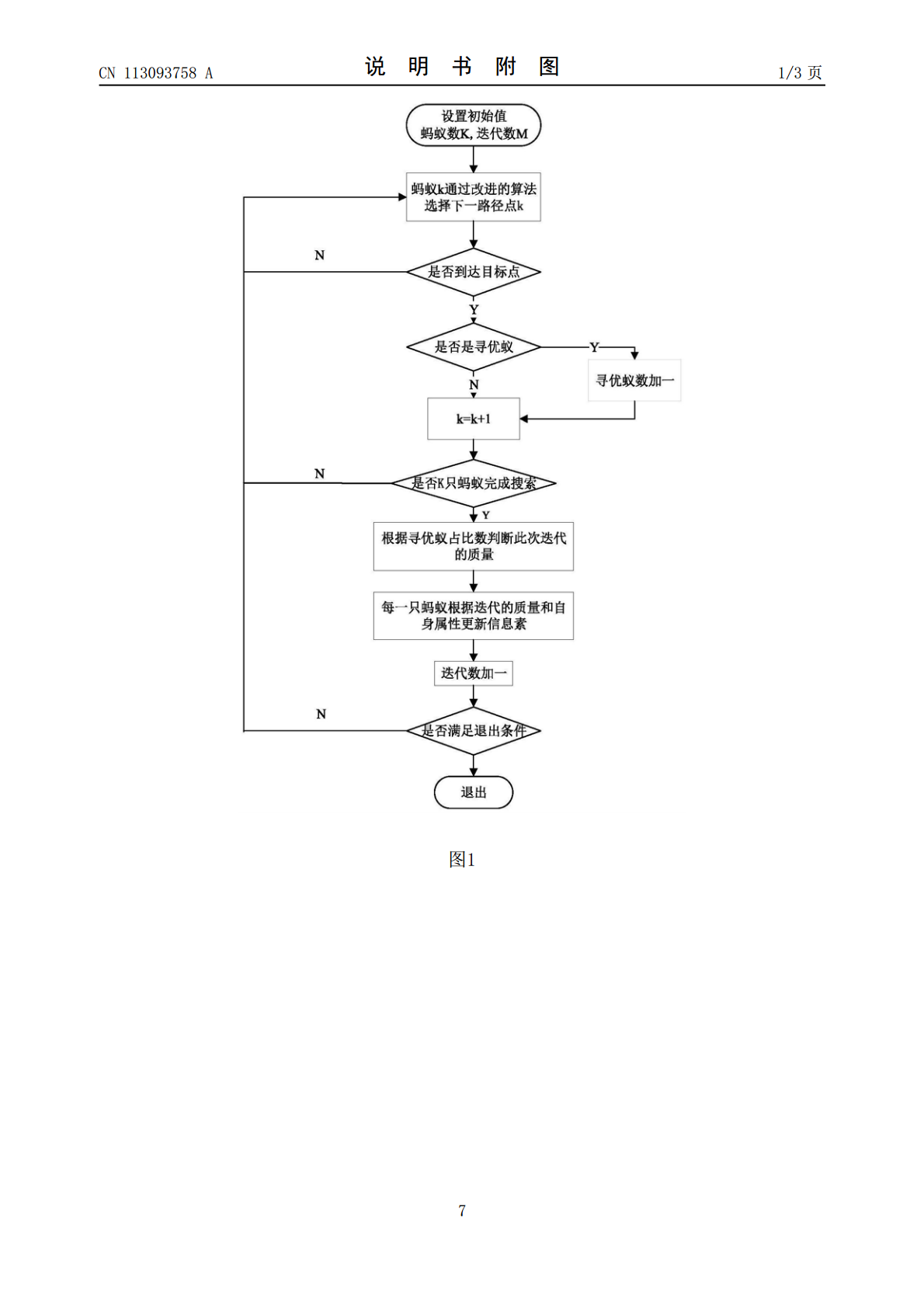
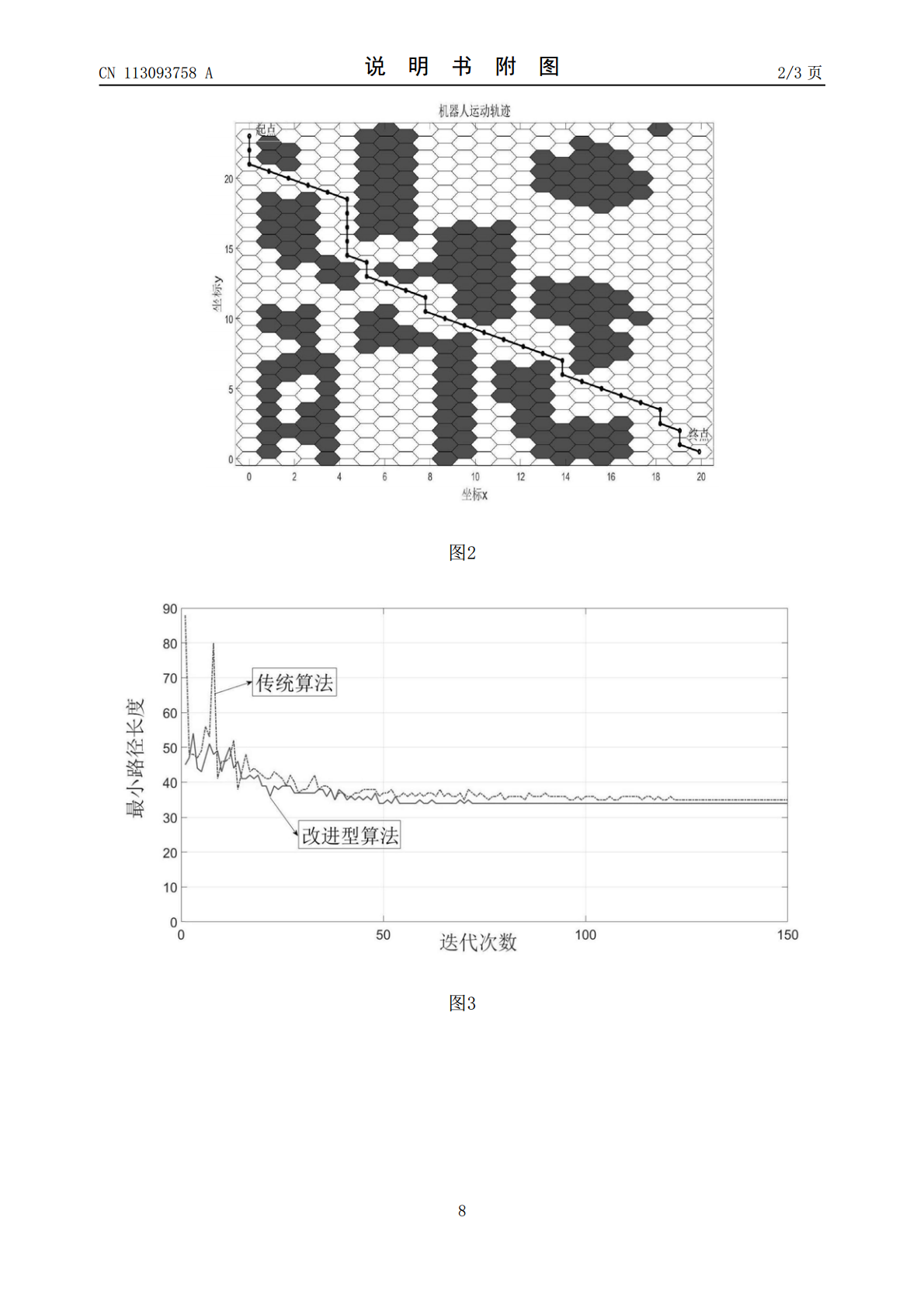
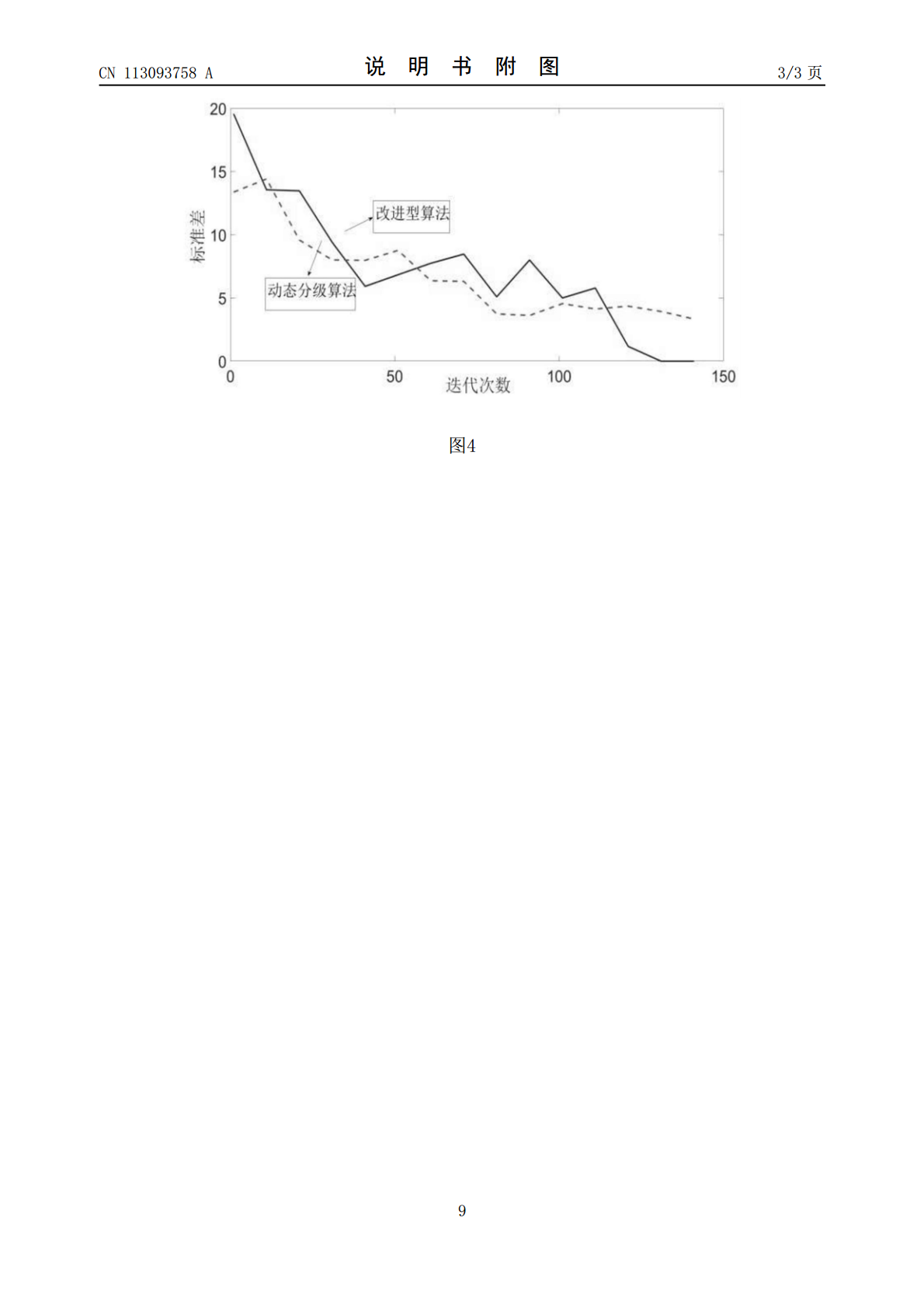
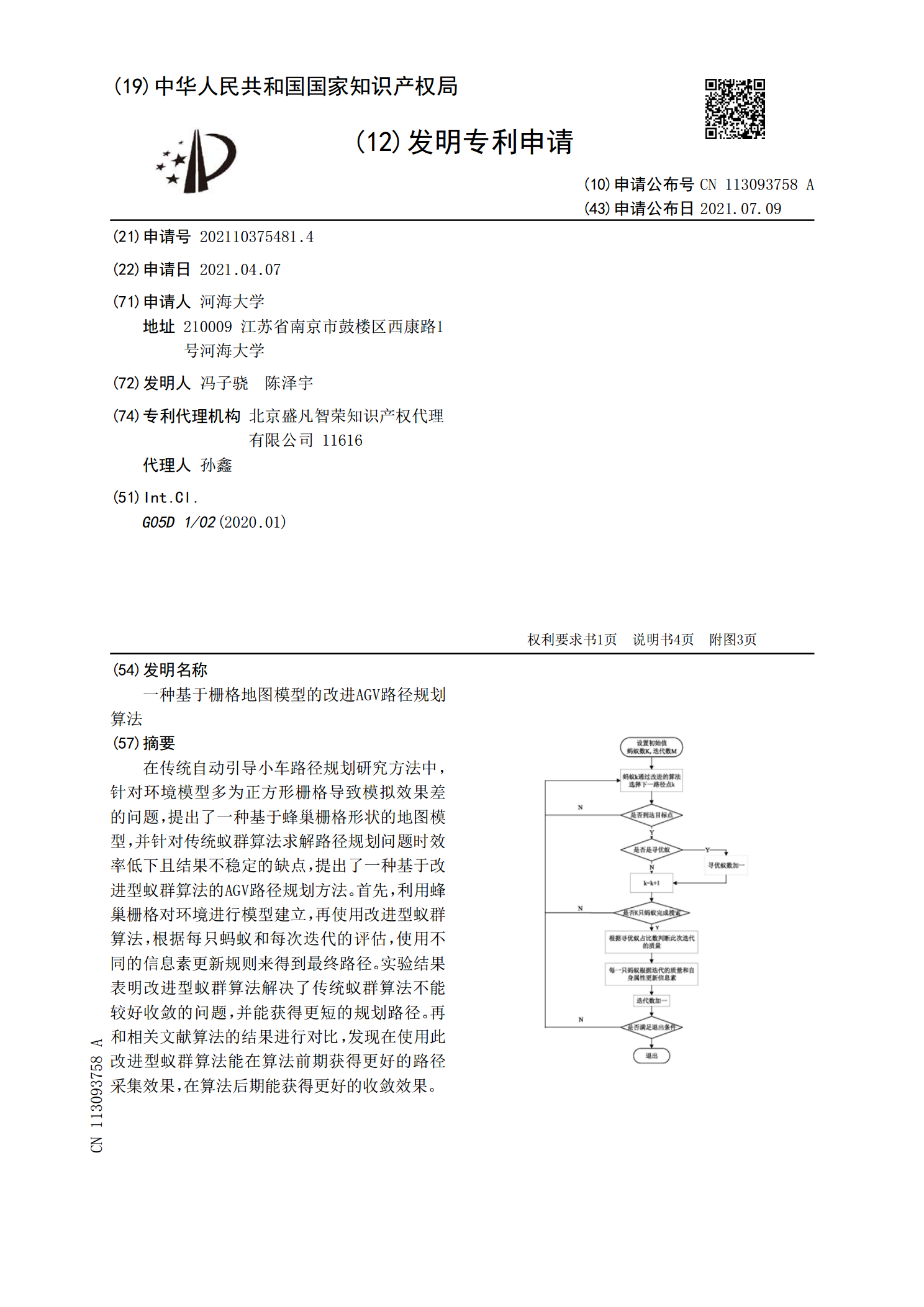
在传统自动引导小车路径规划研究方法中,针对环境模型多为正方形栅格导致模拟效果差的问题,提出了一种基于蜂巢栅格形状的地图模型,并针对传统蚁群算法求解路径规划问题时效率低下且结果不稳定的缺点,提出了一种基于改进型蚁群算法的AGV路径规划方法。