
一种基于感知数据的无人船航行状态控制方法.pdf

邻家****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于感知数据的无人船航行状态控制方法.pdf
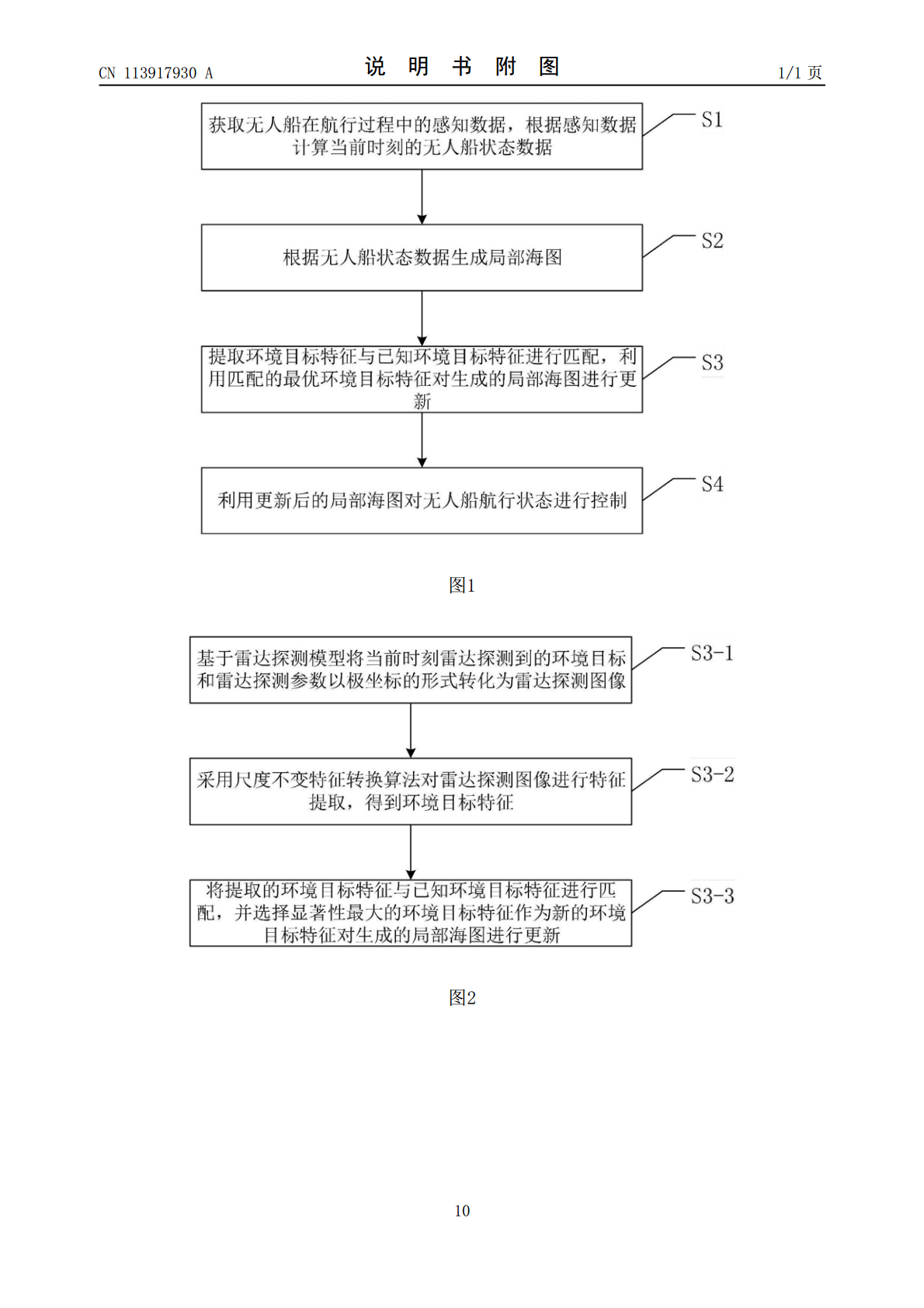
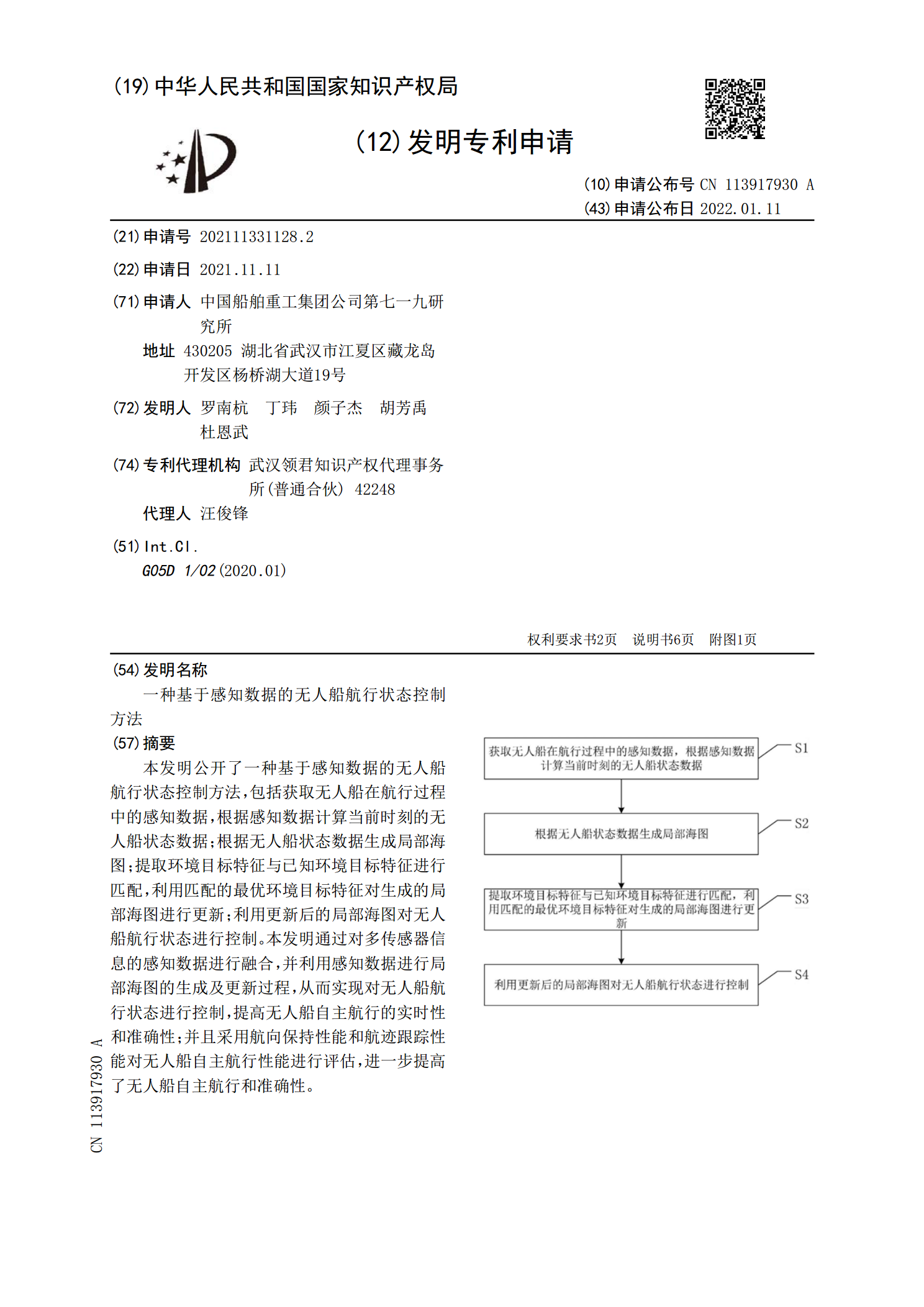
本发明公开了一种基于感知数据的无人船航行状态控制方法,包括获取无人船在航行过程中的感知数据,根据感知数据计算当前时刻的无人船状态数据;根据无人船状态数据生成局部海图;提