
线性马达的控制方法、控制装置、设备以及介质.pdf

瀚玥****魔王

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
线性马达的控制方法、控制装置、设备以及介质.pdf
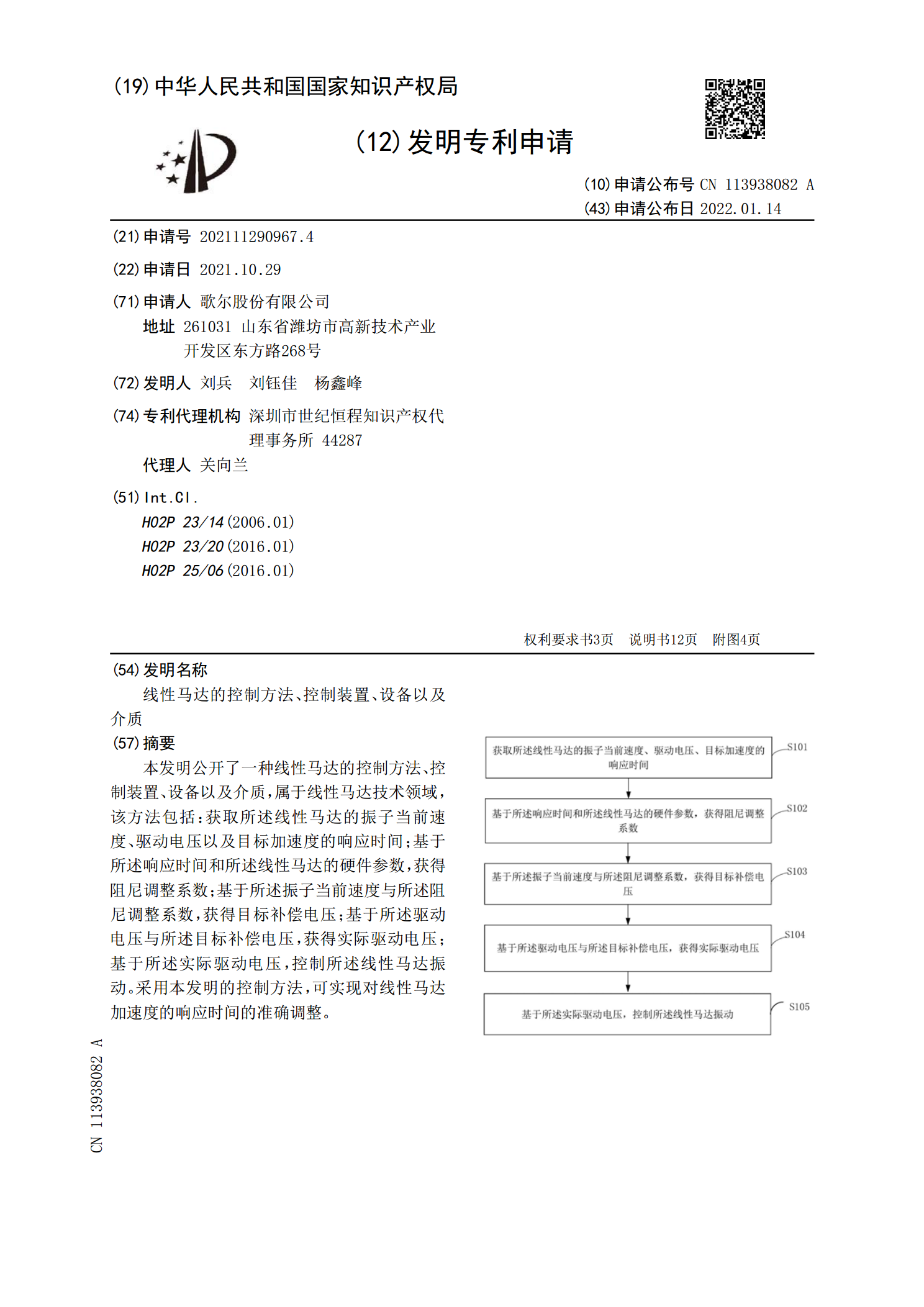
本发明公开了一种线性马达的控制方法、控制装置、设备以及介质,属于线性马达技术领域,该方法包括:获取所述线性马达的振子当前速度、驱动电压以及目标加速度的响应时间;基于所述响应时间和所述线性马达的硬件参数,获得阻尼调整系数;基于所述振子当前速度与所述阻尼调整系数,获得目标补偿电压;基于所述驱动电压与所述目标补偿电压,获得实际驱动电压;基于所述实际驱动电压,控制所述线性马达振动。采用本发明的控制方法,可实现对线性马达加速度的响应时间的准确调整。
