
一种面向车路协同自动驾驶的关键路段辨识方法.pdf

慧颖****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向车路协同自动驾驶的关键路段辨识方法.pdf
本发明依据静态信息将道路划分成若干个特征路段,构建特征路段静态信息量函数,基于信息熵方法构建特征路段动态信息量计算模型,建立融合自动驾驶车流量、静态信息量、动态信息量的特征路段综合信息效益函数,基于特征路段综合信息效益计算结果,根据交通管理者的需求,确定一个判断特征路段是否为关键路段的阈值,若特征路段的综合信息效益值大于等于该阈值,则该为关键路段,因此该发明能够面向车路协同自动驾驶,为路侧车路协同设施设备的布局优化奠定基础,同时为交通管理者进行自动驾驶安全风险评价和管控策略制定提供依据。
自动驾驶与车路协同.pdf

自动驾驶与车路协同.pdf
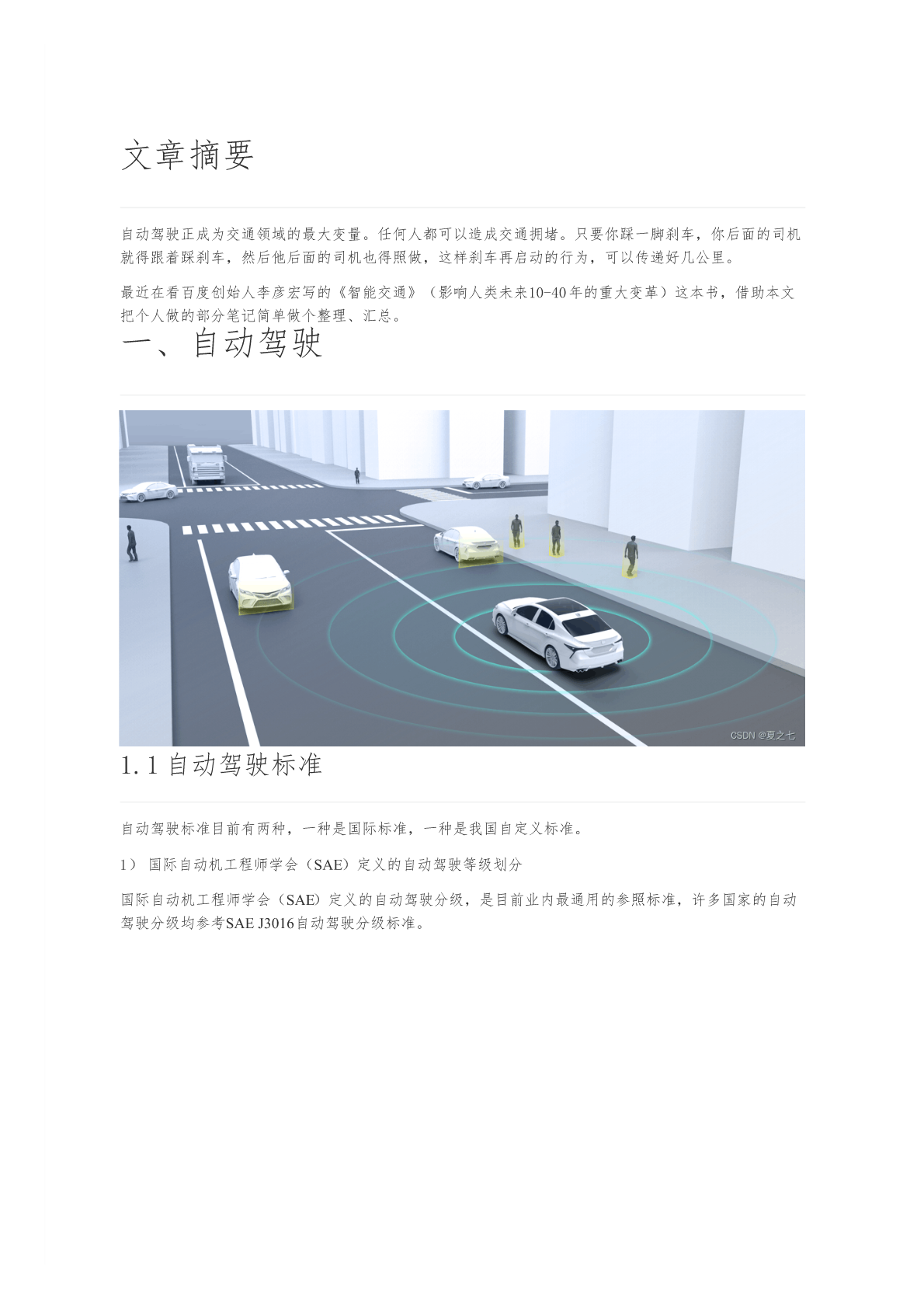
