
基于三维特征约束的单目深度图像位姿优化方法.pdf

一条****淑淑

1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于三维特征约束的单目深度图像位姿优化方法.pdf
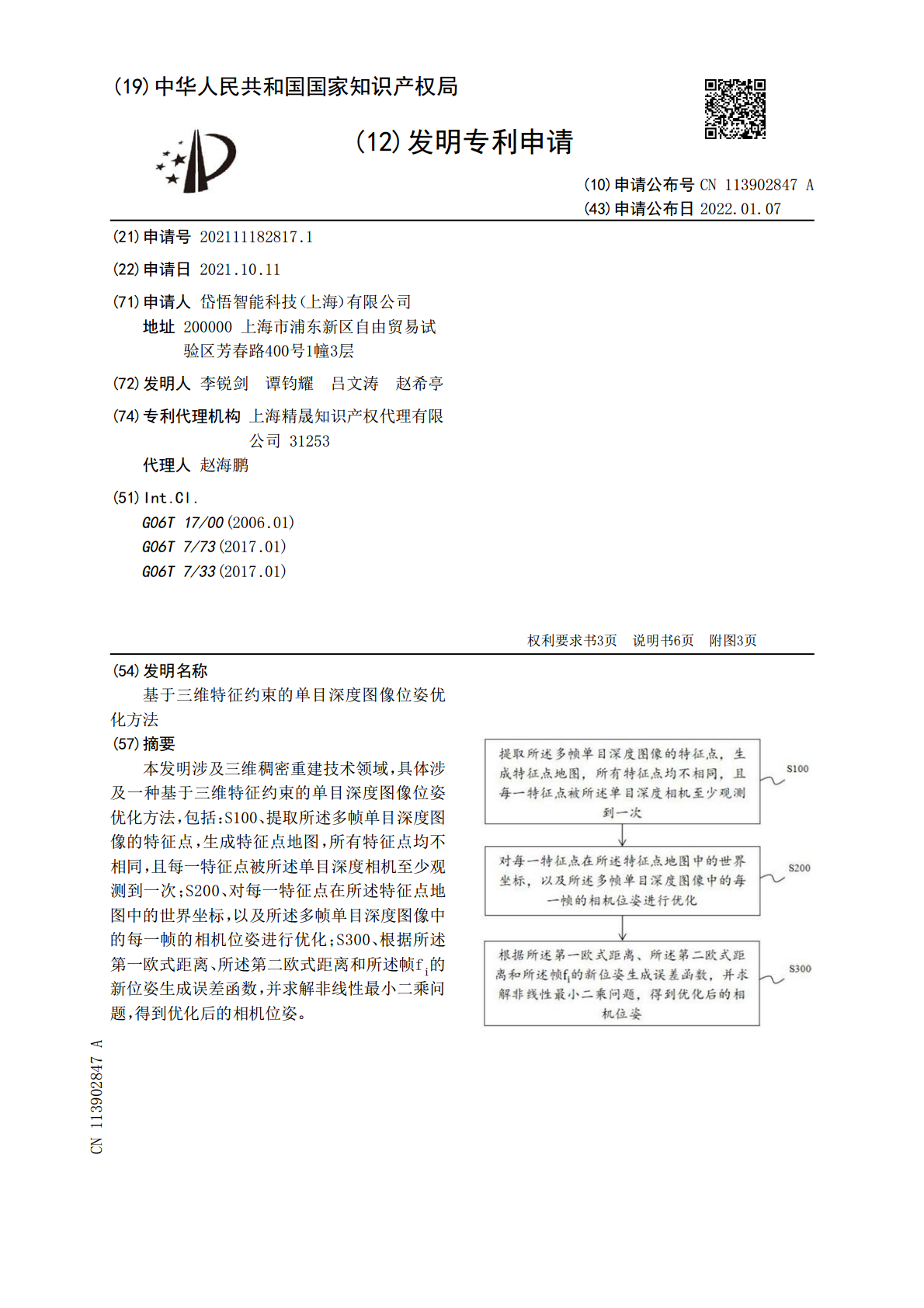
本发明涉及三维稠密重建技术领域,具体涉及一种基于三维特征约束的单目深度图像位姿优化方法,包括:S100、提取所述多帧单目深度图像的特征点,生成特征点地图,所有特征点均不相同,且每一特征点被所述单目深度相机至少观测到一次;S200、对每一特征点在所述特征点地图中的世界坐标,以及所述多帧单目深度图像中的每一帧的相机位姿进行优化;S300、根据所述第一欧式距离、所述第二欧式距离和所述帧f
基于单目图像生成三维对象模型的方法.pdf