取环境目标特征与已知环境目标特征进行匹配,利用匹配的最优环境目标特征对生成的局部海图进行更新;利用更新后的局部海图对无人船航行状态进行控制。本发明通过对多传感器信息的感知数据进行融合,并利用感知数据进行局部海图的生成及更新过程,从而实现对无人船航行状态进行控制,提高无人船自主航行的实时性和准确性;并且采用航向保持性能和航迹跟踪性能对无人船自
无人船测绘航行系统及其控制方法.pdf
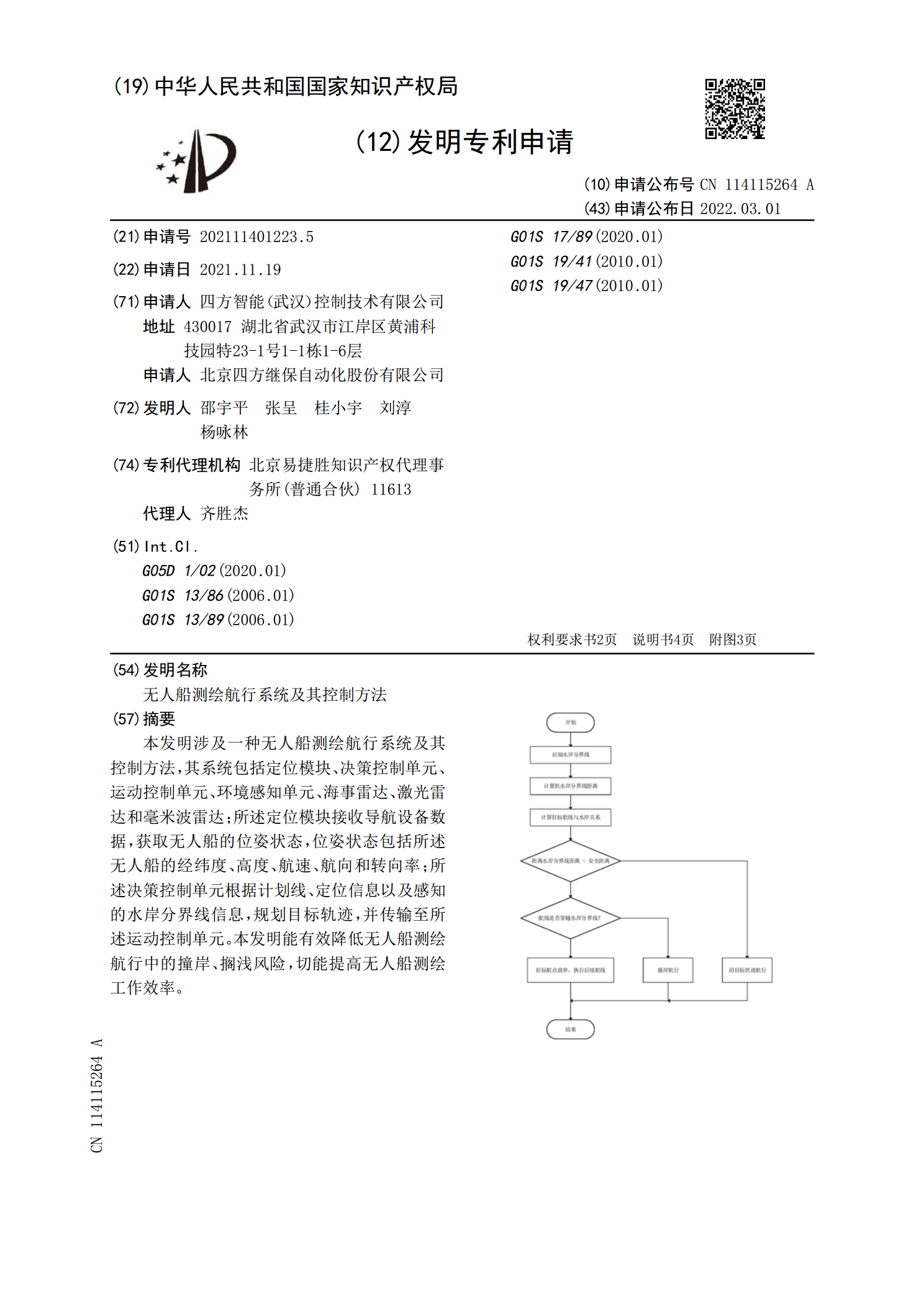
本发明涉及一种无人船测绘航行系统及其控制方法,其系统包括定位模块、决策控制单元、运