
一种智能汽车毫米波雷达网络拓扑方法.pdf

是你****松呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能汽车毫米波雷达网络拓扑方法.pdf
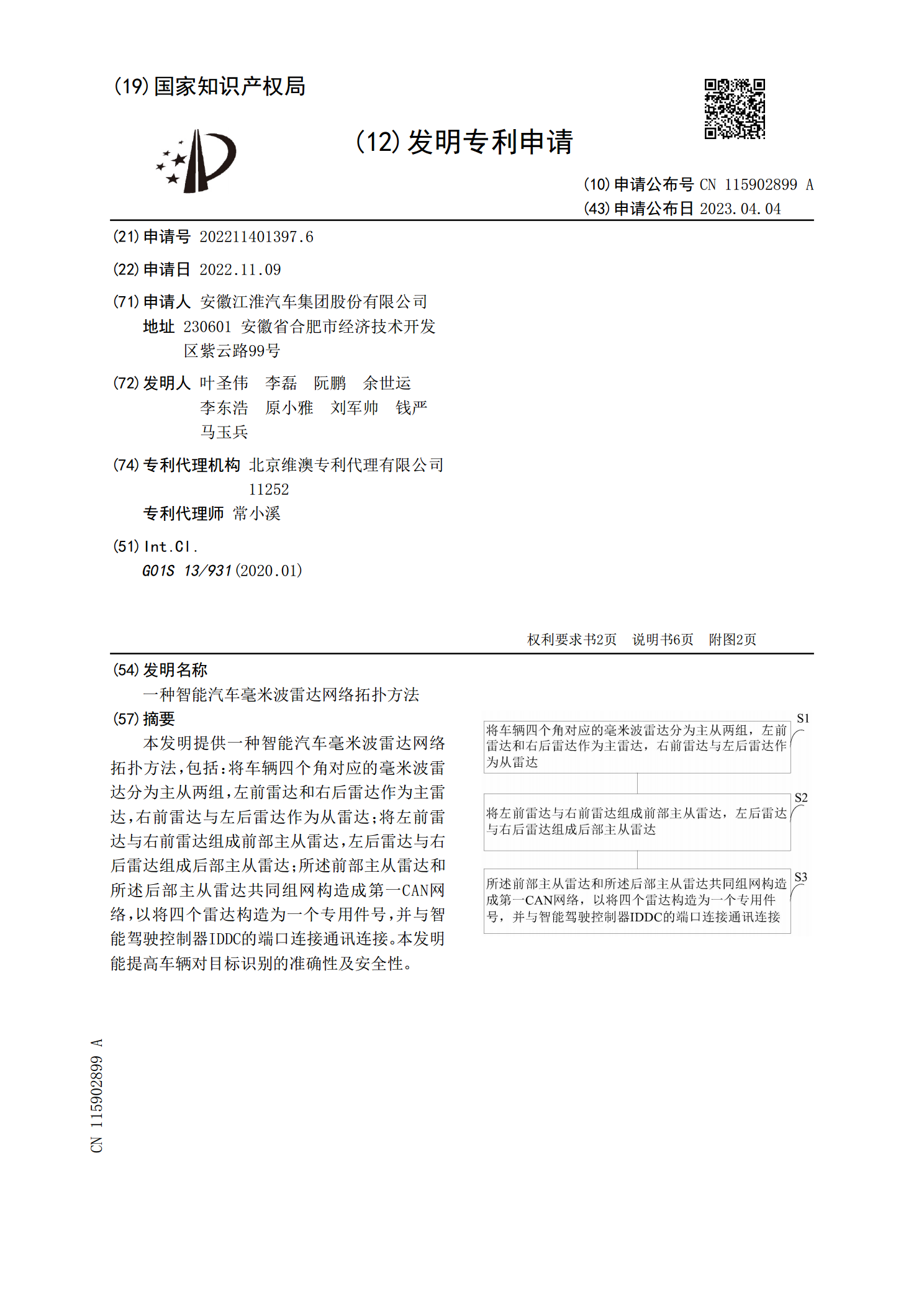
本发明提供一种智能汽车毫米波雷达网络拓扑方法,包括:将车辆四个角对应的毫米波雷达分为主从两组,左前雷达和右后雷达作为主雷达,右前雷达与左后雷达作为从雷达;将左前雷达与右前雷达组成前部主从雷达,左后雷达与右后雷达组成后部主从雷达;所述前部主从雷达和所述后部主从雷达共同组网构造成第一CAN网络,以将四个雷达构造为一个专用件号,并与智能驾驶控制器IDDC的端口连接通讯连接。本发明能提高车辆对目标识别的准确性及安全性。

智能汽车毫米波雷达网络拓扑架构.pdf
本发明公开了一种智能汽车毫米波雷达网络拓扑架构,其包括:前向毫米波雷达、左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达和智能驾驶控制器,左前毫米波雷达通过第一雷达内部CAN通讯网络与右前毫米波雷达通讯连接,左后毫米波雷达通过第二雷达内部CAN通讯网络与右后毫米波雷达通讯连接,前向毫米波雷达、右前毫米波雷达和左后毫米波雷达与智能驾驶控制器通讯连接。本发明的智能汽车毫米波雷达网络拓扑架构,实现角雷达主从式组网,左右角雷达之间先做融合,然后将融合结果发送到智能驾驶控制器进行决策,保证横穿目标的I

