
双指欠驱动抓手.pdf

一吃****昕靓

1/10
2/10
3/10
4/10
5/10
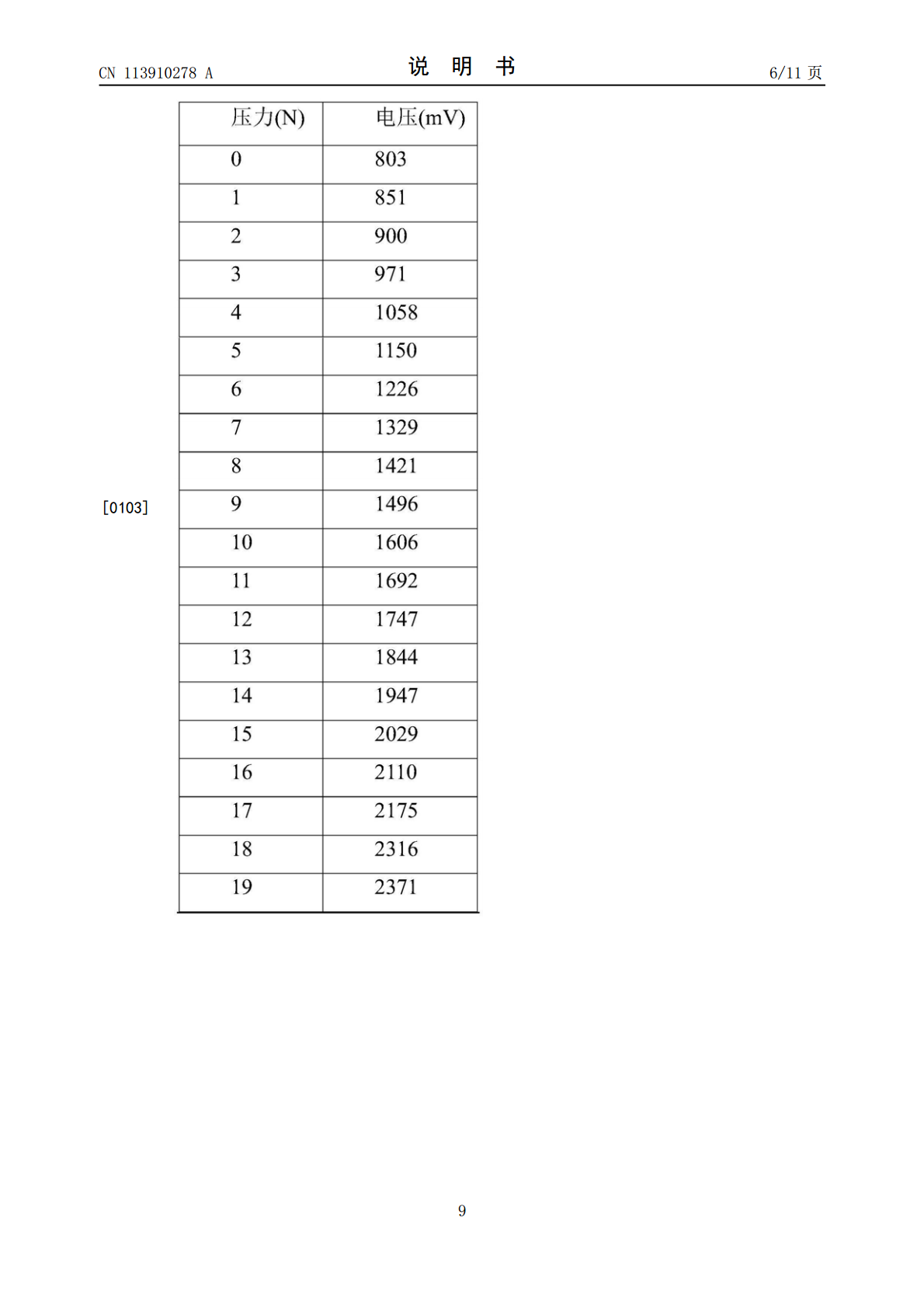
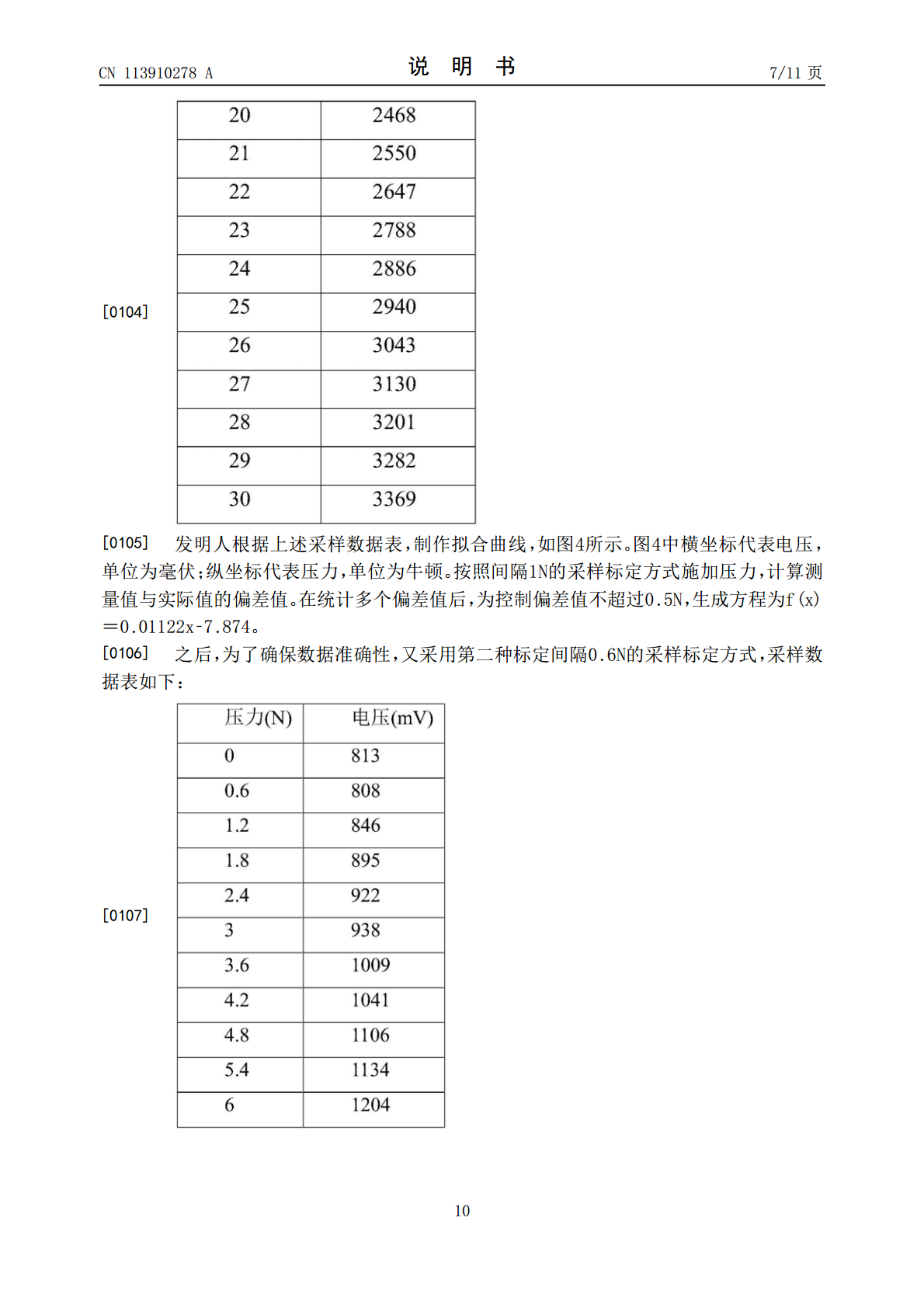
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双指欠驱动抓手.pdf
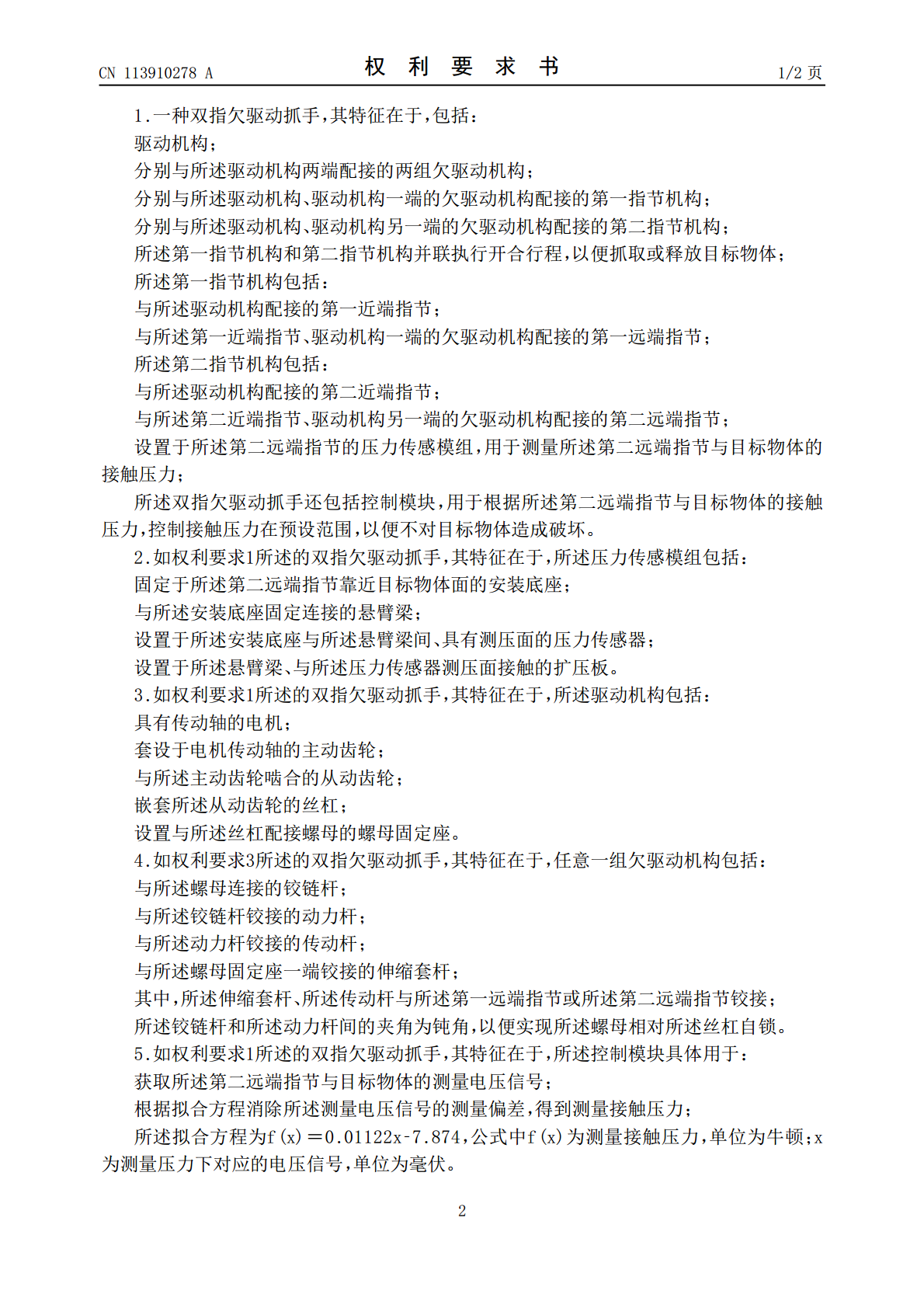