线性马达的控制方法、控制装置、设备以及介质.pdf
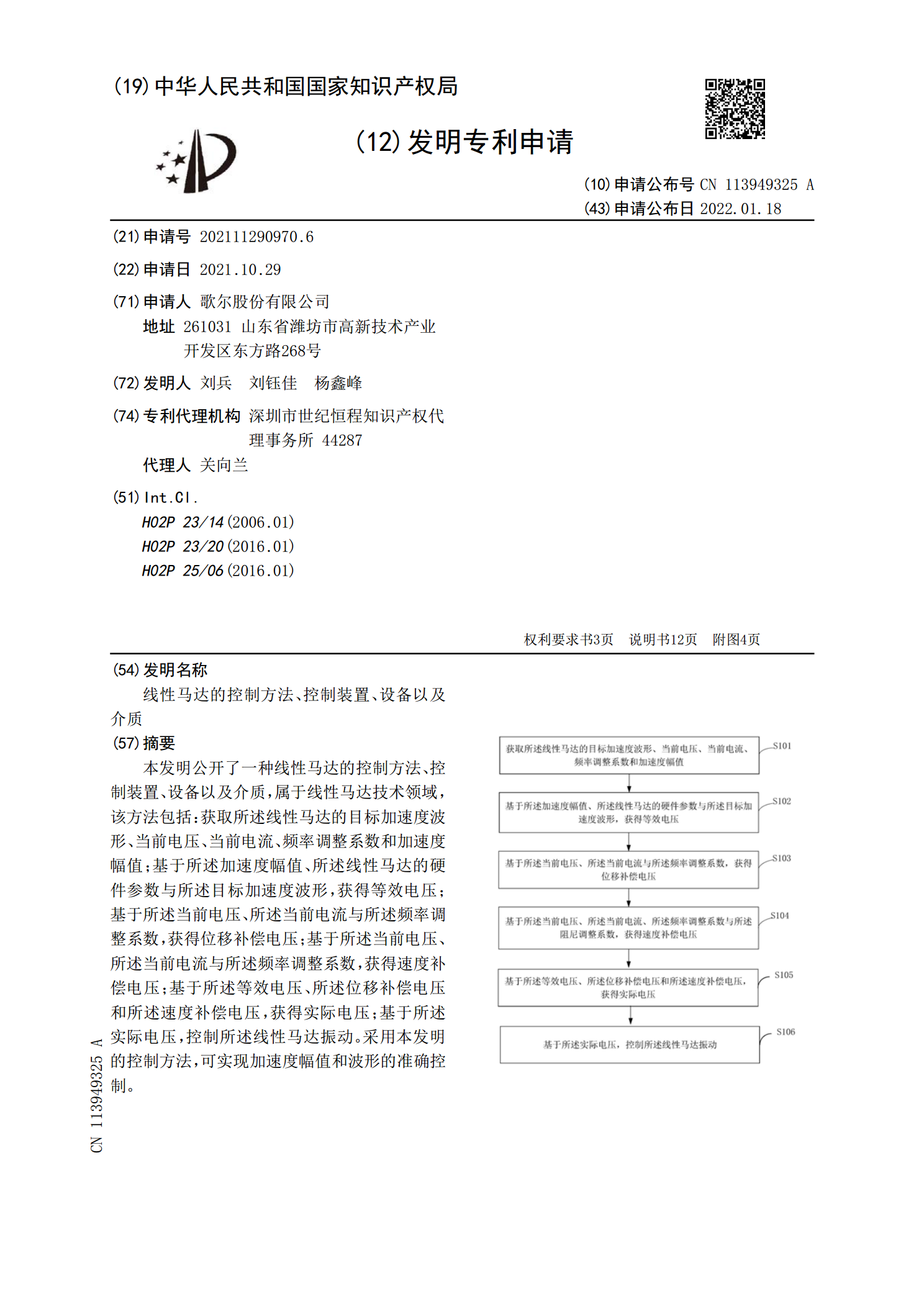
本发明公开了一种线性马达的控制方法、控制装置、设备以及介质,属于线性马达技术领域,该方法包括:获取所述线性马达的目标加速度波形、当前电压、当前电流、频率调整系数和加速度幅值;基于所述加速度幅值、所述线性马达的硬件参数与所述目标加速度波形,获得等效电压;基于所述当前电压、所述当前电流与所述频率调整系数,获得位移补偿电压;基于所述当前电压、所述当前电流与所述频率调整系数,获得速度补偿电压;基于所述等效电压、所述位移补偿电压和所述速度补偿电压,获得实际电压;基于所述实际电压,控制所述线性马达振动。采用本发明的控