一种智能汽车车辆在环毫米波雷达测试台架.pdf
本发明公开了一种智能汽车车辆在环毫米波雷达测试台架,包括有底座、多自由度升降平台、毫米波吸波暗箱、电动滑轨车、收发变频器和PXI数据处理器,其中多自由度升降平台通过滑轨连接在底座上面的支撑架的滑道上,多自由度升降平台能够在支撑架的滑道上进行上下移动,多自由度升降平台由下部的电动推杆带动进行滑动,毫米波吸波暗箱装配在多自由度升降平台的前部,电动滑轨车装配在多自由度升降平台后部的弧形滑道上,收发变频器设在电动滑轨车的顶部,PXI数据处理器装配在底座上,电动推杆、电动滑轨车和收发变频器均与PXI数据处理器相连接

一种汽车毫米波雷达点迹凝聚方法及系统.pdf
本发明提供一种汽车毫米波雷达点迹凝聚方法及系统,对当前帧点迹数据进行凝聚时,优先根据上一帧航迹信息反馈的目标位置预测值、多普勒速度、目标长宽信息进行航迹与点迹关联聚类,然后再对剩余点迹进行点迹级凝聚处理,从而避免大目标分裂与临近目标合并问题难以兼并处理的痛点,有效解决汽车毫米波雷达大目标分裂问题。且本发明在航迹与点迹关联聚类过程中,利用目标识别结果对聚类之后得到的长宽信息进行修正,确保输出更为可靠的目标尺寸特征信息。
毫米波雷达预警系统、方法及汽车.pdf
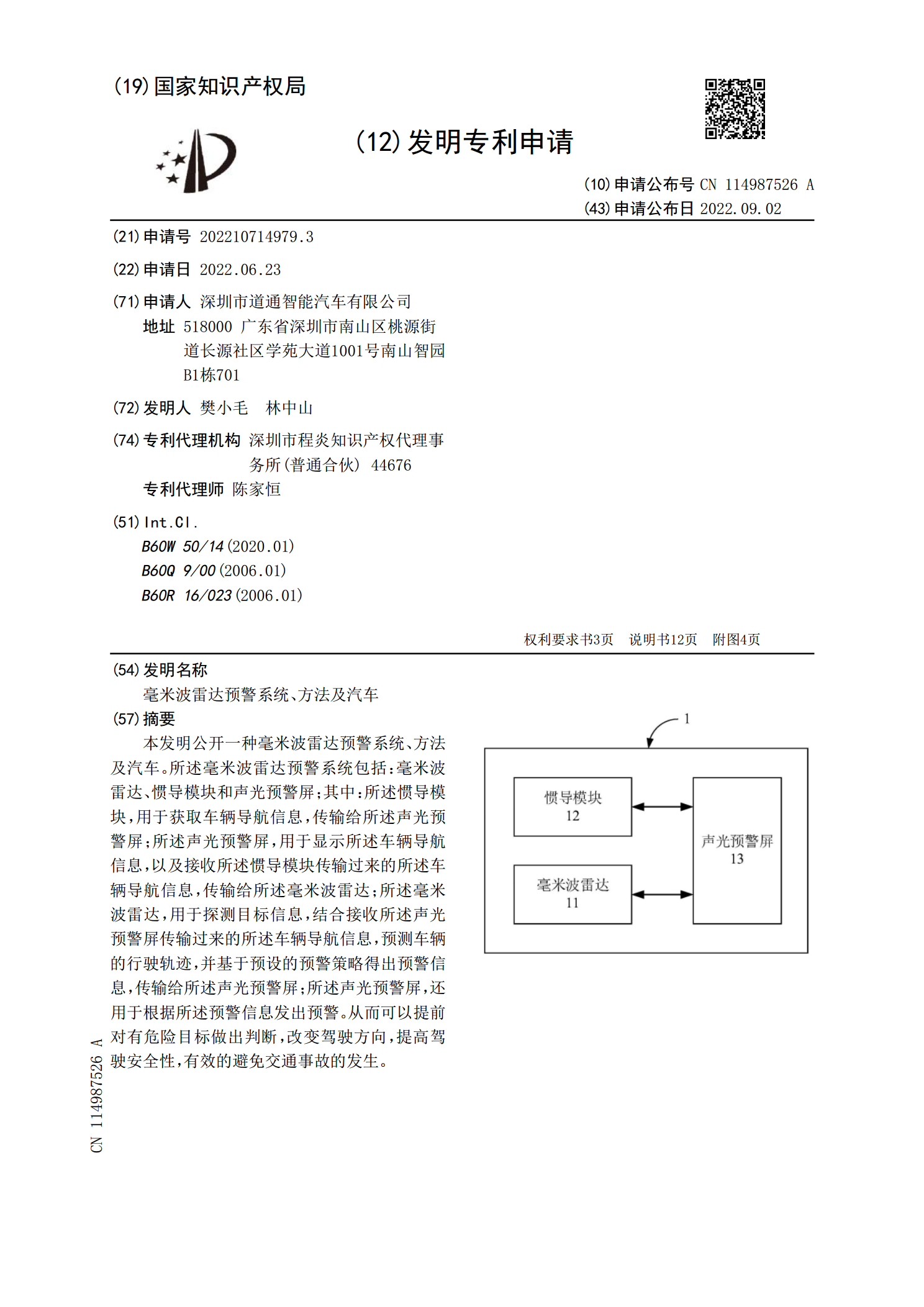
本发明公开一种毫米波雷达预警系统、方法及汽车。所述毫米波雷达预警系统包括:毫米波雷达、惯导模块和声光预警屏;其中:所述惯导模块,用于获取车辆导航信息,传输给所述声光预警屏;所述声光预警屏,用于显示所述车辆导航信息,以及接收所述惯导模块传输过来的所述车辆导航信息,传输给所述毫米波雷达;所述毫米波雷达,用于探测目标信息,结合接收所述声光预警屏传输过来的所述车辆导航信息,预测车辆的行驶轨迹,并基于预设的预警策略得出预警信息,传输给所述声光预警屏;所述声光预警屏,还用于根据所述预警信息发出预警。从而可以提前对有危