
一种双指型欠驱动液压手指.pdf

哲妍****彩妍


1/7
2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双指型欠驱动液压手指.pdf
本发明公开了一种双指型欠驱动液压手指,包括手指关节、指节底座、绳索、液压杆以及机架,手指关节包括第一指节,第一指节通过圆柱销与第二指节连接、第二指节通过圆柱销与第三指节连接,第三指节通过圆柱销连接至指节底座,在第一指节、第二指节、第三指节以及所述指节底座之间依次设有弹簧,该指节底座设置有一号滚轮和三号滚轮,该指节底座上部连接有机架,机架的内部设有液压杆。本发明采用液压驱动,适合袋装货物这类大而重的货物;双指采一个驱动器驱动,结构紧凑,提高了承载力;在结构上采用同一液压驱动一根绳索实现两根手指的抓取,更加实
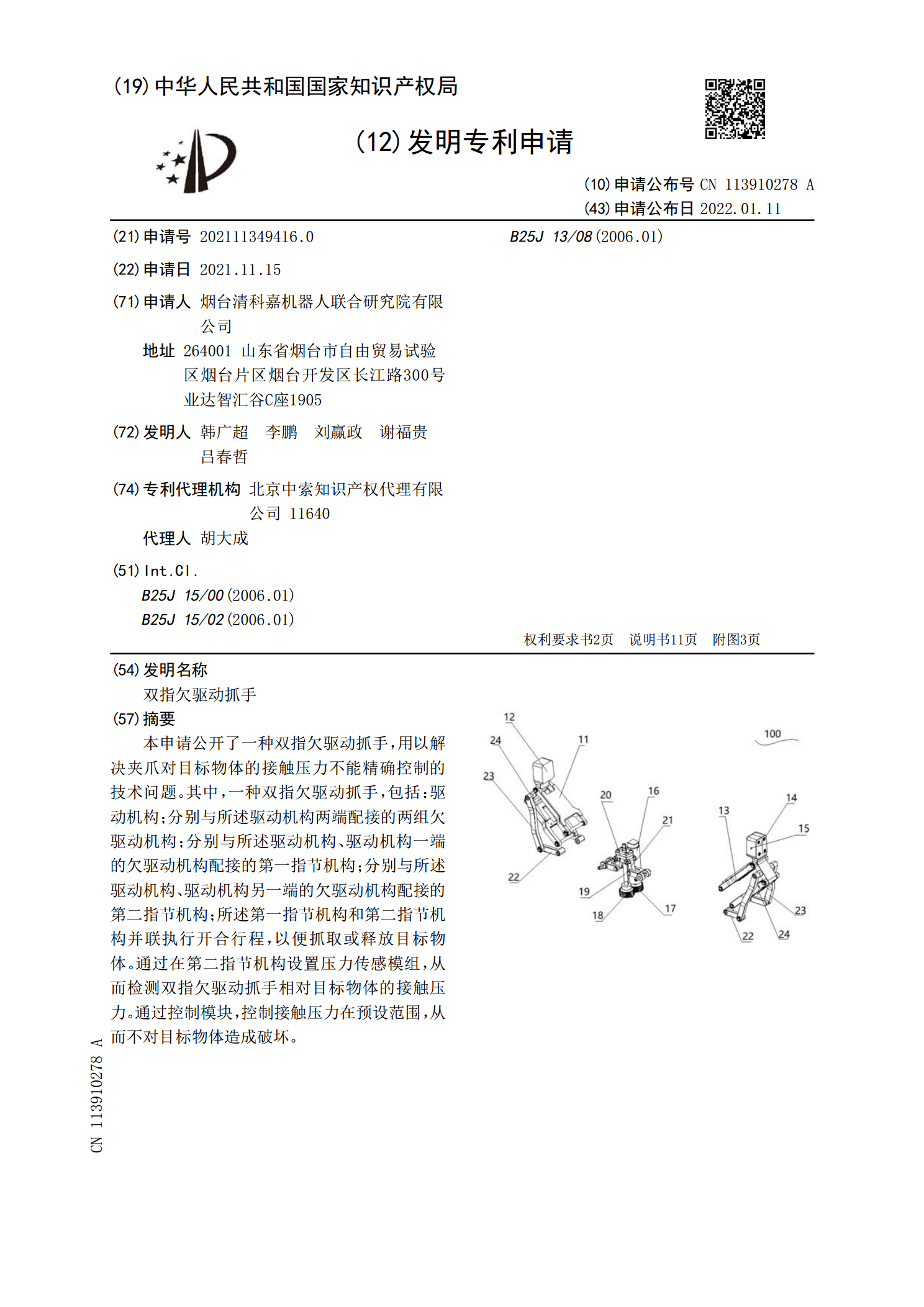