首先,利用蜂巢栅格对环境进行模型建立,再使用改进型蚁群算法,根据每只蚂蚁和每次迭代的评估,使用不同的信息素更新规则来得到最终路径。实验结果表明改进型蚁群算法解决了传统蚁群算法不能较好收敛的问题,并能获得更短的规划路径。再和相关文献算法的结果进行对比,发现在使用此改进型蚁群
基于地图栅格与QPSO算法结合的机器人路径规划方法.pdf
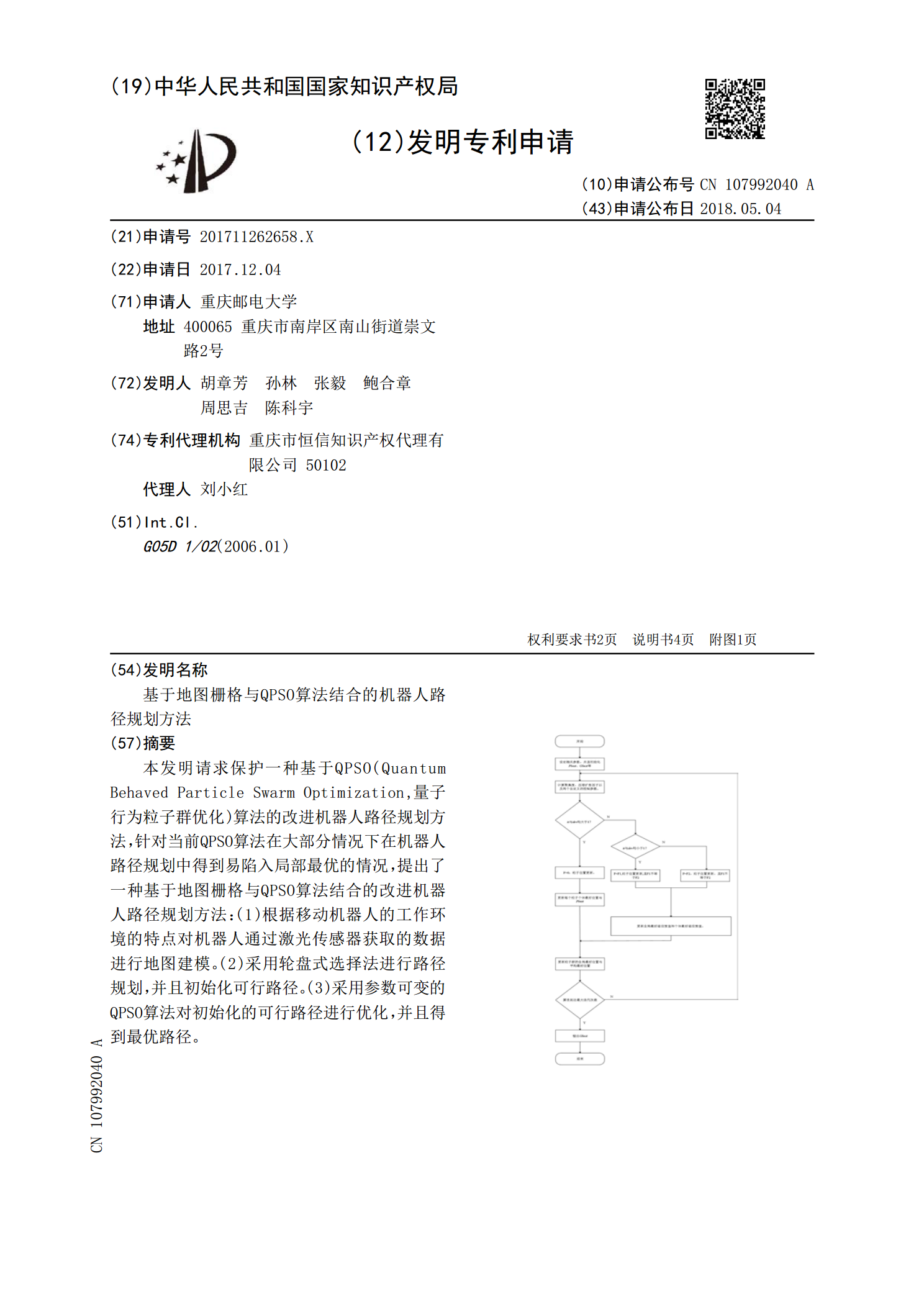
本发明请求保护一种基于QPSO(QuantumBehavedParticleSwarmOptimization