
一种基于ROS的工厂AGV路径规划方法.pdf

霞英****娘子

1/8
2/8

3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于ROS的工厂AGV路径规划方法.pdf
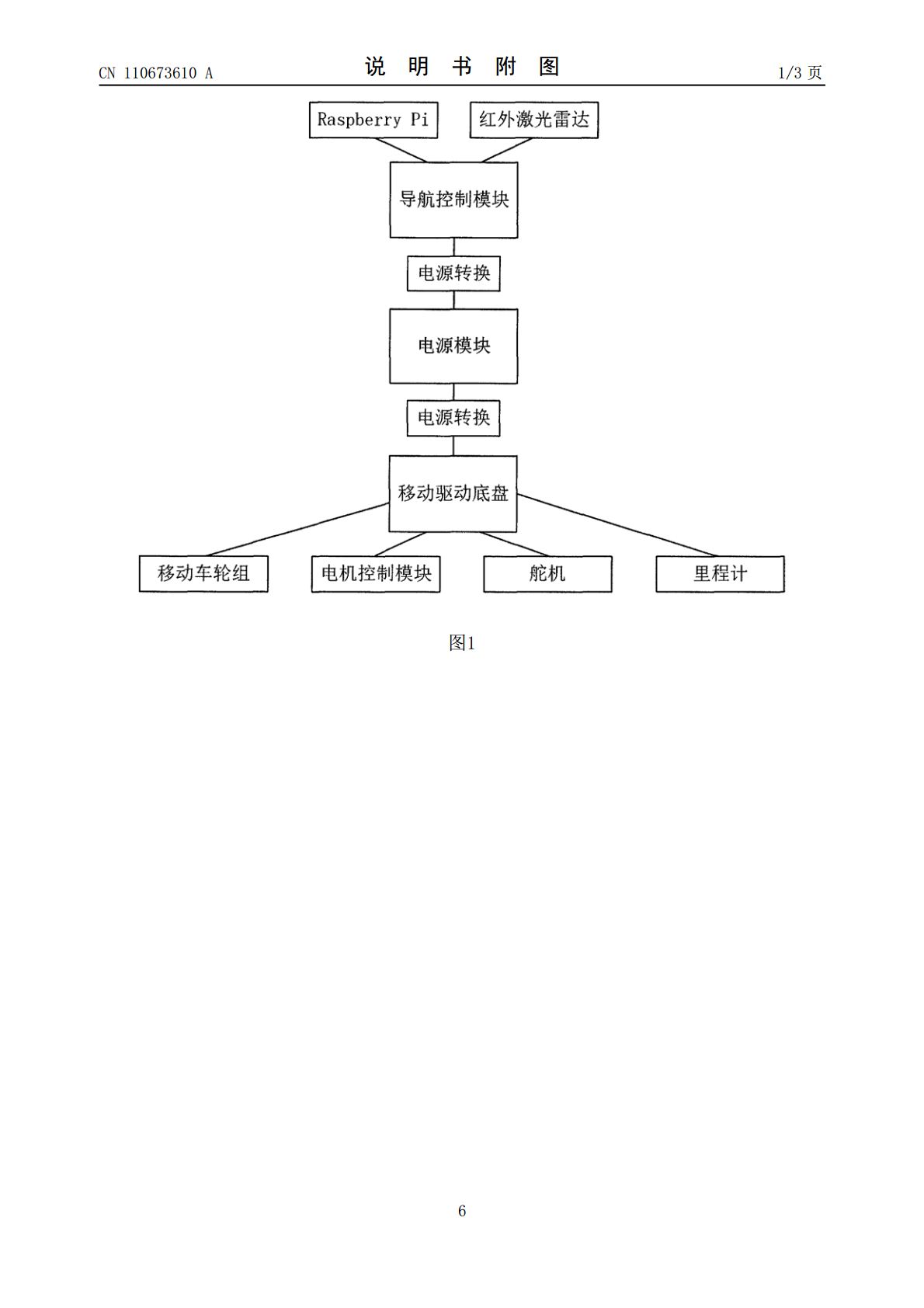
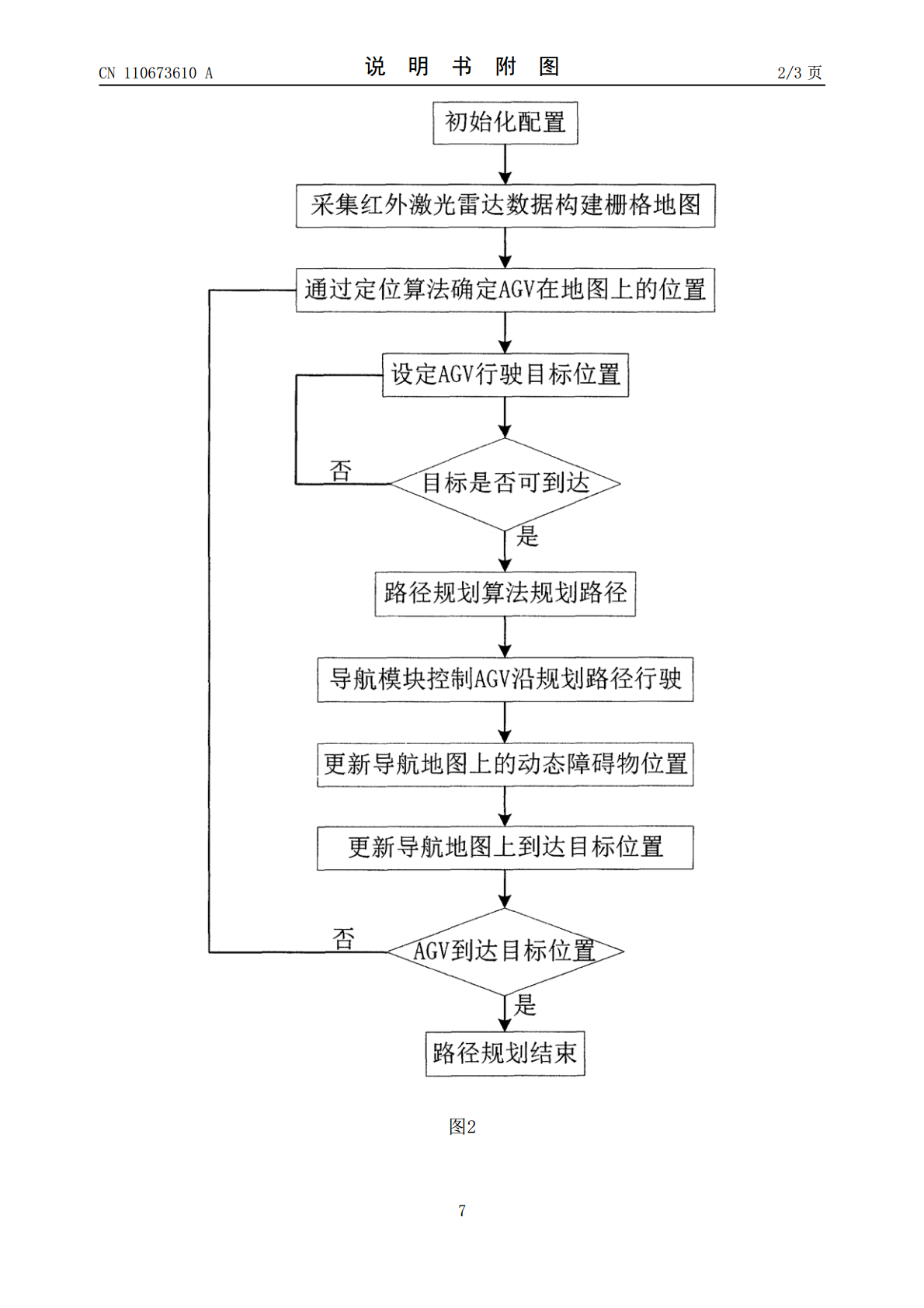
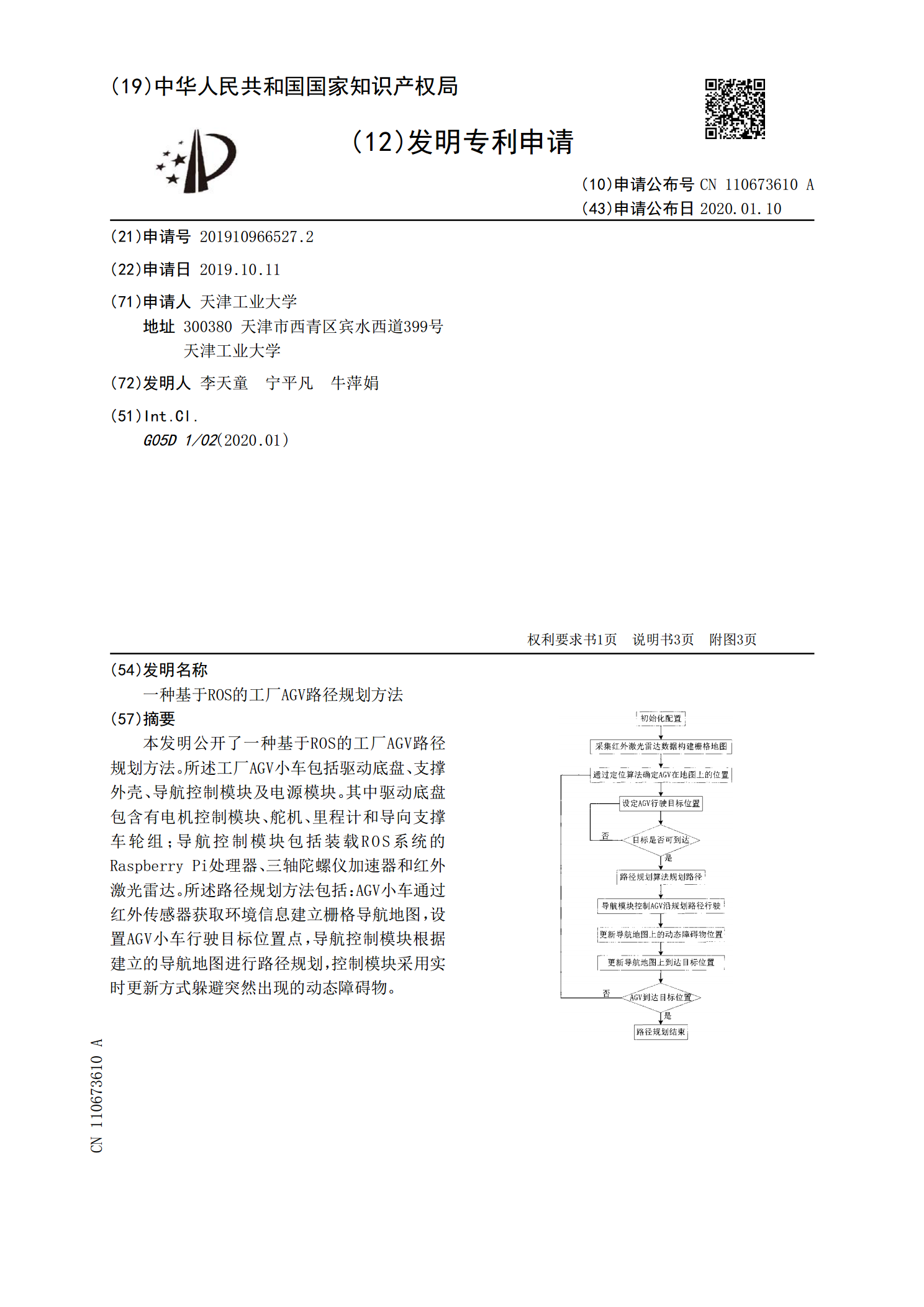