就得跟着踩刹车,然后他后面的司机也得照做,这样刹车再启动的行为,可以传递好几公里。最近在看百度创始人李彦宏写的《智能交通》(影响人类未来年的重大变革)这本书,借助本文把个人做的部分笔记简单做个整理、汇总。一、自动驾驶自动驾驶标准自动驾驶标准目前有两种,一种是国际标准,一种是我国自定义标准。1)国际自动机工程师学会(SAE)定义的自动驾驶等级划分国际自动机工程师学会(SAE)定义的自动驾驶分级,是目前业内最通用的参照标准,许多国家的自动驾驶分级均参考SAEJ3016自动驾驶分级标准。8月20日,由工业和信息
基于车路协同的自动驾驶控制方法及系统.pdf
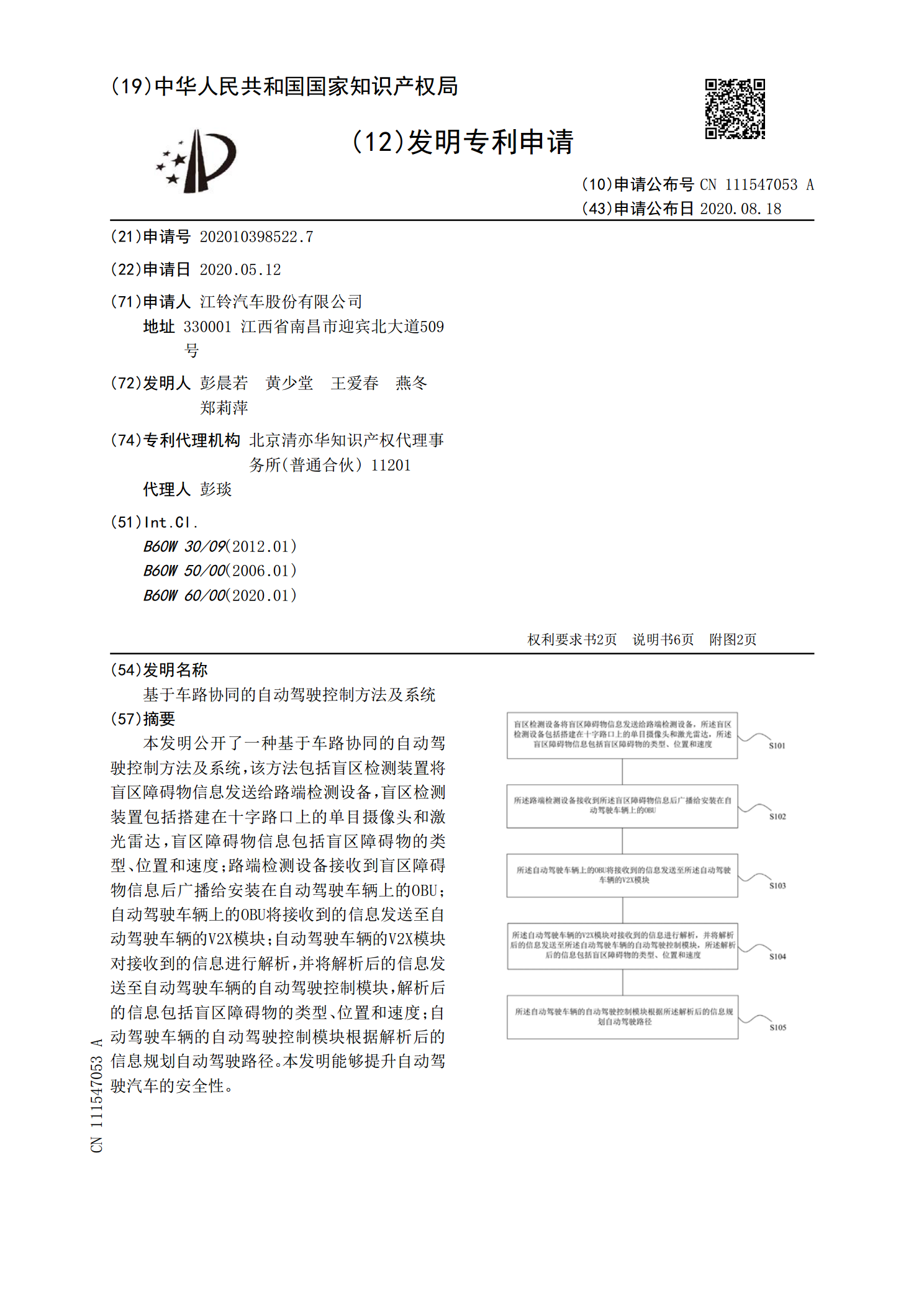
本发明公开了一种基于车路协同的自动驾驶控制方法及系统,该方法包括盲区检测装置将盲区障碍物信息发送给路端检测设备,盲区检测装置包括搭建在十字路口上的单目摄像头和激光雷达,盲区障碍物信息包括盲区障碍物的类型、位置和速度;路端检测设备接收到盲区障碍物信息后广播给安装在自动驾