动控制单元、环境感知单元、海事雷达、激光雷达和毫米波雷达;所述定位模块接收导航设备数据,获取无人船的位姿状态,位姿状态包括所述无人船的经纬度、高度、航速、航向和转向率;所述决策控制单元根据计划线、定位信息以及感知的水岸分界线信息,规划目标轨迹,并传输至所述运动控制单元。本发明能有效降低无人船测绘航行中的撞岸、搁浅风险,切能提高无人船测绘工作效率。
一种基于多雷达感知的无人船避障方法.pdf
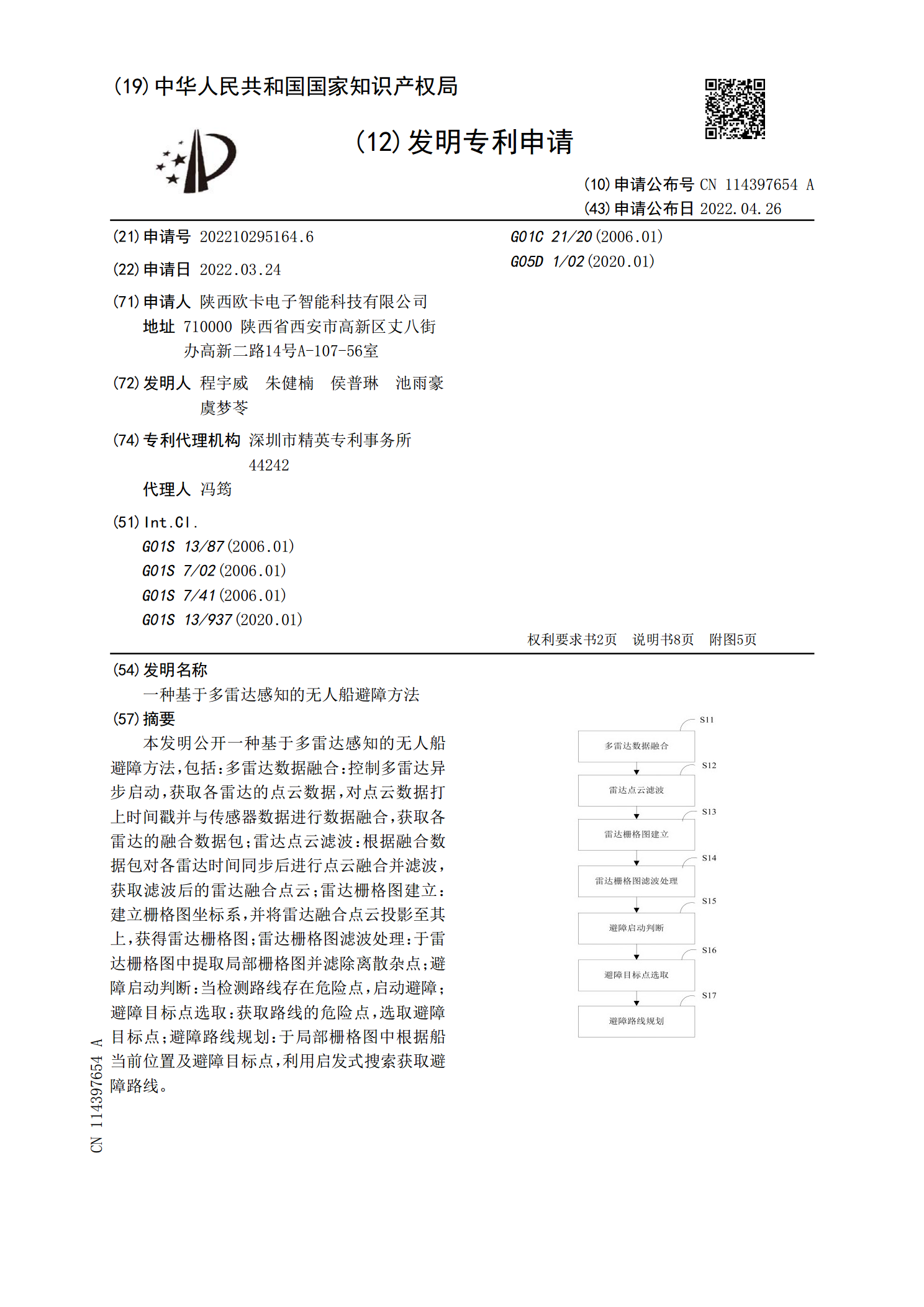