马达控制装置以及马达控制方法.pdf
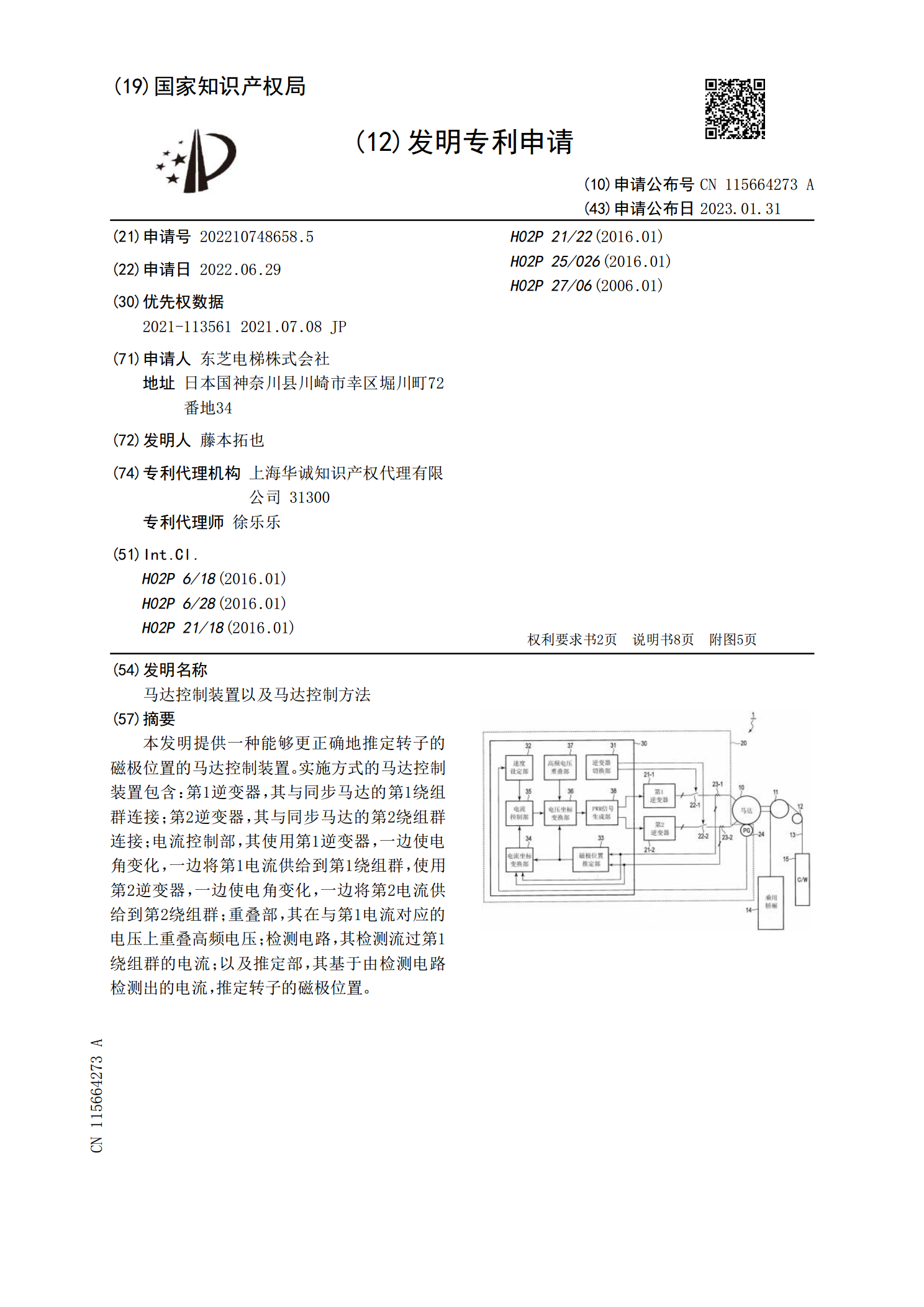
本发明提供一种能够更正确地推定转子的磁极位置的马达控制装置。实施方式的马达控制装置包含:第1逆变器,其与同步马达的第1绕组群连接;第2逆变器,其与同步马达的第2绕组群连接;电流控制部,其使用第1逆变器,一边使电角变化,一边将第1电流供给到第1绕组群,使用第2逆变器,一边使电角变化,一边将第2电流供给到第2绕组群;重叠部,其在与第1电流对应的电压上重叠高频电压;检测电路,其检测流过第1绕组群的电流;以及推定部,其基于由检测电路检测出的电流,推定转子的磁极位置。
