
智能汽车毫米波雷达网络拓扑架构.pdf

书生****ma


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能汽车毫米波雷达网络拓扑架构.pdf
本发明公开了一种智能汽车毫米波雷达网络拓扑架构,其包括:前向毫米波雷达、左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达和智能驾驶控制器,左前毫米波雷达通过第一雷达内部CAN通讯网络与右前毫米波雷达通讯连接,左后毫米波雷达通过第二雷达内部CAN通讯网络与右后毫米波雷达通讯连接,前向毫米波雷达、右前毫米波雷达和左后毫米波雷达与智能驾驶控制器通讯连接。本发明的智能汽车毫米波雷达网络拓扑架构,实现角雷达主从式组网,左右角雷达之间先做融合,然后将融合结果发送到智能驾驶控制器进行决策,保证横穿目标的I
一种智能汽车毫米波雷达网络拓扑方法.pdf
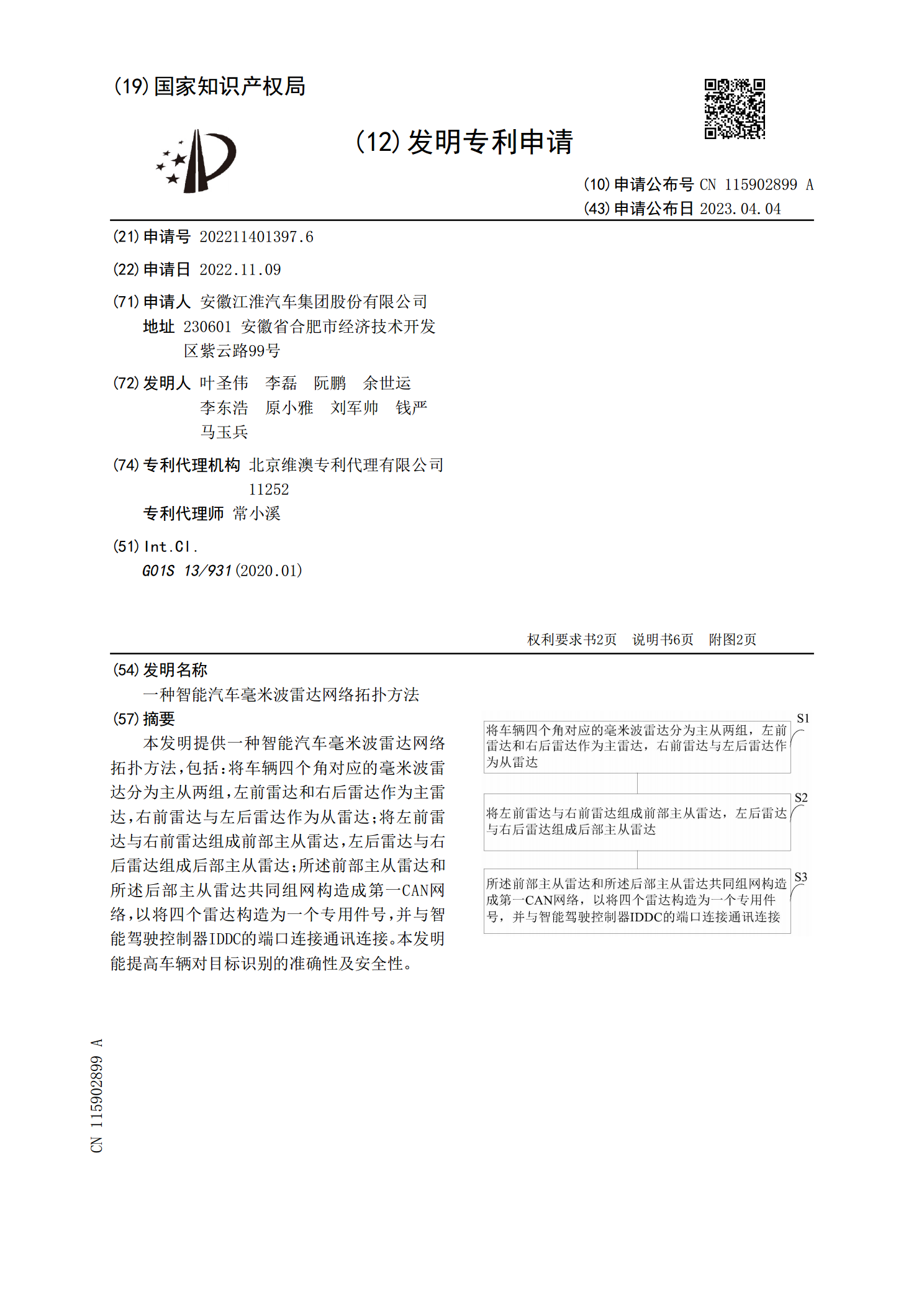
本发明提供一种智能汽车毫米波雷达网络拓扑方法,包括:将车辆四个角对应的毫米波雷达分为主从两组,左前雷达和右后雷达作为主雷达,右前雷达与左后雷达作为从雷达;将左前雷达与右前雷达组成前部主从雷达,左后雷达与右后雷达组成后部主从雷达;所述前部主从雷达和所述后部主从雷达共同组网构造成第一CAN网络,以将四个雷达构造为一个专用件号,并与智能驾驶控制器IDDC的端口连接通讯连接。本发明能提高车辆对目标识别的准确性及安全性。

基于混合网络拓扑架构的船舶智能集成平台网络架构研究.docx
基于混合网络拓扑架构的船舶智能集成平台网络架构研究随着数字化和智能化技术的不断进步,船舶行业也在逐步向智能化方向发展。为了更好地实现船舶的智能化管控,需要建立一个合理、高效、可靠的网络架构。本文将研究基于混合网络拓扑架构的船舶智能集成平台网络架构。一、船舶智能集成平台的概念船舶智能集成平台,是一种基于数字化、智能化及物联网技术的集成化管控系统,主要用于船舶的监控、控制和管理。通过传感器、通信模块、云计算等技术手段,将船上各种数据汇总、处理和分析,实现对船体状态、航线安全、人员管理等各个方面的全面监管。二、

智能网联汽车网络架构方案研究.docx
智能网联汽车网络架构方案研究智能网联汽车网络架构方案研究摘要:随着信息技术的飞速发展,智能网联汽车已逐渐成为汽车产业的发展方向。智能网联汽车的实现离不开高效稳定的网络架构。本文重点研究了智能网联汽车的网络架构方案,包括车内通信、车辆间通信和车辆与基础设施的通信。基于该研究,提出了一个综合的智能网联汽车网络架构方案,用于指导智能网联汽车的发展。1.引言智能网联汽车是指通过高速网络连接和先进的通信技术将汽车与互联网和其他车辆、基础设施相连接。智能网联汽车的出现,给人们的交通出行带来了全新的体验,提供了更安全、

一种智能汽车车辆在环毫米波雷达测试台架.pdf
本发明公开了一种智能汽车车辆在环毫米波雷达测试台架,包括有底座、多自由度升降平台、毫米波吸波暗箱、电动滑轨车、收发变频器和PXI数据处理器,其中多自由度升降平台通过滑轨连接在底座上面的支撑架的滑道上,多自由度升降平台能够在支撑架的滑道上进行上下移动,多自由度升降平台由下部的电动推杆带动进行滑动,毫米波吸波暗箱装配在多自由度升降平台的前部,电动滑轨车装配在多自由度升降平台后部的弧形滑道上,收发变频器设在电动滑轨车的顶部,PXI数据处理器装配在底座上,电动推杆、电动滑轨车和收发变频器均与PXI数据处理器相连接