本发明公开一种基于多雷达感知的无人船避障方法,包括:多雷达数据融合:控制多雷达异步启动,获取各雷达的点云数据,对点云数据打上时间戳并与传感器数据进行数据融合,获取各雷达的融合数据包;雷达点云滤波:根据融合数据包对各雷达时间同步后进行点云融合并滤波,获取滤波后的雷达融合点云;雷达栅格图建立:建立栅格图坐标系,并将雷达融合点云投影至其上,获得雷达栅格图;雷达栅格图滤波处理:于雷达栅格图中提取局部栅格图并滤除离散杂点;避障启动判断:当检测路线存在危险点,启动避障;避障目标点选取:获取路线的危险点,选取避障目标点
一种无人船自主航行系统及其方法.pdf
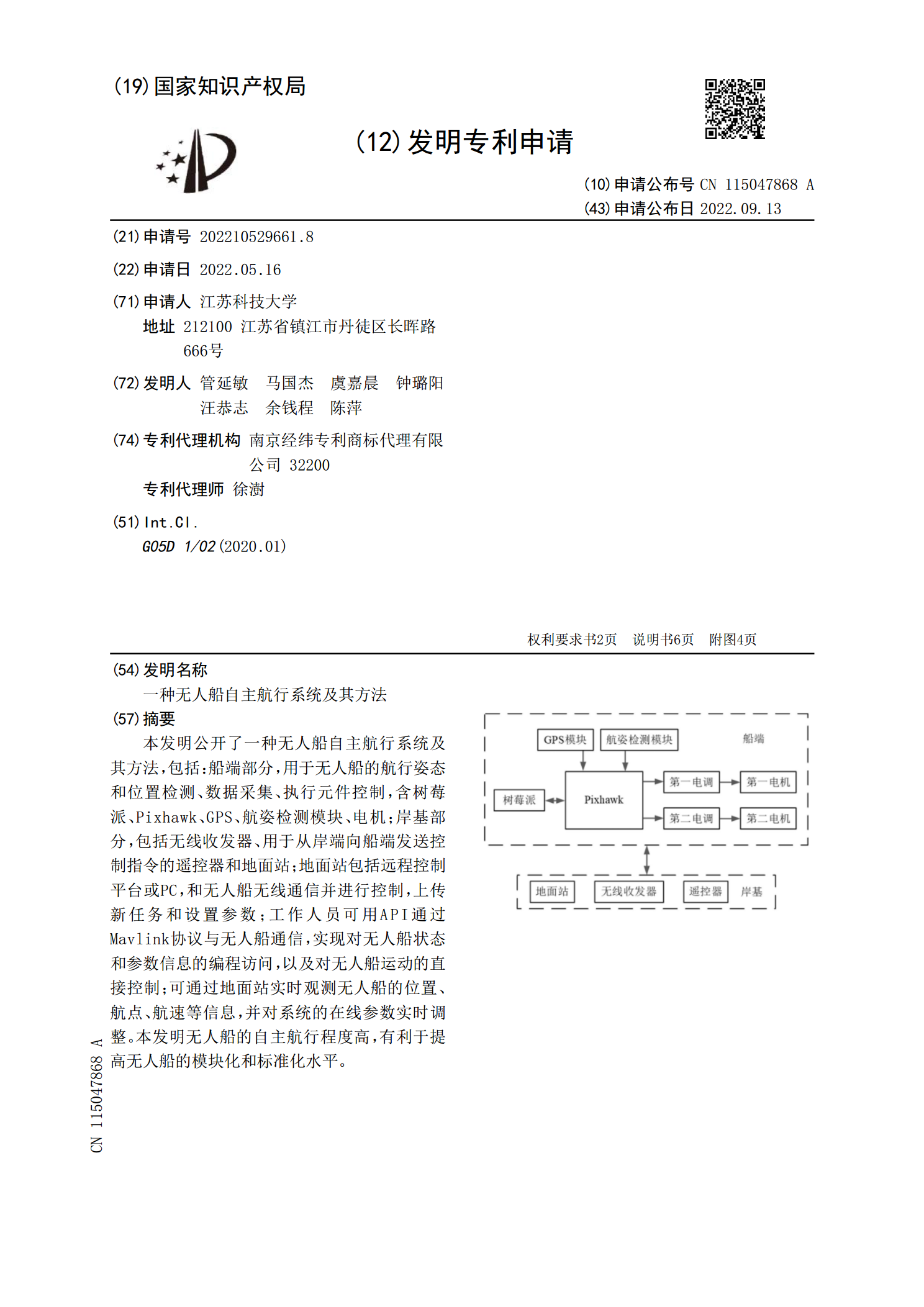