双指欠驱动抓手.pdf
本申请公开了一种双指欠驱动抓手,用以解决夹爪对目标物体的接触压力不能精确控制的技术问题。其中,一种双指欠驱动抓手,包括:驱动机构;分别与所述驱动机构两端配接的两组欠驱动机构;分别与所述驱动机构、驱动机构一端的欠驱动机构配接的第一指节机构;分别与所述驱动机构、驱动机构另一端的欠驱动机构配接的第二指节机构;所述第一指节机构和第二指节机构并联执行开合行程,以便抓取或释放目标物体。通过在第二指节机构设置压力传感模组,从而检测双指欠驱动抓手相对目标物体的接触压力。通过控制模块,控制接触压力在预设范围,从而不对目标物
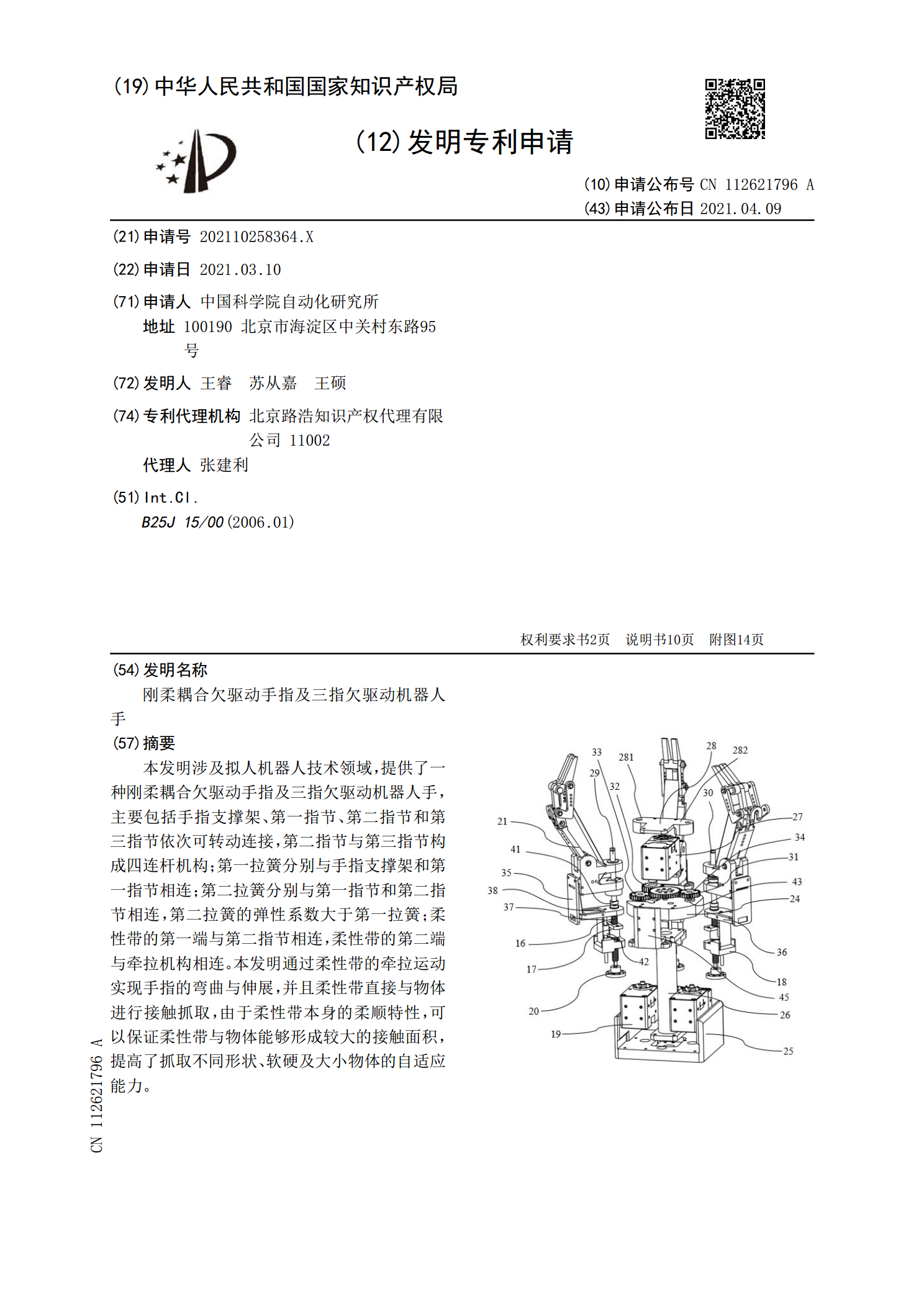
刚柔耦合欠驱动手指及三指欠驱动机器人手.pdf
本发明涉及拟人机器人技术领域,提供了一种刚柔耦合欠驱动手指及三指欠驱动机器人手,主要包括手指支撑架、第一指节、第二指节