
对象检测的方法和装置.pdf

努力****元恺


1/10
2/10
3/10

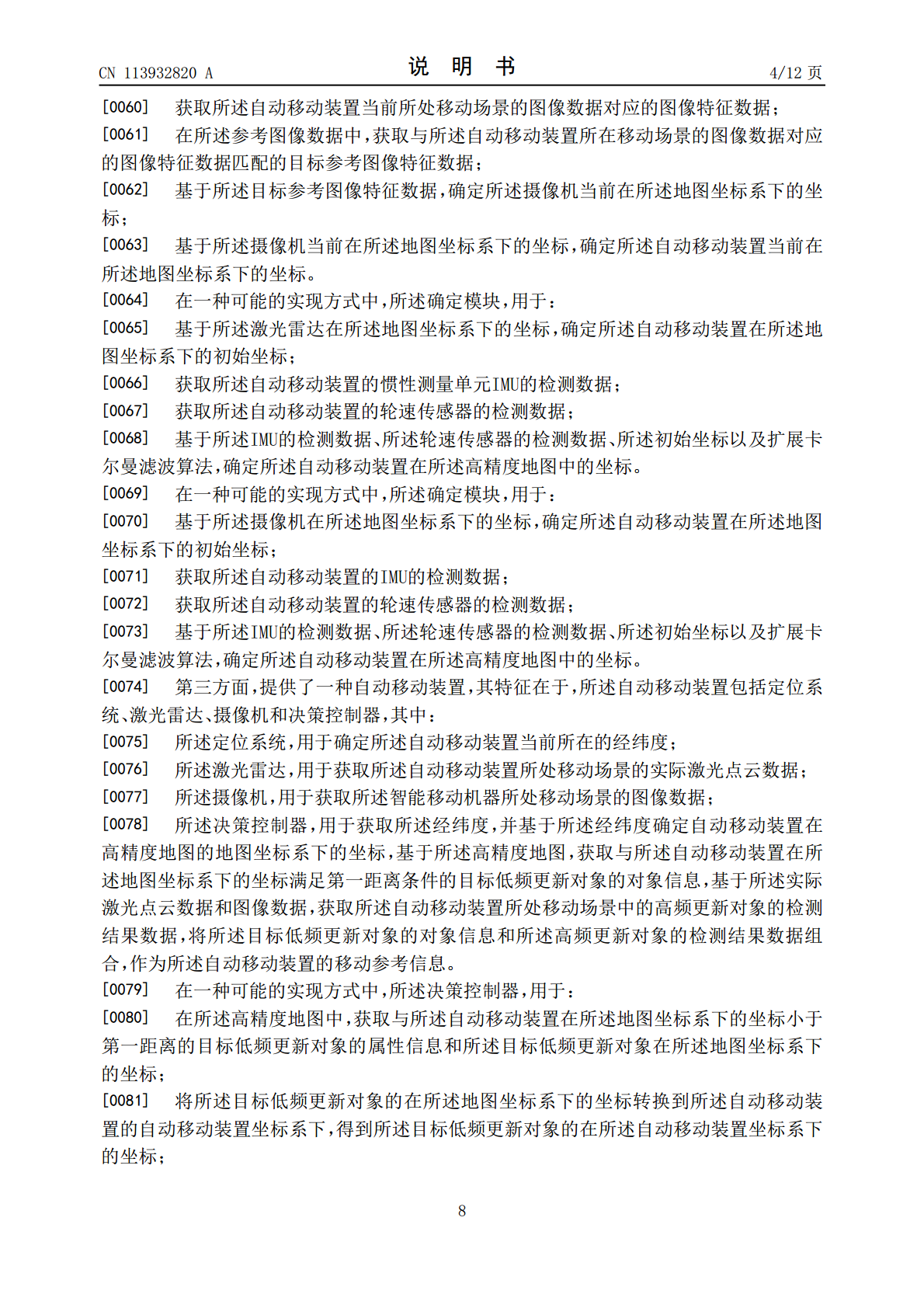
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
对象检测的方法和装置.pdf
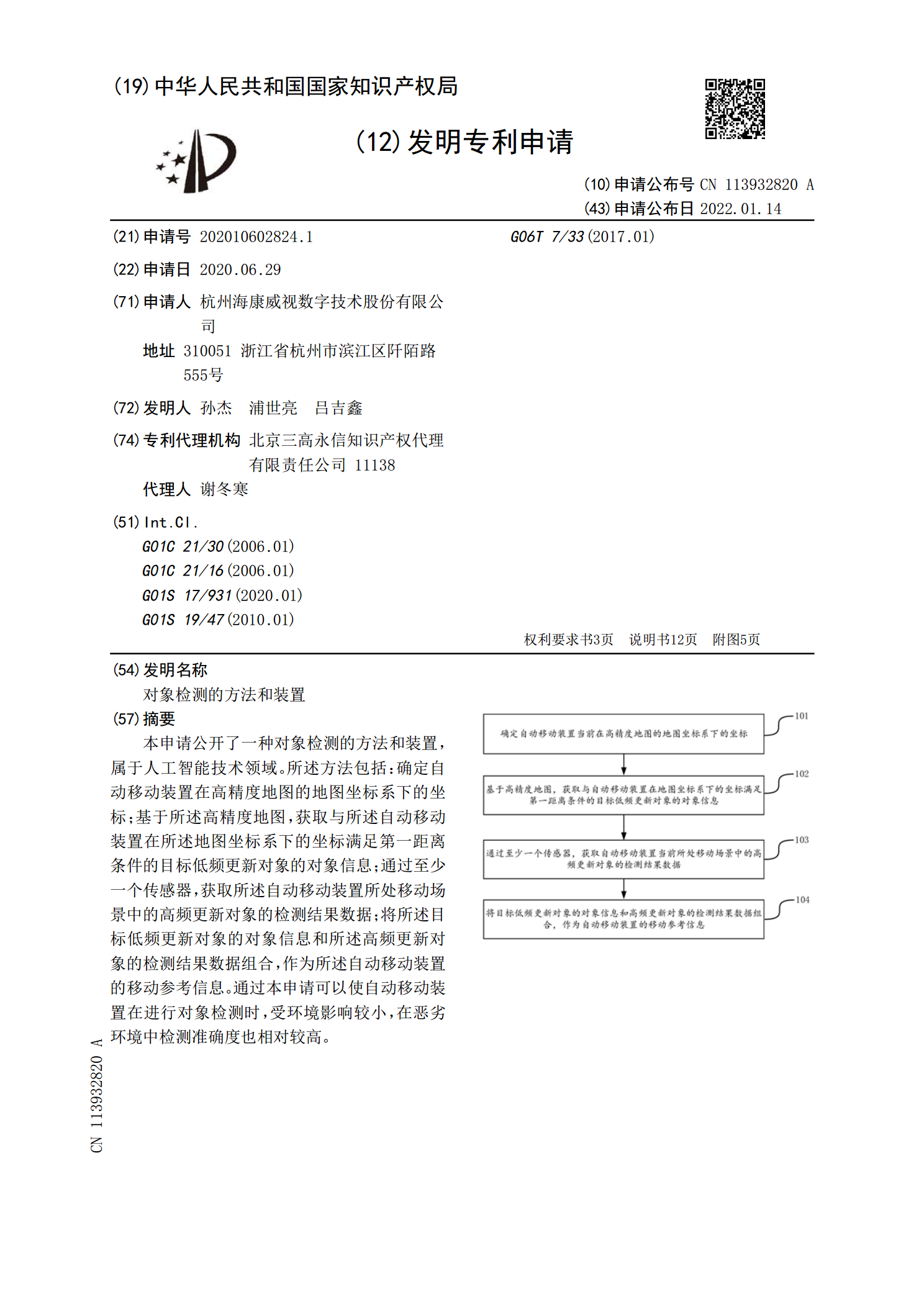
本申请公开了一种对象检测的方法和装置,属于人工智能技术领域。所述方法包括:确定自动移动装置在高精度地图的地图坐标系下的坐标;基于所述高精度地图,获取与所述自动移动装置在所述地图坐标系下的坐标满足第一距离条件的目标低频更新对象的对象信息;通过至少一个传感器,获取所述自动移动装置所处移动场景中的高频更新对象的检测结果数据;将所述目标低频更新对象的对象信息和所述高频更新对象的检测结果数据组合,作为所述自动移动装置的移动参考信息。通过本申请可以使自动移动装置在进行对象检测时,受环境影响较小,在恶劣环境中检测准确度
