
车辆控制方法、装置和电子设备.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆控制的方法、装置、电子设备和车辆.pdf
本公开涉及一种车辆控制的方法、装置、电子设备和车辆,涉及车辆控制领域,该方法包括:获取车辆所处的环境参数和车辆的发动机参数;根据环境参数和发动机参数,确定车辆的冷却装置的第一目标控制参数;按照第一目标控制参数控制冷却装置运行。这样,在发动机水温和变速器油温达到预设阈值之前,若车辆行驶环境或者行驶工况发生变化,则可以根据不同的环境参数和发动机参数,及时和准确的控制冷却装置按照目标控制参数运行。避免了由于在行车过程中对冷却装置控制参数调整不及时而造成车辆各个部件温度过高进而导致的安全问题,确保了车辆的行车安全

车辆控制方法、装置和电子设备.pdf
本发明提供一种车辆控制方法、装置和电子设备,该方法先获取环境感知数据和自动驾驶车辆的当前行驶数据,然后根据环境感知数据和当前行驶数据,确定端到端控制机制的感知定位阶段、跟踪预测阶段、决策阶段、以及控制阶段中各阶段的目标时延,最后根据各阶段的目标时延和时延阈值,从各阶段的简单处理机制和复杂处理机制中确定目标处理机制,并控制自动驾驶车辆的自动驾驶系统在各阶段基于对应的目标处理机制工作。本发明使得各阶段的时延均可得到严格控制,不会挤占控制阶段的时间容量,因此既可以实现对全阶段的时延控制,又避免了控制阶段时间容量

车辆横向控制方法、装置和电子设备.pdf
本发明提供了一种车辆横向控制方法、装置和电子设备,方法包括:建立车辆的运动学方程,由运动学方程确定车辆的状态方程;结合给定的参考路径,确定车辆在给定一系列参考时刻的状态方程;根据给定一系列参考时刻的状态方程确定初始LQR控制器;建立状态空间方程,状态空间方程具有至少两个状态变量,其中一个状态变量用于反映车辆的系统噪声,其余状态变量用于反映外部干扰;根据状态空间方程确定扩张状态观测器;结合初始LQR控制器和扩张状态观测器,生成具有扩张状态观测器的目标LQR控制器,将目标LQR控制器用于车辆控制。本发明具有较

