
一种目标跟踪方法、装置、设备以及存储介质.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标跟踪方法、装置、设备以及存储介质.pdf
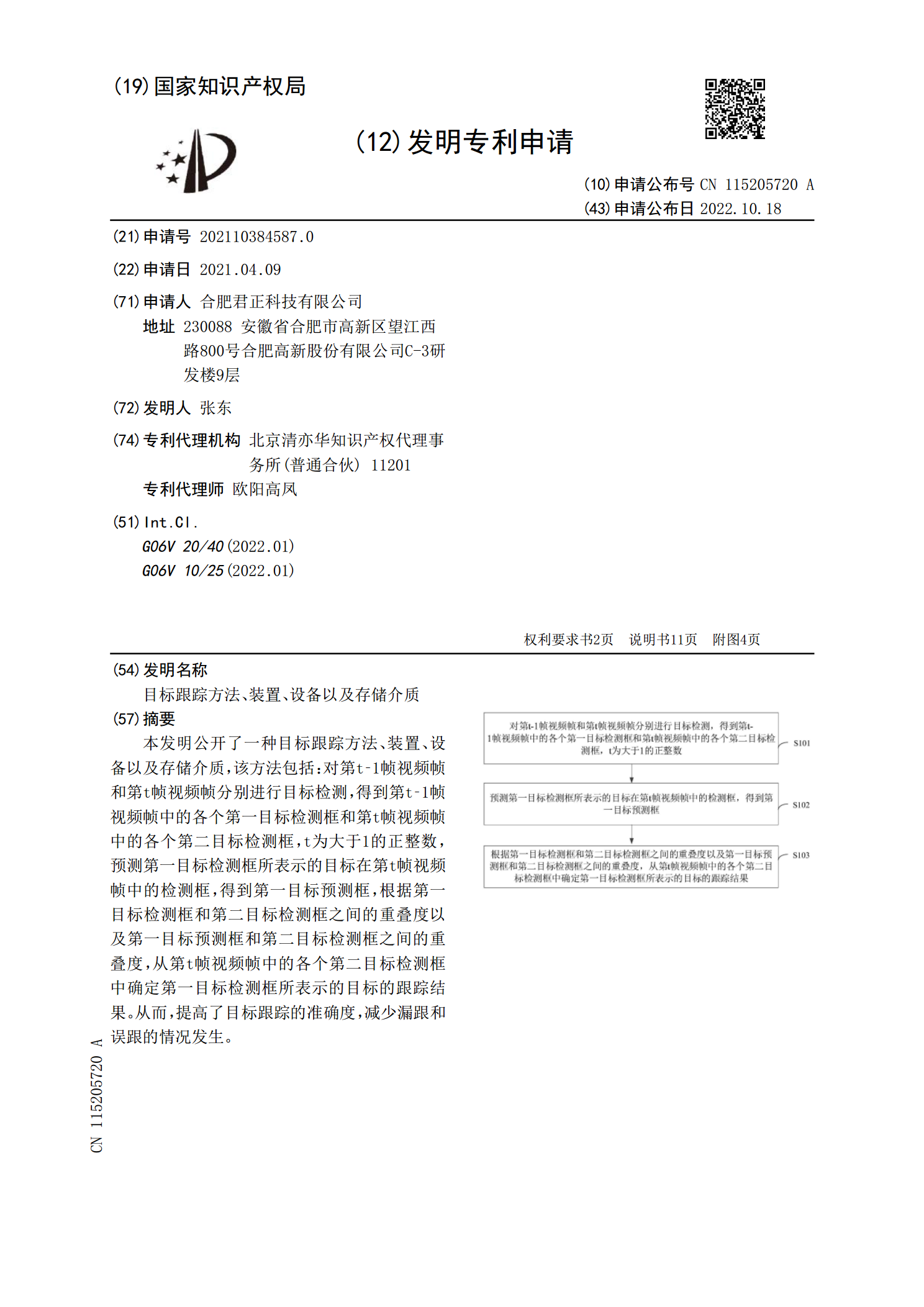
本发明公开了一种目标跟踪方法、装置、设备以及存储介质,该方法包括:对第t?1帧视频帧和第t帧视频帧分别进行目标检测,得到第t?1帧视频帧中的各个第一目标检测框和第t帧视频帧中的各个第二目标检测框,t为大于1的正整数,预测第一目标检测框所表示的目标在第t帧视频帧中的检测框,得到第一目标预测框,根据第一目标检测框和第二目标检测框之间的重叠度以及第一目标预测框和第二目标检测框之间的重叠度,从第t帧视频帧中的各个第二目标检测框中确定第一目标检测框所表示的目标的跟踪结果。从而,提高了目标跟踪的准确度,减少漏跟和误跟
目标跟踪方法、装置、设备以及存储介质.pdf
本发明公开了一种目标跟踪方法、装置、设备以及存储介质,该方法包括:对第t?1帧视频帧和第t帧视频帧分别进行目标检测,得到第t?1帧视频帧中的各个第一目标检测框和第t帧视频帧中的各个第二目标检测框,t为大于1