本发明公开了一种基于ROS的工厂AGV路径规划方法。所述工厂AGV小车包括驱动底盘、支撑外壳、导航控制模块及电源模块。其中驱动底盘包含有电机控制模块、舵机、里程计和导向支撑车轮组;导航控制模块包括装载ROS系统的RaspberryPi处理器、三轴陀螺仪加速器和红外激光雷达。所述路径规划方法包括:AGV小车通过红外传感器获取环境信息建立栅格导航地图,设置AGV小车行驶目标位置点,导航控制模块根据建立的导航地图进行路径规划,控制模块采用实时更新方式躲避突然出现的动态障碍物。
一种基于ROS的AGV及其使用方法.pdf
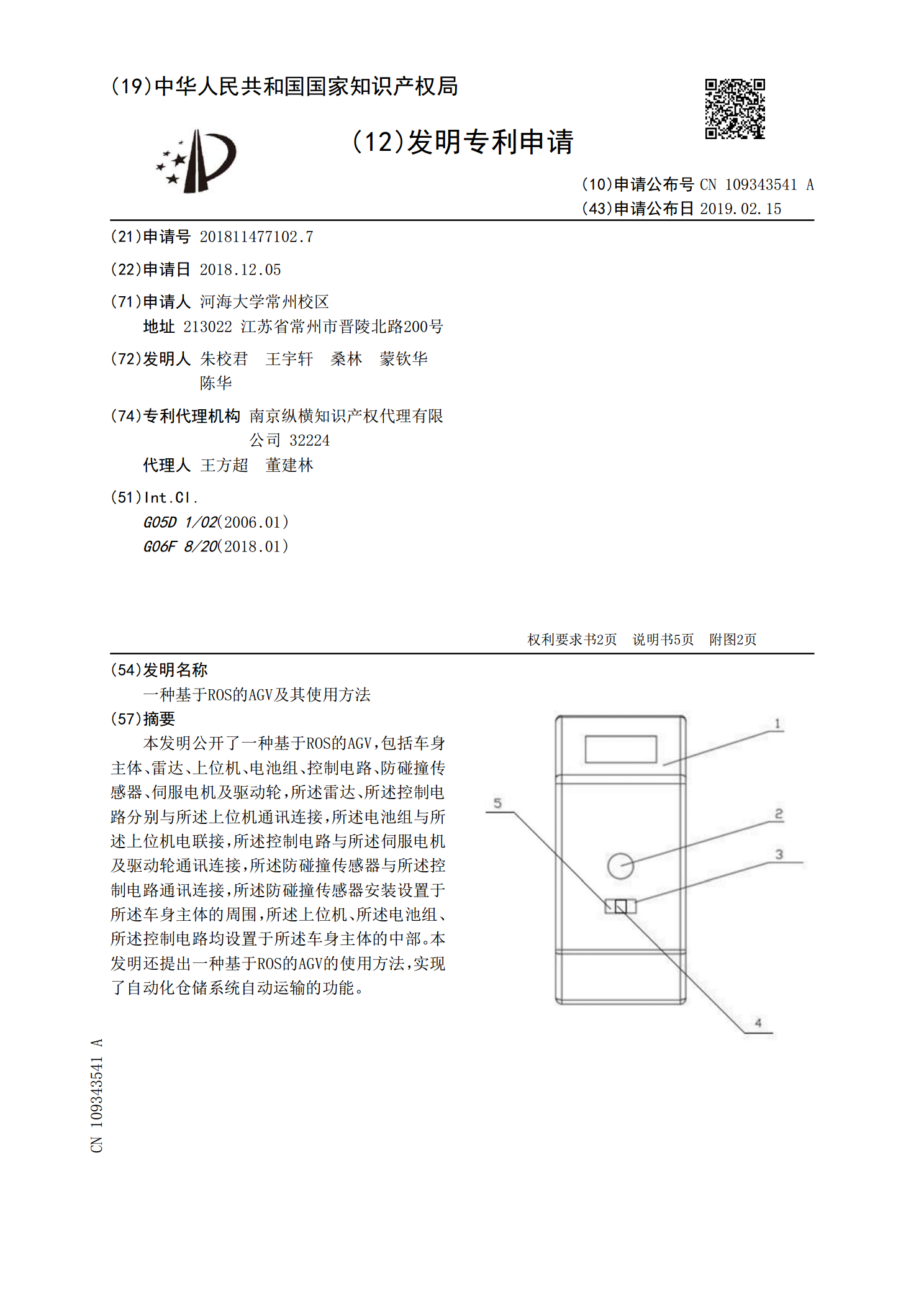