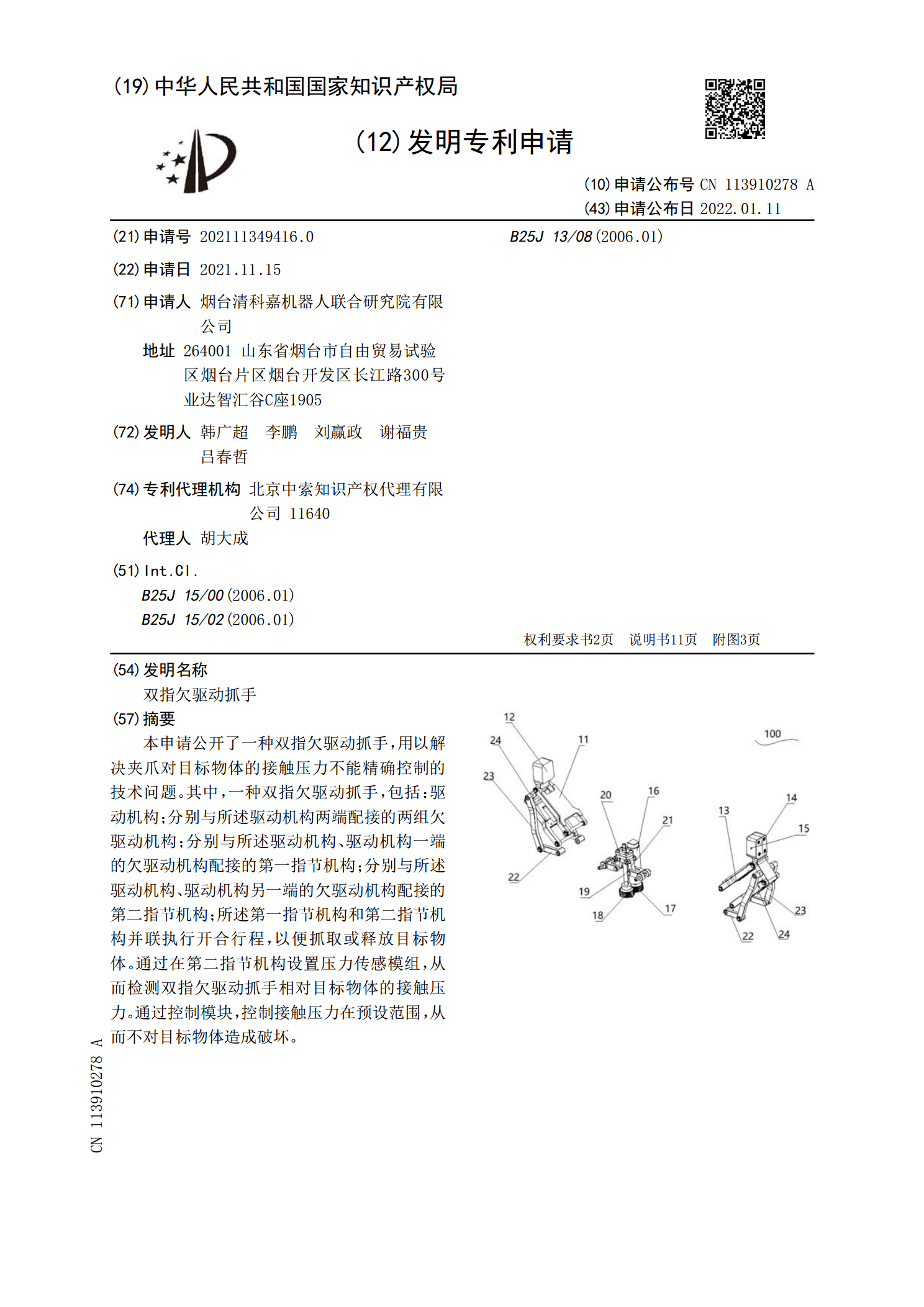
本申请公开了一种双指欠驱动抓手,用以解决夹爪对目标物体的接触压力不能精确控制的技术问题。其中,一种双指欠驱动抓手,包括:驱动机构;分别与所述驱动机构两端配接的两组欠驱动机构;分别与所述驱动机构、驱动机构一端的欠驱动机构配接的第一指节机构;分别与所述驱动机构、驱动机构另一端的欠驱动机构配接的第二指节机构;所述第一指节机构和第二指节机构并联执行开合行程,以便抓取或释放目标物体。通过在第二指节机构设置压力传感模组,从而检测双指欠驱动抓手相对目标物体的接触压力。