,量子行为粒子群优化)算法的改进机器人路径规划方法,针对当前QPSO算法在大部分情况下在机器人路径规划中得到易陷入局部最优的情况,提出了一种基于地图栅格与QPSO算法结合的改进机器人路径规划方法:(1)根据移动机器人的工作环境的特点对机器人通过激光传感器获取的数据进行地图建模。(2)采用轮盘式选择法进行路径规划,并且初始化可行路径。(3)采用参数可变的QPSO算法对初始化的可行路径进行优化

一种基于最短路径深度优化算法的AGV路径规划方法.pdf
本发明涉及一种基于最短路径深度优化算法的AGV路径规划方法,包括:PC机调度系统接收任务请求并将请求信息发送至每台AGV车载监控管理系统;AGV车载监控管理系统将执行任务AGV的位置信息和任务请求的位置信息传递至路径优化系统;路径优化系统将最优路径的信息反馈至PC机调度系统中;AGV完成任务后,将任务完成信息反馈至PC机调度系统。本发明重新梳理AGV路径规划系统的详细优化步骤,去除传统AGV的过度复杂的流程,在保留关键流程节点的基础之上,重新规划AGV系统各个模块之间的协调工作关系。
一种基于蚁群算法的室内AGV路径规划方法.pdf
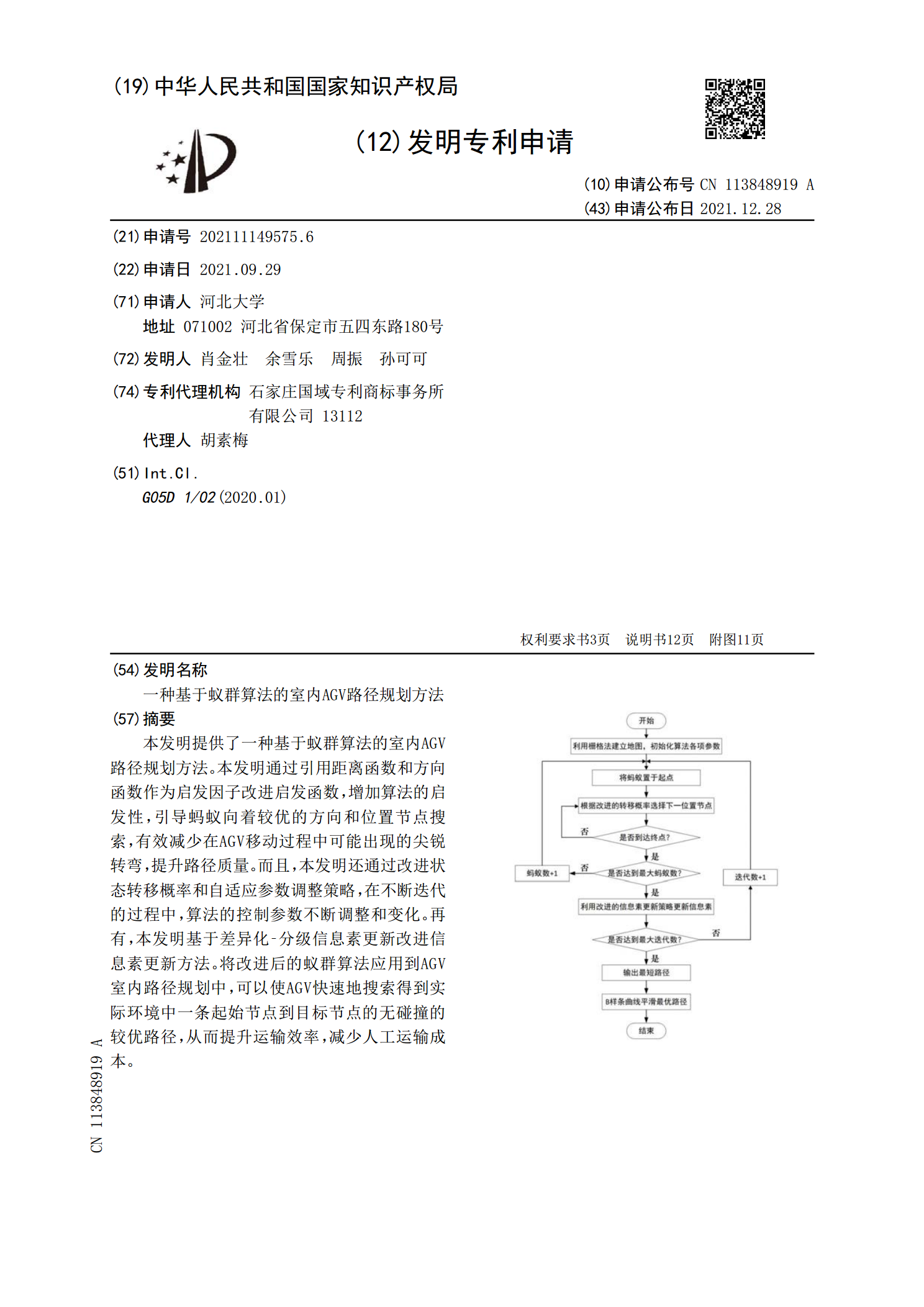