和第三指节依次可转动连接,第二指节与第三指节构成四连杆机构;第一拉簧分别与手指支撑架和第一指节相连;第二拉簧分别与第一指节和第二指节相连,第二拉簧的弹性系数大于第一拉簧;柔性带的第一端与第二指节相连,柔性带的第二端与牵拉机构相连。本发明通过柔性带的牵拉运动实现手指的弯曲与伸展,并且柔性带直接与物体进行接触抓取,由于柔性带本身的柔顺特性,可以保证柔性带与物体能够形成较大的接触面积,提高了抓取

一种欠驱动灵巧手手指.pdf
本发明公开了一种欠驱动灵巧手手指,包括远指节、远端转动关节、中指节、中间转动关节、近指节、近端转动关节、基座、弹性回复绳和腱绳。集成在指节中的预紧调节块可以通过预紧螺母调节实现腱绳的后期多次预紧。后期使用过程中腱绳松弛时通过预紧螺母调节预紧调节块,不必拆装灵巧手使得腱绳再次预紧,避免因腱绳松弛而出现较大的运动传递误差,解决了腱绳传动型灵巧手长期使用过程中腱绳松弛的问题。采用预紧调节块的弧形通孔来代替固定式滑轮的整个圆周,进一步节省了手指内部空间,使得灵巧手手指的尺寸进一步缩小,并且通过使用弧形通孔来代替滑
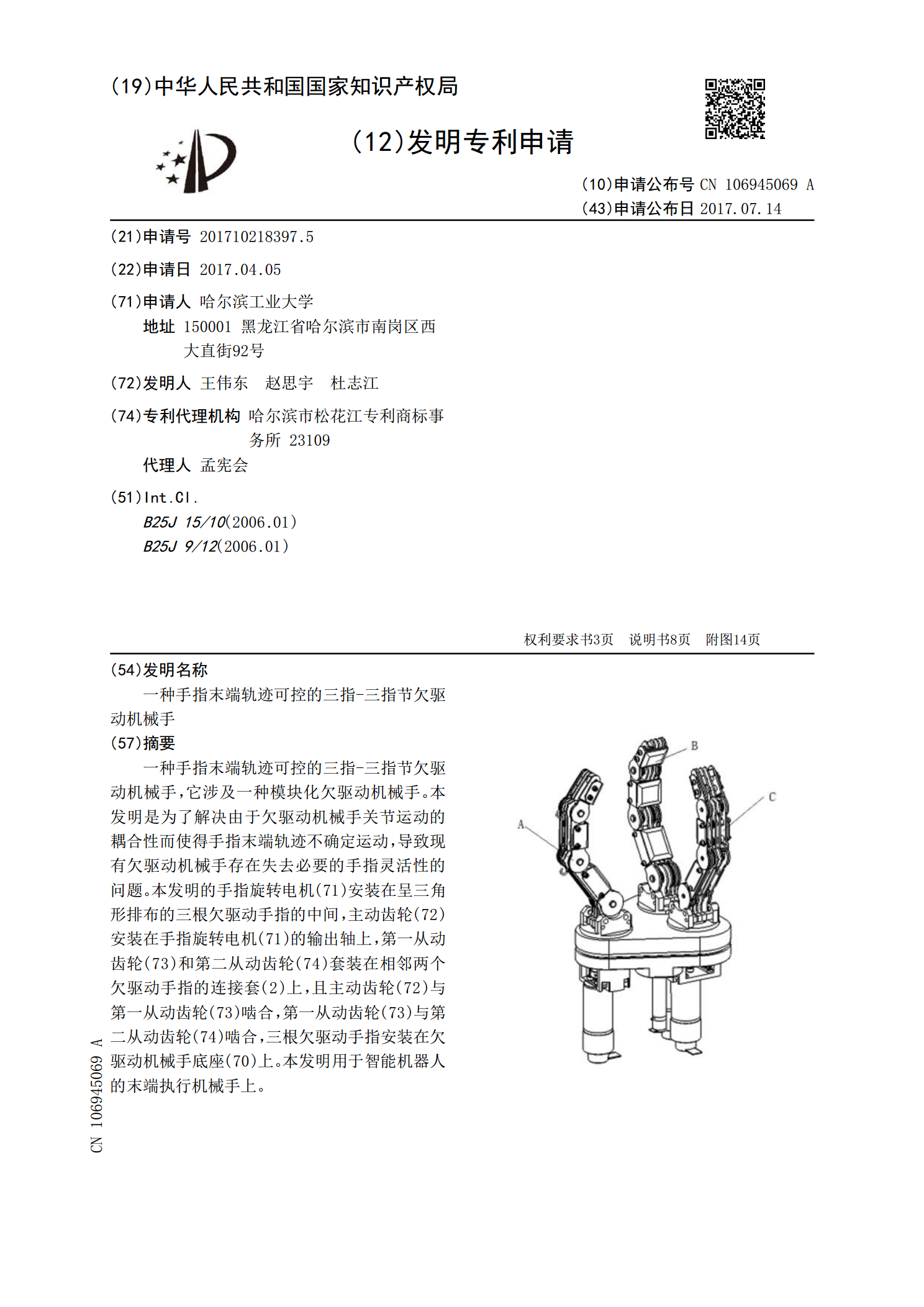
一种手指末端轨迹可控的三指‑三指节欠驱动机械手.pdf
一种手指末端轨迹可控的三指‑三指节欠驱动机械手,它涉及一种模块化欠驱动机械手。本发明是为了解决由于欠驱动机械手关节运动的耦合性而使得手指末端轨迹不确定运动,导致现有欠驱动机械手存在失去必要的手指灵活性的问题。本发明的手指旋转电机(71)安装在呈三角形排布的三根欠驱动手指的中间,主动齿轮(72)安装在手指旋转电机(71)的输出轴上,第一从动齿轮(73)和第二从动齿轮(74)套装在相邻两个欠驱动手指的连接套(2)上,且主动齿轮(72)与第一从动齿轮(73)啮合,第一从动齿轮(73)与第二从动齿轮(74)啮合,