通过控制模块,控制接触压力在预设范围,从而不对目标物
双指双驱动平移夹持型柔性抓手及控制方法.pdf
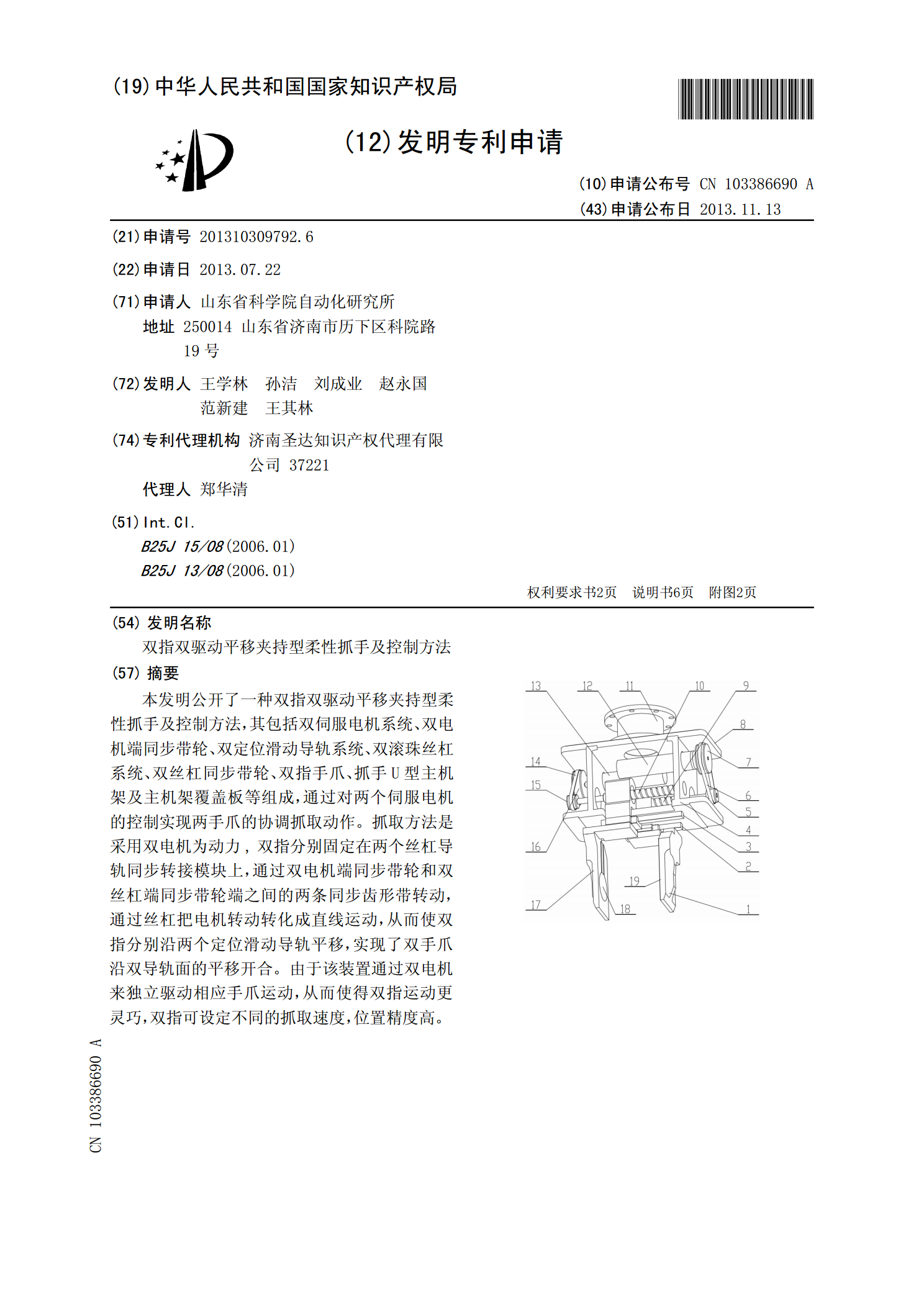
本发明公开了一种双指双驱动平移夹持型柔性抓手及控制方法,其包括双伺服电机系统、双电机端同步带轮、双定位滑动导轨系统、双滚珠丝杠系统、双丝杠同步带轮、双指手爪、抓手U型主机架及主机架覆盖板等组成,通过对两个伺服电机的控制实现两手爪的协调抓取动作。