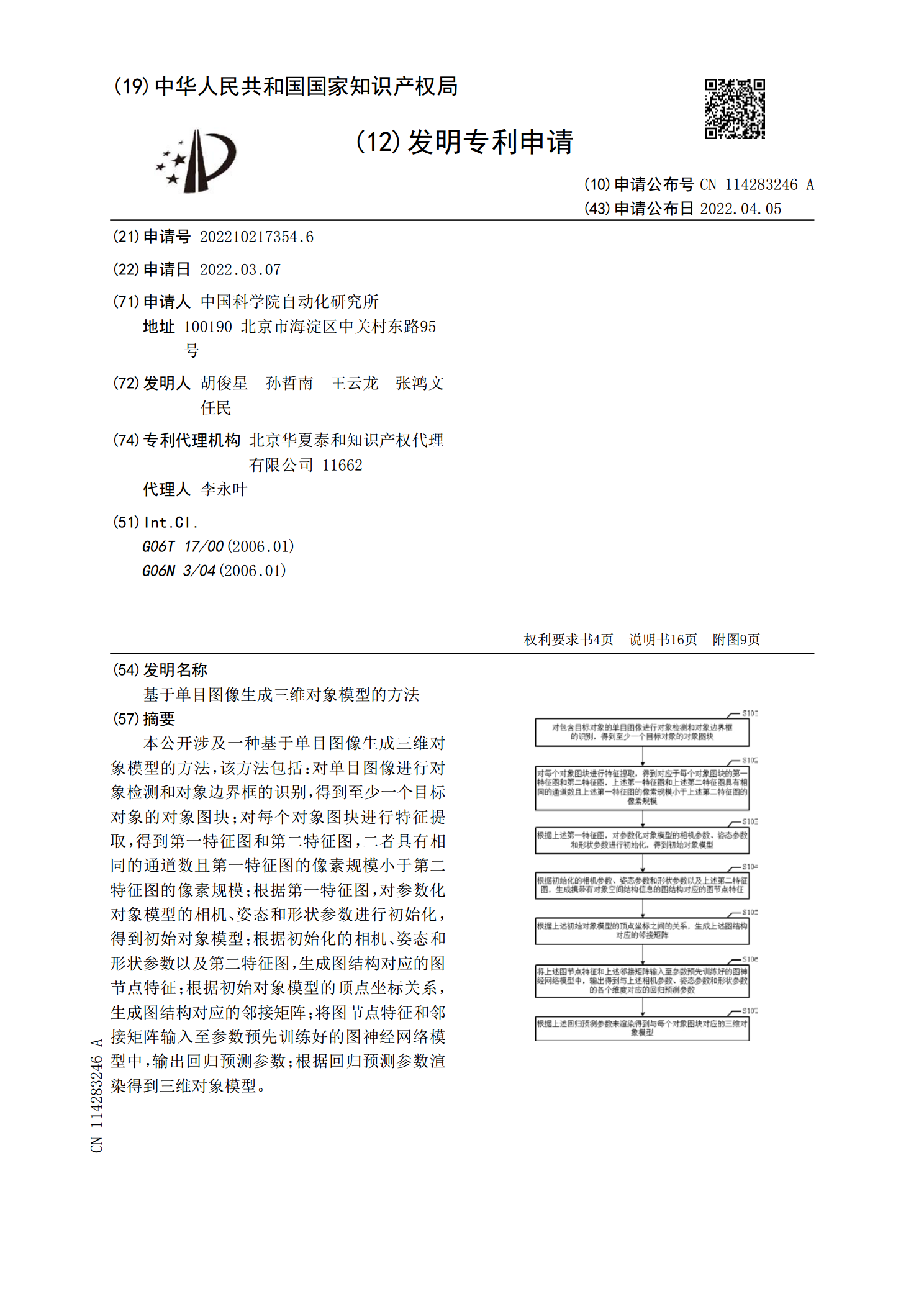
本公开涉及一种基于单目图像生成三维对象模型的方法,该方法包括:对单目图像进行对象检测和对象边界框的识别,得到至少一个目标对象的对象图块;对每个对象图块进行特征提取,得到第一特征图和第二特征图,二者具有相同的通道数且第一特征图的像素规模小于第二特征图的像素规模;根据第一特征图,对参数化对象模型的相机、姿态和形状参数进行初始化,得到初始对象模型;根据初始化的相机、姿态和形状参数以及第二特征图,生成图结构对应的图节点特征;根据初始对象模型的顶点坐标关系,生成图结构对应的邻接矩阵;将图节点特征和邻接矩阵输入至参数

基于深度学习的单视角三维物体识别及位姿估计方法研究的开题报告.docx
基于深度学习的单视角三维物体识别及位姿估计方法研究的开题报告开题报告一、题目基于深度学习的单视角三维物体识别及位姿估计方法研究二、选题背景在机器人视觉领域中,三维物体识别和位姿估计是一个十分关键的问题。