用于检测对象的装置和方法.pdf
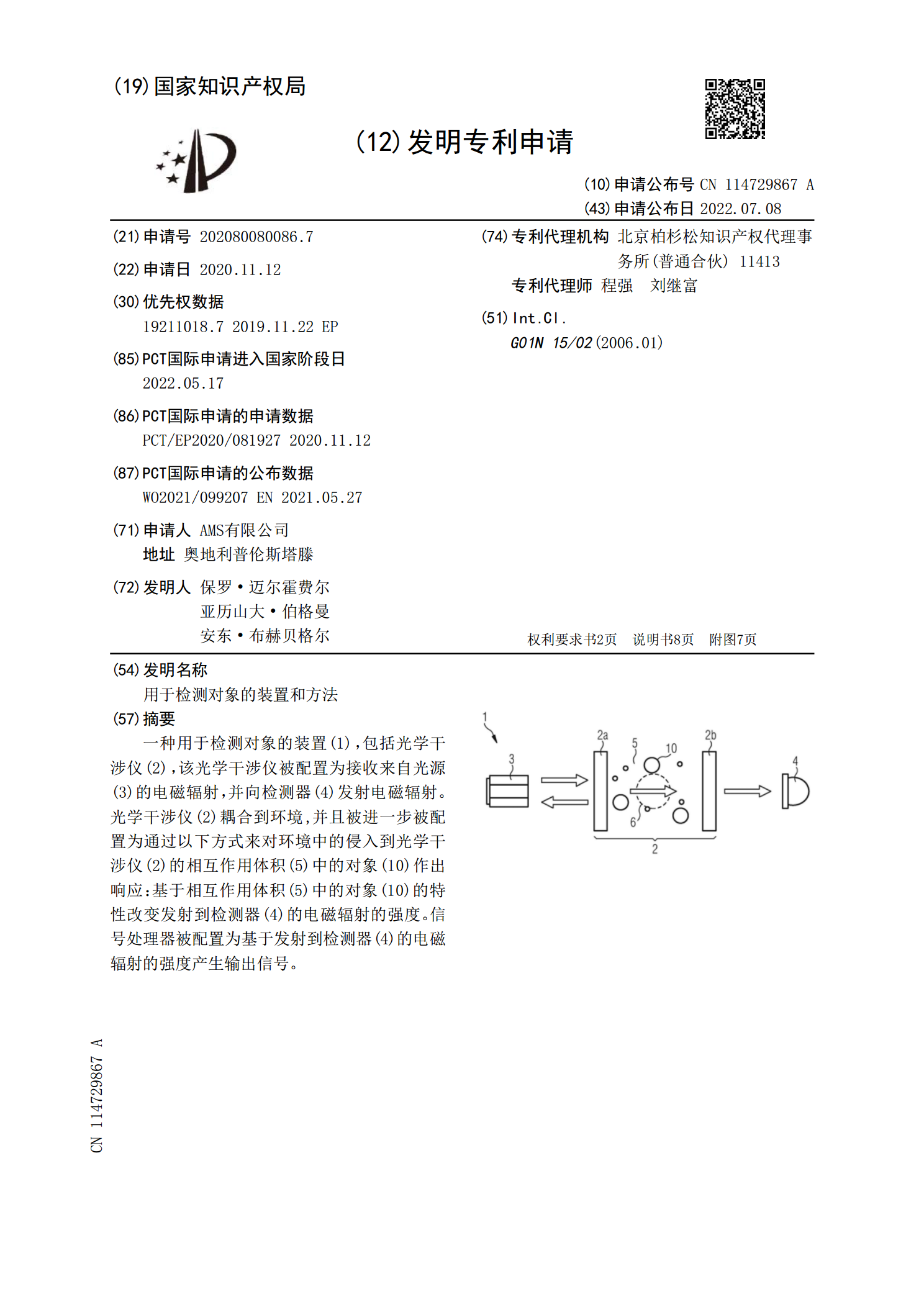
一种用于检测对象的装置(1),包括光学干涉仪(2),该光学干涉仪被配置为接收来自光源(3)的电磁辐射,并向检测器(4)发射电磁辐射。光学干涉仪(2)耦合到环境,并且被进一步被配置为通过以下方式来对环境中的侵入到光学干涉仪(2)的相互作用体积(5)中的对象(10)作出响应:基于相互作用体积(5)中的对象(10)的特性改变发射到检测器(4)的电磁辐射的强度。信号处理器被配置为基于发射到检测器(4)的电磁辐射的强度产生输出信号。

用于检测目标对象的方法和装置.pdf