抓取方法是采用双电机为动力,双指分别固定在两个丝杠导轨同步转接模块上,通过双电机端同步带轮和双丝杠端同步带轮端之间的两条同步齿形带转动,通过丝杠把电机转动转化成直线运动,从而使双指分别沿两个定位滑动导轨平移,实现了双手爪沿双导轨面的平移开合。由于该装置通过双电机来独

一种双指型欠驱动液压手指.pdf
本发明公开了一种双指型欠驱动液压手指,包括手指关节、指节底座、绳索、液压杆以及机架,手指关节包括第一指节,第一指节通过圆柱销与第二指节连接、第二指节通过圆柱销与第三指节连接,第三指节通过圆柱销连接至指节底座,在第一指节、第二指节、第三指节以及所述指节底座之间依次设有弹簧,该指节底座设置有一号滚轮和三号滚轮,该指节底座上部连接有机架,机架的内部设有液压杆。本发明采用液压驱动,适合袋装货物这类大而重的货物;双指采一个驱动器驱动,结构紧凑,提高了承载力;在结构上采用同一液压驱动一根绳索实现两根手指的抓取,更加实
刚柔耦合欠驱动手指及三指欠驱动机器人手.pdf
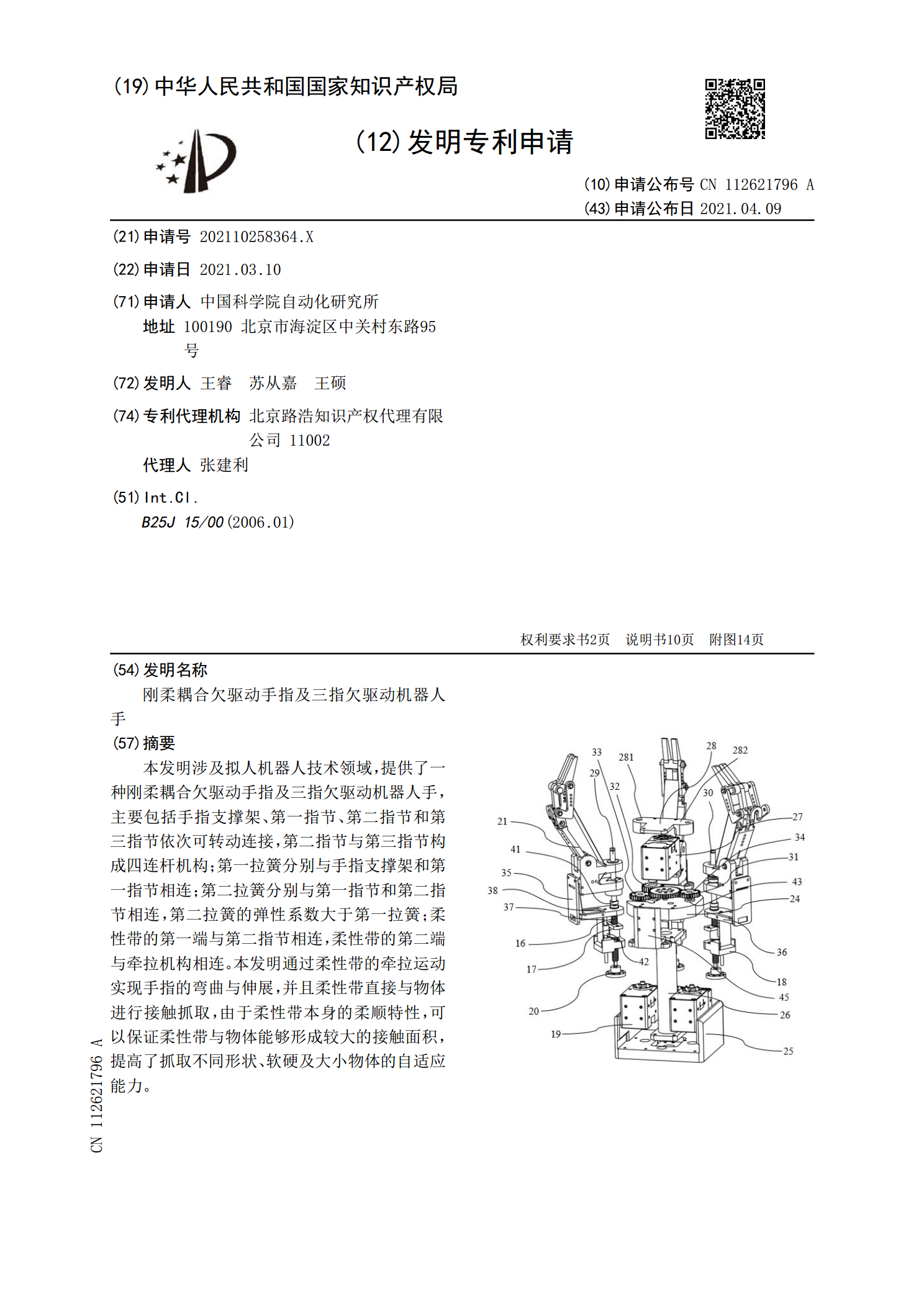