驶车辆上的OBU;自动驾驶车辆上的OBU将接收到的信息发送至自动驾驶车辆的V2X模块;自动驾驶车辆的V2X模块对接收到的信息进行解析,并将解析后的信息发送至自动驾驶车辆的自动驾驶控制模块,解析后的信息包括盲区障碍物的类型、位置和速度;自动驾驶
车路协同自动驾驶方法及高效运输系统.pdf
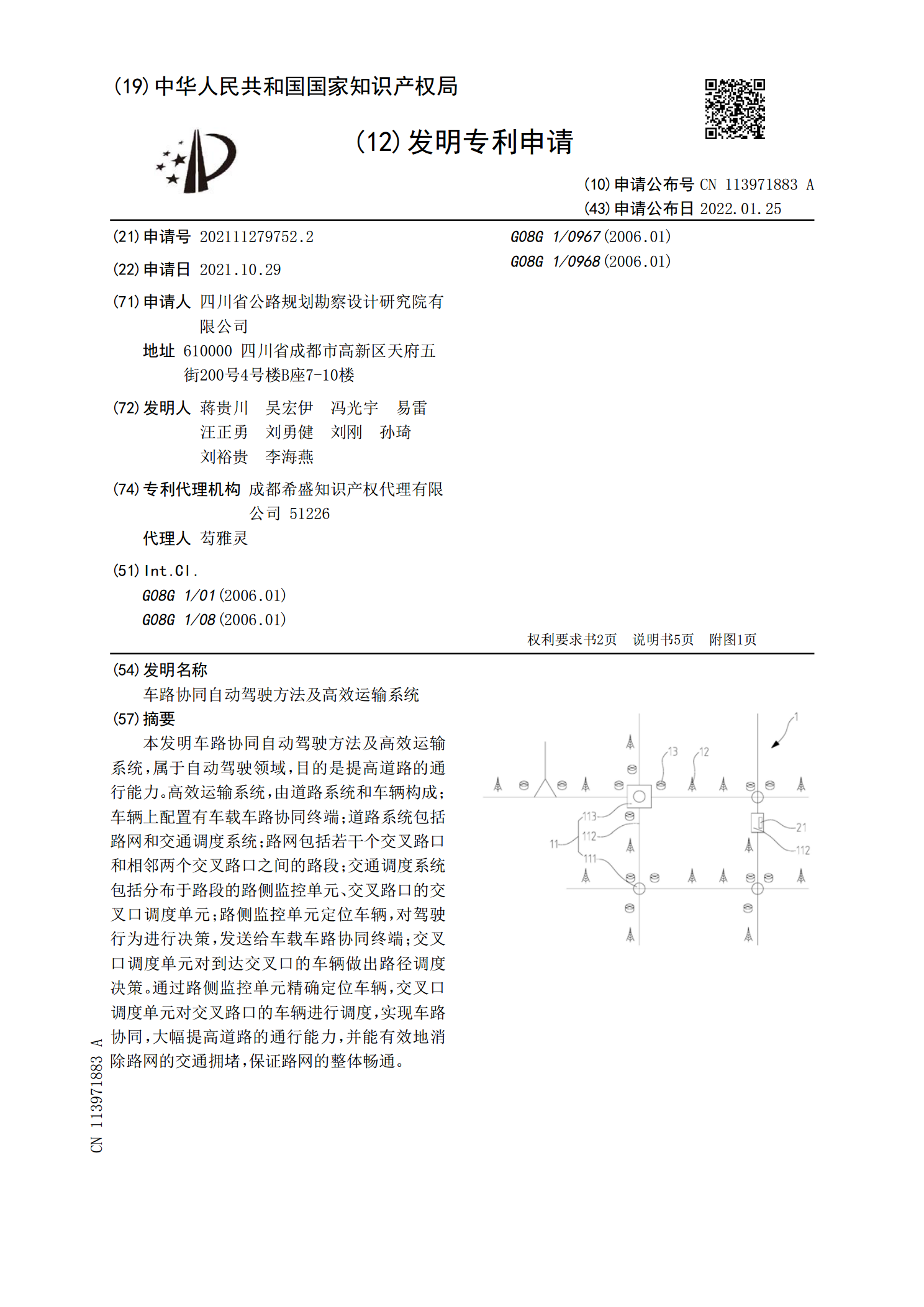
本发明车路协同自动驾驶方法及高效运输系统,属于自动驾驶领域,目的是提高道路的通行能力。高效运输系统,由道路系统和车辆构成;车辆上配置有车载车路协同终端;道路系统包括路网和交通调度系统;路网包括若干个交叉路口和相邻两个交叉路口之间的路段;交通调度系统包括分布于路段的路侧监控单元、交叉路口的交叉口调度单元;路侧监控单元定位车辆,对驾驶行为进行决策,发送给车载车路协同终端;交叉口调度单元对到达交叉口的车辆做出路径调度决策。通过路侧监控单元精确定位车辆,交叉口调度单元对交叉路口的车辆进行调度,实现车路协同,大幅提