的正整数,预测第一目标检测框所表示的目标在第t帧视频帧中的检测框,得到第一目标预测框,根据第一目标检测框和第二目标检测框之间的重叠度以及第一目标预测框和第二目标检测框之间的重叠度,从第t帧视频帧中的各个第二目标检测框中确定第一目标检测框所表示的目标的跟踪结果。从而,提高了目标跟踪的准确度,减少漏跟和误跟

一种目标跟踪方法、装置、设备以及存储介质.pdf
本申请提供一种目标跟踪方法、装置、设备以及存储介质,所述目标跟踪方法,包括:获取当前帧对应的当前彩色图像和当前红外图像,以及,前一帧对应的前一彩色图像和前一红外图像;对当前彩色图像、当前红外图像、前一彩色图像和前一红外图像进行融合处理,得到融合特征;将融合特征输入预测网络,得到预测特征图,预测特征图中包括对象在当前帧中的多个预测位置和每个预测位置对应的初步概率;根据对象在前一帧中的目标位置、对象在当前帧中的多个预测位置和每个预测位置对应的初步概率,得到每个预测位置对应的目标概率;从每个预测位置对应的目标概
目标跟踪方法、装置、电子设备以及可读存储介质.pdf
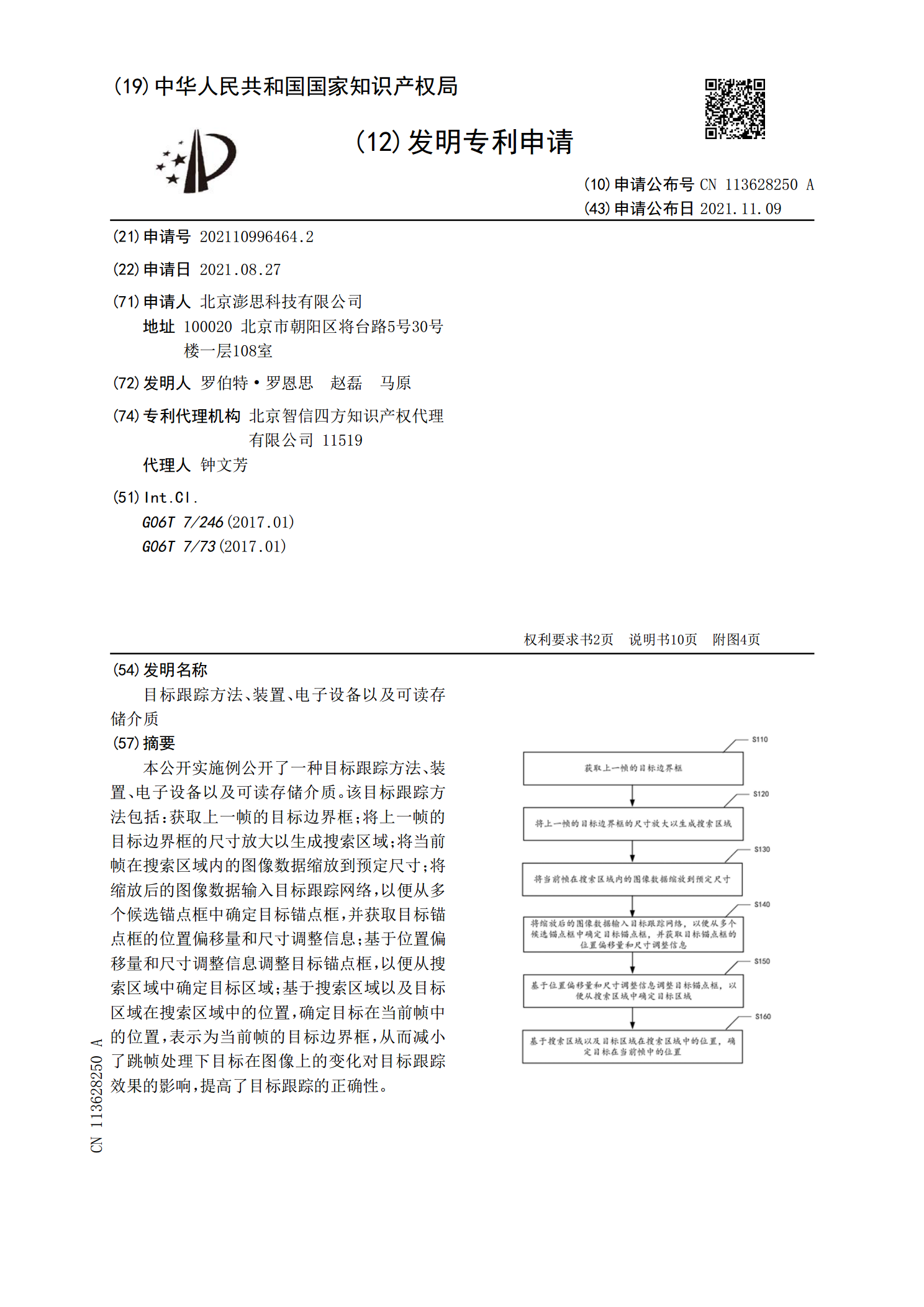