车辆制动的控制方法、装置、介质、电子设备和车辆.pdf
本公开涉及一种车辆制动的控制方法、装置、介质、电子设备和车辆,该方法包括:获取车辆的运行状态参数,运行状态参数包括车辆发动机的状态信息、主驾驶安全带的状态信息以及主驾驶车门的状态信息;在变速器未切换至驻车挡位的情况下,若运行状态参数满足预设条件,则向变速器发送用于指示切换至驻车挡位的挡位切换信号,预设条件包括:发动机的状态信息表征发动机未熄火、主驾驶安全带的状态信息表征主驾驶安全带被打开以及主驾驶车门的状态信息表征主驾驶车门被开启;在发送挡位切换信号之后,若确定在预设时间内变速器未进入驻车挡位,则控制车辆
车辆控制方法、装置、存储介质、电子设备和车辆.pdf
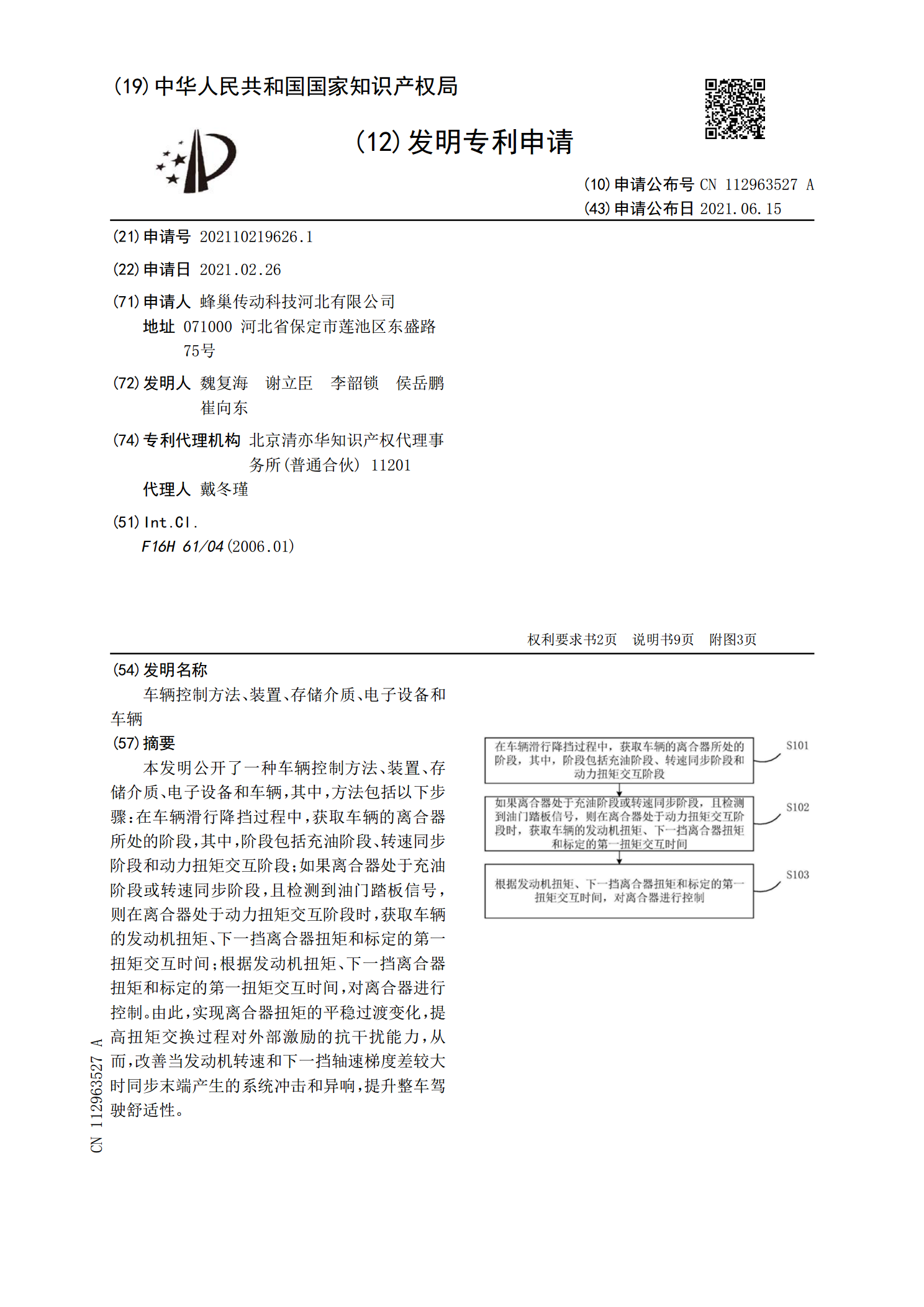
本发明公开了一种车辆控制方法、装置、存储介质、电子设备和车辆,其中,方法包括以下步骤:在车辆滑行降挡过程中,获取车辆的离合器所处的阶段,其中,阶段包括充油阶段、转速同步阶段和动力扭矩交互阶段;如果离合器处于充油阶段或转速同步阶段,且检测到油门踏板信号,则在离合器处于动力扭矩交互阶段时,获取车辆的发动机扭矩、下一挡离合器扭矩和标定的第一扭矩交互时间;根据发动机扭矩、下一挡离合器扭矩和标定的第一扭矩交互时间,对离合器进行控制。由此,实现离合器扭矩的平稳过渡变化,提高扭矩交换过程对外部激励的抗干扰能力,从而,改