本发明提供了一种基于蚁群算法的室内AGV路径规划方法。本发明通过引用距离函数和方向函数作为启发因子改进启发函数,增加算法的启发性,引导蚂蚁向着较优的方向和位置节点搜索,有效减少在AGV移动过程中可能出现的尖锐转弯,提升路径质量。而且,本发明还通过改进状态转移概率和自适应参数调整策略,在不断迭代的过程中,算法的控制参数不断调整和变化。再有,本发明基于差异化‑分级信息素更新改进信息素更新方法。将改进后的蚁群算法应用到AGV室内路径规划中,可以使AGV快速地搜索得到实际环境中一条起始节点到目标节点的无碰撞的较优
一种基于灵活时空网络模型的AGV路径规划方法.pdf
本申请的提供一种基于灵活时空网络模型的AGV路径规划方法,本申请通过获取目标任务,确定每个自动导引车的子目标任务;基于所述目标任务确定决策变量及其时空约束,得到时间目标函数和能耗目标函数进行模型构建,并且引入混合元启发式算法,得到AGV时空网络模型;将每个自动导引车的信息及其对应的子目标任务输入AGV时空网络模型得到每个自动导引车的路径规划结果和行驶时间,即构建一种基于分布估计算法和遗传算法的混合启发式算法来进行模型求解,通过对近似最优解的解码得到任务车辆的路径规划结果,以及车辆在每个轨道上行驶时间,保证