本公开实施例公开了一种目标跟踪方法、装置、电子设备以及可读存储介质。该目标跟踪方法包括:获取上一帧的目标边界框;将上一帧的目标边界框的尺寸放大以生成搜索区域;将当前帧在搜索区域内的图像数据缩放到预定尺寸;将缩放后的图像数据输入目标跟踪网络,以便从多个候选锚点框中确定目标锚点框,并获取目标锚点框的位置偏移量和尺寸调整信息;基于位置偏移量和尺寸调整信息调整目标锚点框,以便从搜索区域中确定目标区域;基于搜索区域以及目标区域在搜索区域中的位置,确定目标在当前帧中的位置,表示为当前帧的目标边界框,从而减小了跳帧处理

一种目标跟踪方法、装置、设备及存储介质.pdf
本申请实施例公开了一种目标跟踪方法、装置、设备及存储介质,该方法提出了一种基于轨迹片段填充的跟踪算法框架,进而利用该跟踪算法框架实现对于目标场景中各个待跟踪目标的跟踪。该方法先基于候选轨迹片段集合中轨迹片段的外观特征构建种子轨迹片段集合,由于基于外观特征构建种子轨迹片段集合时不受时空限制,因此所属于同一种子轨迹片段集合的各轨迹片段在时间上可跨越长时间段,在空间上可跨越广泛的空间区域;进而,基于候选轨迹片段集合中其它轨迹片段的时间信息和空间信息,对种子轨迹片段集合进行轨迹片段填充处理,以进一步保证种子轨迹片