本发明公开了一种无人船自主航行系统及其方法,包括:船端部分,用于无人船的航行姿态和位置检测、数据采集、执行元件控制,含树莓派、Pixhawk、GPS、航姿检测模块、电机;岸基部分,包括无线收发器、用于从岸端向船端发送控制指令的遥控器和地面站;地面站包括远程控制平台或PC,和无人船无线通信并进行控制,上传新任务和设置参数;工作人员可用API通过Mavlink协议与无人船通信,实现对无人船状态和参数信息的编程访问,以及对无人船运动的直接控制;可通过地面站实时观测无人船的位置、航点、航速等信息,并对系统的在线参

一种基于感知信息的无人航行器目标定方位等距跟踪方法.pdf
本发明涉及目标跟踪领域,具体说是一种基于感知信息的无人航行器目标定方位等距跟踪方法,包括以下步骤:1)航行器获取目标的感知信息和航行器的航行器信息;2)对感知信息进行数据处理,获取经滤波平滑处理后的感知信息;3)设定目标相对于航行器的方位,设定距离数值D,建立虚拟目标运动坐标系,通过坐标系变化矩阵,得到航行器在虚拟目标运动坐标系下的位置;4)航行器通过速度调节策略对期望速度进行调节;5)根据目标航向,航行器解算航行器的期望航向;6)将期望速度和期望航向输出形成闭环,重复步骤1)~5)。本发明安全稳定,可靠