本发明涉及拟人机器人技术领域,提供了一种刚柔耦合欠驱动手指及三指欠驱动机器人手,主要包括手指支撑架、第一指节、第二指节和第三指节依次可转动连接,第二指节与第三指节构成四连杆机构;第一拉簧分别与手指支撑架和第一指节相连;第二拉簧分别与第一指节和第二指节相连,第二拉簧的弹性系数大于第一拉簧;柔性带的第一端与第二指节相连,柔性带的第二端与牵拉机构相连。本发明通过柔性带的牵拉运动实现手指的弯曲与伸展,并且柔性带直接与物体进行接触抓取,由于柔性带本身的柔顺特性,可以保证柔性带与物体能够形成较大的接触面积,提高了抓取

双驱动多指节仿生抓手.pdf
本发明涉及机器人领域。目的是提供一种双驱动多指节仿生抓手,该装置应能综合刚性连杆机构和柔性仿生机构的优点,并具有结构简单、可靠性高的特点。技术方案是:双驱动多指节仿生抓手,其特征在于:该抓手包括机架、用于驱动机架绕轴线转动的第一电机、设置在机架中的第二电机、可伸缩地定位在机架前端的托台、布置在托台四周的若干抓手分支以及用于传递第二电机动力驱动托台与抓手分支运动的传动机构;所述传动机构包括设置在机架中且平行于机架长度方向的导轨、可沿着导轨滑动的推板、由第二电机驱动的丝杆、与丝杆啮合并且固定在推板上的螺母;所