本公开的实施例公开了用于检测目标对象的方法和装置。该方法的一具体实施方式包括:获取当前驾驶场景的图像;对当前驾驶场景的图像进行目标对象检测,确定出当前驾驶场景的图像中的目标对象的类别作为目标类别,以及确定出当前驾驶场景的图像中的目标对象的位置作为目标位置;基于预设的各类别目标对象在驾驶场景图像中出现位置的概率分布,确定目标类别的目标对象在目标位置出现的概率;响应于确定目标类别的目标对象在目标位置出现的概率超过预设的阈值,对检测出的当前驾驶场景的图像中的目标对象进行增强现实渲染。该实施方式实现了目标对象检测

检测图像中的对象的装置和方法、分类器生成装置和方法.pdf
检测图像中的对象的装置和方法和分类器生成装置和方法。对图像中的对象进行检测的方法包括:在以图像中的特定点为极点的极坐标系中,用多条极线和以极点为圆心的多个圆划分网格,网格是相邻极线与相邻圆或与最小圆限定的区域,极线的条数和圆的个数为常数,最大圆的半径大于等于前景图像的像素与特定点之间的最大距离;针对每个网格,至少计算前景图像中轮廓像素相对于网格的参考方向的梯度方向并且根据梯度方向获得网格的梯度方向直方图;将所有网格的梯度方向直方图连接成总直方图向量,每对相邻极线限定的网格的梯度方向直方图的连接顺序相同,对
目标对象关键点检测方法和装置.pdf
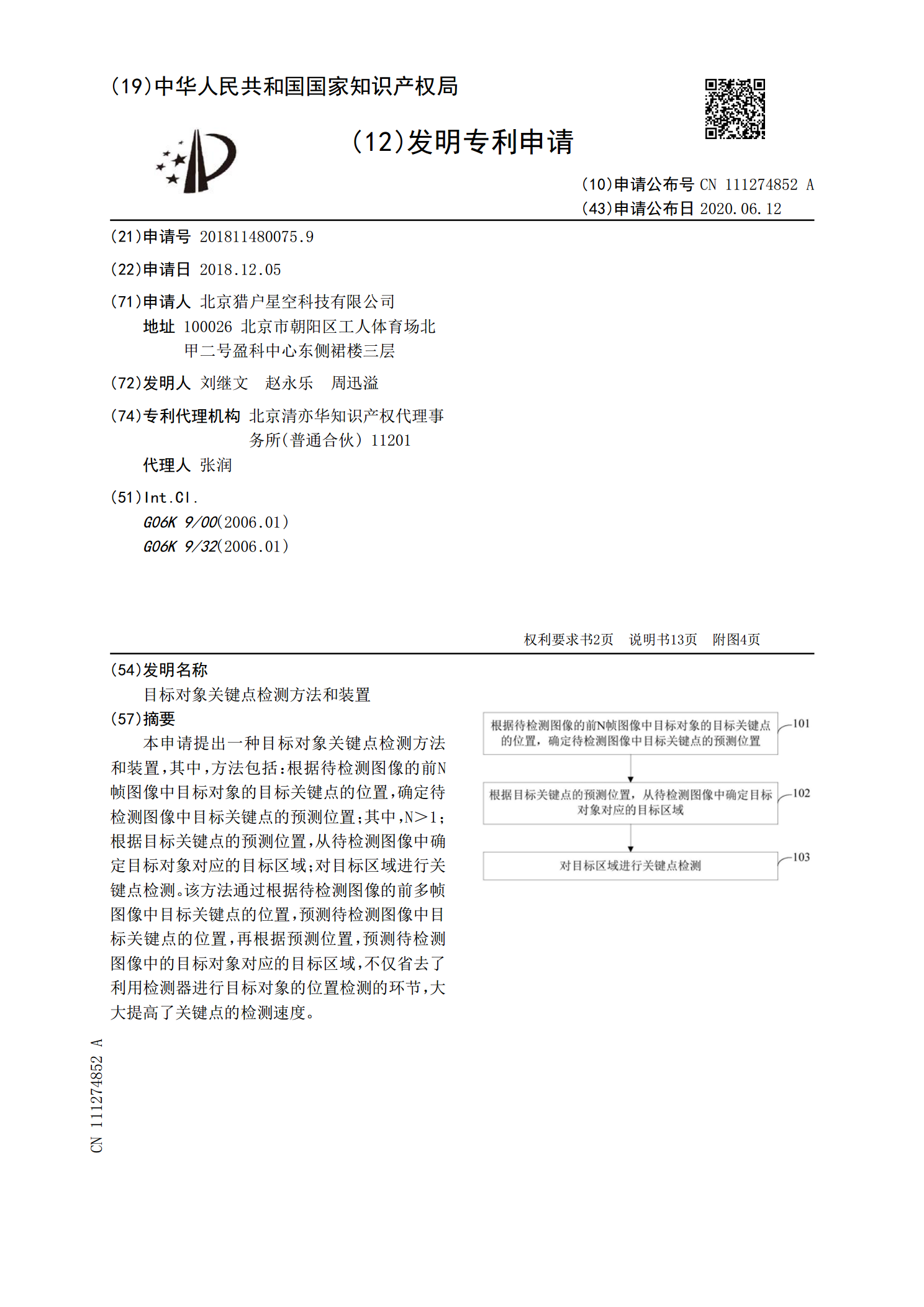
本申请提出一种目标对象关键点检测方法和装置,其中,方法包括:根据待检测图像的前N帧图像中目标对象的目标关键点的位置,确定待检测图像中目标关键点的预测位置;其中,N>1;根据目标关键点的预测位置,从待检测图像中确定目标对象对应的目标区域;对目标区域进行关键点检测。该方法通过根据待检测图像的前多帧图像中目标关键点的位置,预测待检测图像中目标关键点的位置,再根据预测位置,预测待检测图像中的目标对象对应的目标区域,不仅省去了利用检测器进行目标对象的位置检测的环节,大大提高了关键点的检测速度。