在实际的场景中,机器人需要通过视觉传感器进行环境感知,并对周围的物体进行三维建模和位置识别,以此为基础可以实现自动化操作和高效的任务执行。而在目前的研究中,基于深度学习的三维物体识别和位姿估计技术已经成为主流。通过使用深度学习的方法,可以大大提高机器人识别物体的准确性和鲁棒性。然而,目前针对单视角的三维物体
基于深度学习的单目视觉里程计位姿优化与误差修正方法.pdf
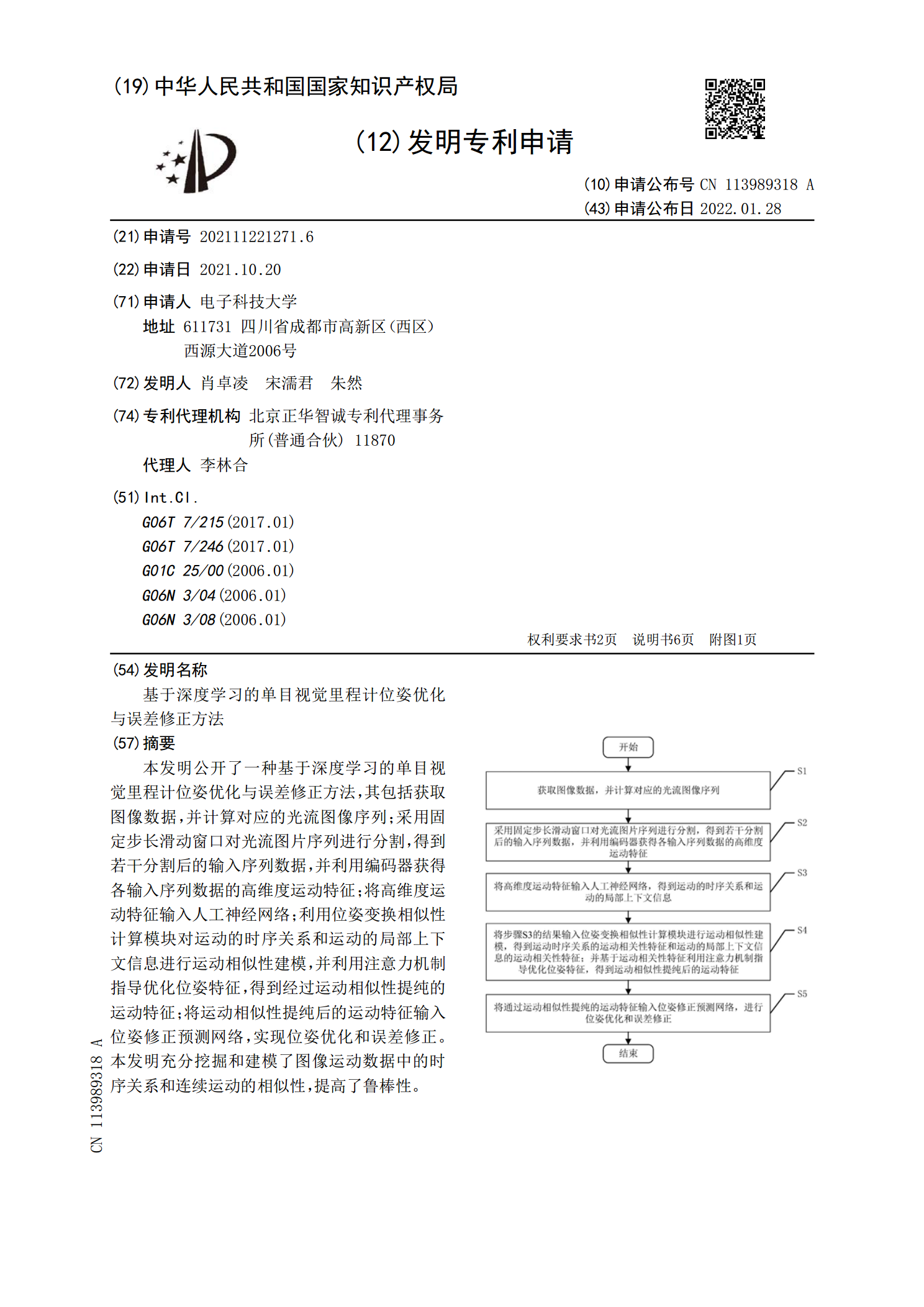
本发明公开了一种基于深度学习的单目视觉里程计位姿优化与误差修正方法,其包括获取图像数据,并计算对应的光流图像序列;采用固定步长滑动窗口对光流图片序列进行分割,得到若干分割后的输入序列数据,并利用编码器获得各输入序列数据的高维度运动特征;将高维度运动特征输入人工神经网络;利用位姿变换相似性计算