本发明公开了一种基于ROS的AGV,包括车身主体、雷达、上位机、电池组、控制电路、防碰撞传感器、伺服电机及驱动轮,所述雷达、所述控制电路分别与所述上位机通讯连接,所述电池组与所述上位机电联接,所述控制电路与所述伺服电机及驱动轮通讯连接,所述防碰撞传感器与所述控制电路通讯连接,所述防碰撞传感器安装设置于所述车身主体的周围,所述上位机、所述电池组、所述控制电路均设置于所述车身主体的中部。本发明还提出一种基于ROS的AGV的使用方法,实现了自动化仓储系统自动运输的功能。

一种基于最短路径深度优化算法的AGV路径规划方法.pdf
本发明涉及一种基于最短路径深度优化算法的AGV路径规划方法,包括:PC机调度系统接收任务请求并将请求信息发送至每台AGV车载监控管理系统;AGV车载监控管理系统将执行任务AGV的位置信息和任务请求的位置信息传递至路径优化系统;路径优化系统将最优路径的信息反馈至PC机调度系统中;AGV完成任务后,将任务完成信息反馈至PC机调度系统。本发明重新梳理AGV路径规划系统的详细优化步骤,去除传统AGV的过度复杂的流程,在保留关键流程节点的基础之上,重新规划AGV系统各个模块之间的协调工作关系。
一种基于蚁群算法的室内AGV路径规划方法.pdf
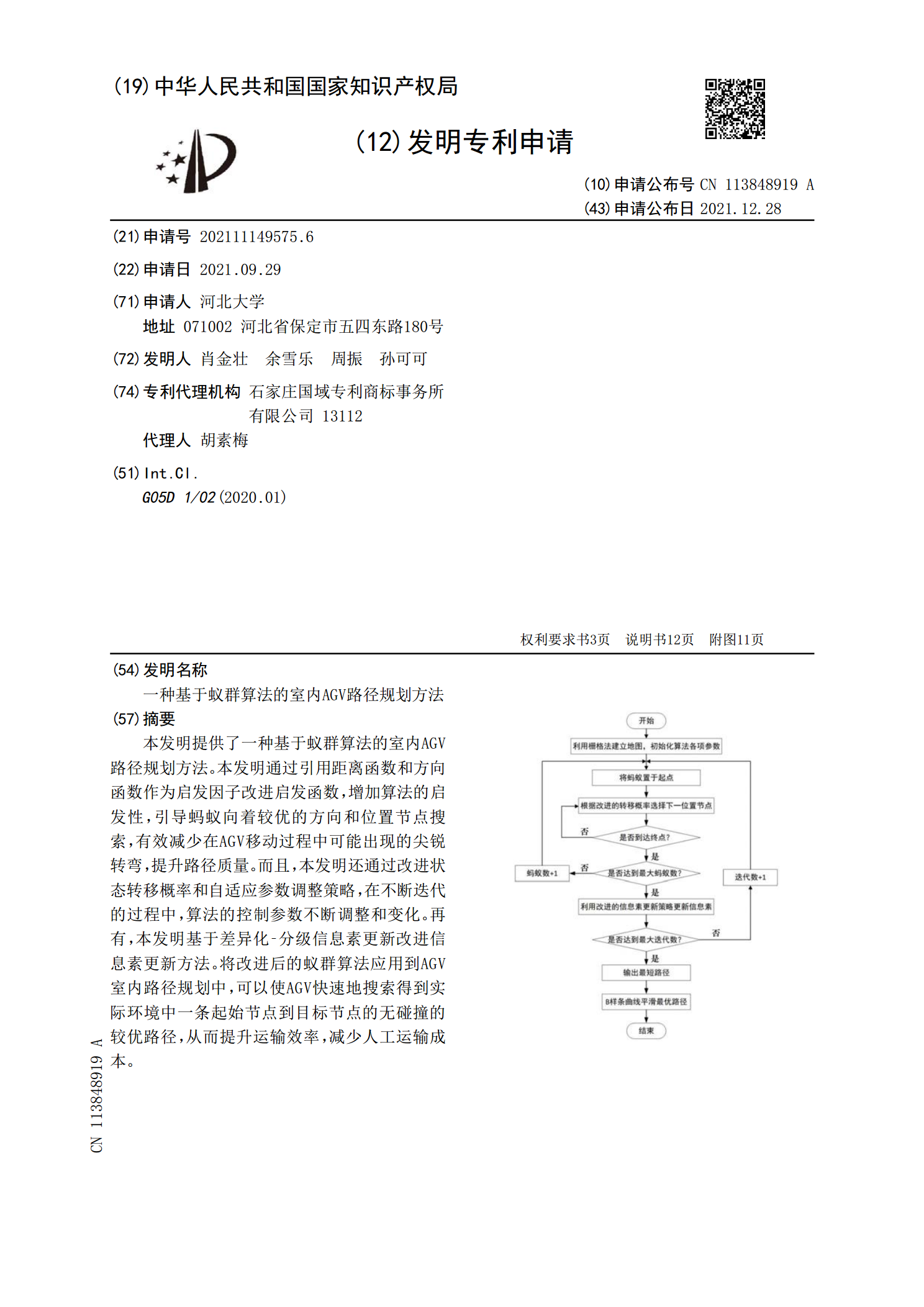
本发明提供了一种基于蚁群算法的室内AGV路径规划方法。本发明通过引用距离函数和方向函数作为启发因子改进启发函数,增加算法的启发性,引导蚂蚁向着较优的方向和位置节点搜索,有效减少在AGV移动过程中可能出现的尖锐转弯,提升路径质量。而且,本发明还通过改进状态转移概率和自适应参数调整策略,在不断迭代的过程中,算法的控制参数不断调整和变化。再有,本发明基于差异化‑分级信息素更新改进信息素更新方法。将改进后的蚁群算法应用到AGV室内路径规划中,可以使AGV快速地搜索得到实际环境中一条起始节点到目标节点的无碰撞的较优

基于改进遗传算法的工厂AGV安全路径规划.docx
基于改进遗传算法的工厂AGV安全路径规划工厂AGV(自动导引车)的安全路径规划是一个重要且具有挑战性的课题,它直接关系到工厂生产效率和员工安全。由于工厂AGV在工厂生产过程中扮演了重要的角色,因此必须通过一定的算法来确保其能够在高效和安全的情况下运行。在本文中,将介绍一种基于改进遗传算法的工厂AGV安全路径规划算法。首先,我们首先需要确定工厂AGV的安全路径规划的目标和约束条件。该目标是为了使工厂AGV能够在最短的时间内到达目的地,同时保证车辆和周围环境的安全。对于约束条件,主要包括车辆最大速度、转向半径