模块对运动的时序关系和运动的局部上下文信息进行运动相似性建模,并利用注意力机制指导优化位姿特征,得到经过运动相似性提纯的运动特征;将运动相似性提纯后的运动特征输入位姿修正预测网络,实现位姿优化和误差修正。本发明充分挖掘
基于细粒度多特征融合的矿井图像无监督单目深度估计方法.pdf
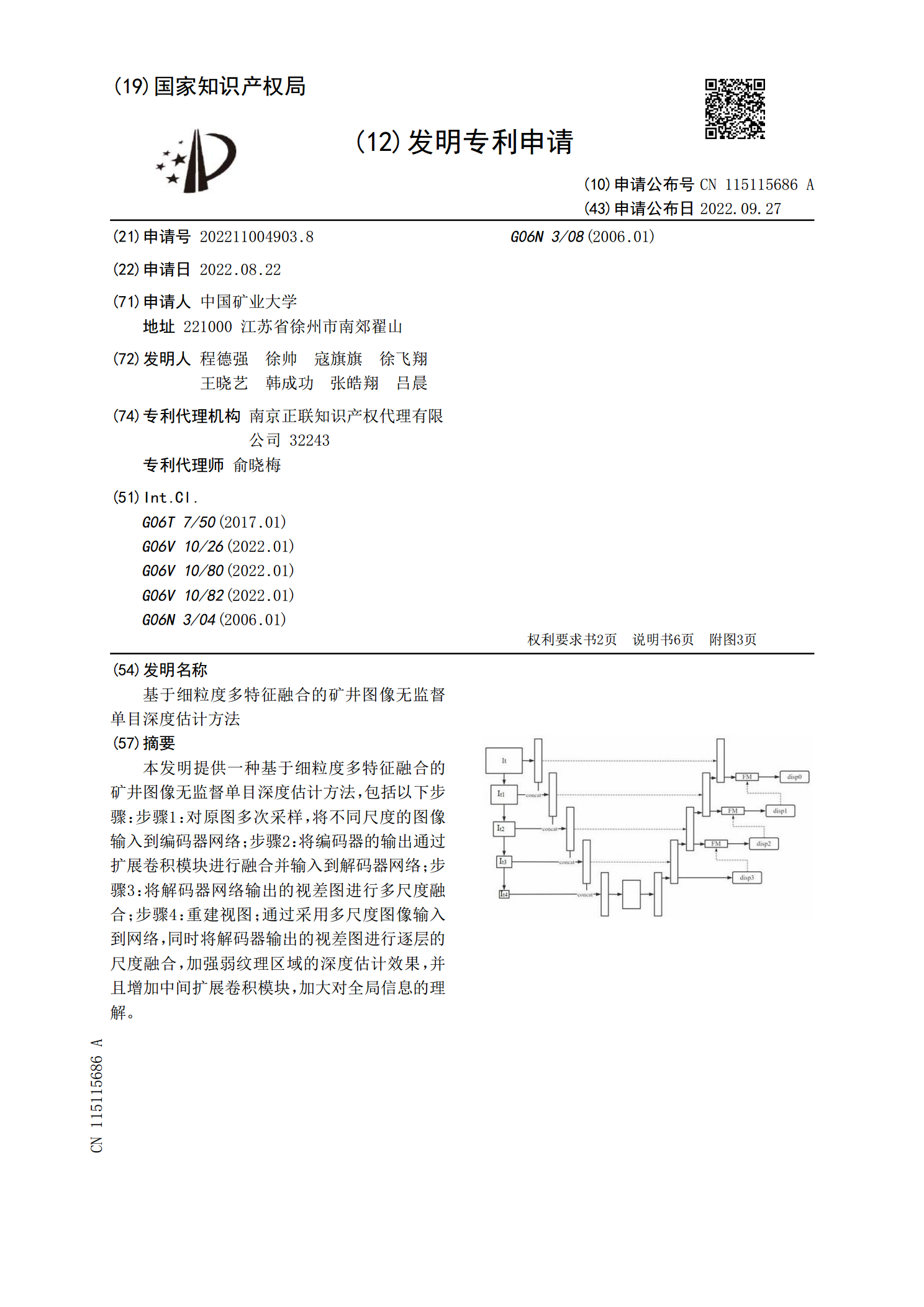
本发明提供一种基于细粒度多特征融合的矿井图像无监督单目深度估计方法,包括以下步骤:步骤1:对原图多次采样,将不同尺度的图像输入到编码器网络;步骤2:将编码器的输出通过扩展卷积模块进行融合并输入到解码器网络;步骤3:将解码器网络输出的视差图进行多尺度融合;步骤4:重建视图;通过采用多尺度图像输入到网络,同时将解码器输出的视差图进行逐层的尺度融合,加强弱纹理区域的深度估计效果,并且增加中间扩展卷积模块,加大对全局信息的理解。