用于控制马达制动装置的方法以及马达制动装置.pdf
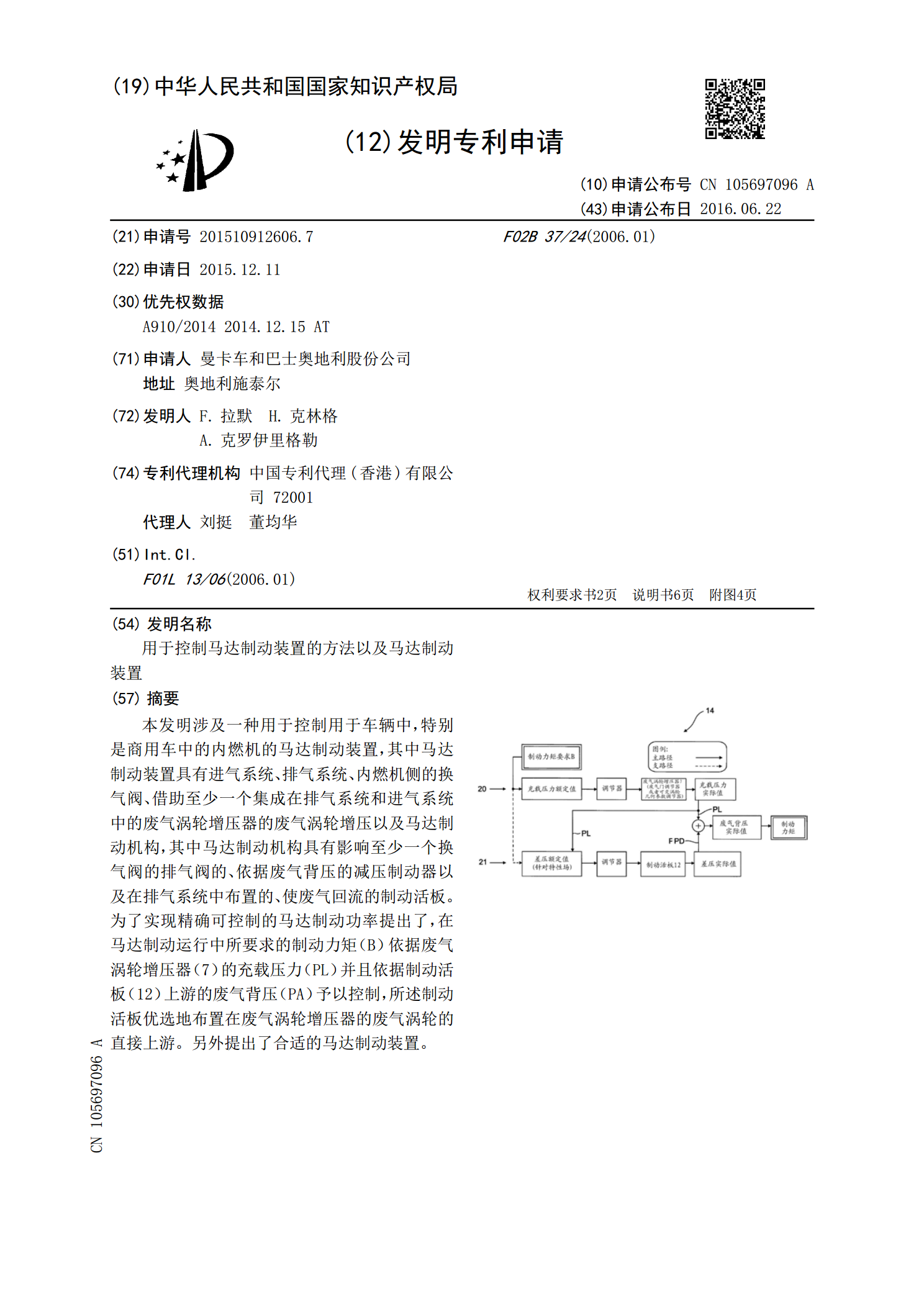
本发明涉及一种用于控制用于车辆中,特别是商用车中的内燃机的马达制动装置,其中马达制动装置具有进气系统、排气系统、内燃机侧的换气阀、借助至少一个集成在排气系统和进气系统中的废气涡轮增压器的废气涡轮增压以及马达制动机构,其中马达制动机构具有影响至少一个换气阀的排气阀的、依据废气背压的减压制动器以及在排气系统中布置的、使废气回流的制动活板。为了实现精确可控制的马达制动功率提出了,在马达制动运行中所要求的制动力矩(B)依据废气涡轮增压器(7)的充载压力(PL)并且依据制动活板(12)上游的废气背压(PA)予以控制
控制方法、装置、设备以及存储介质.pdf
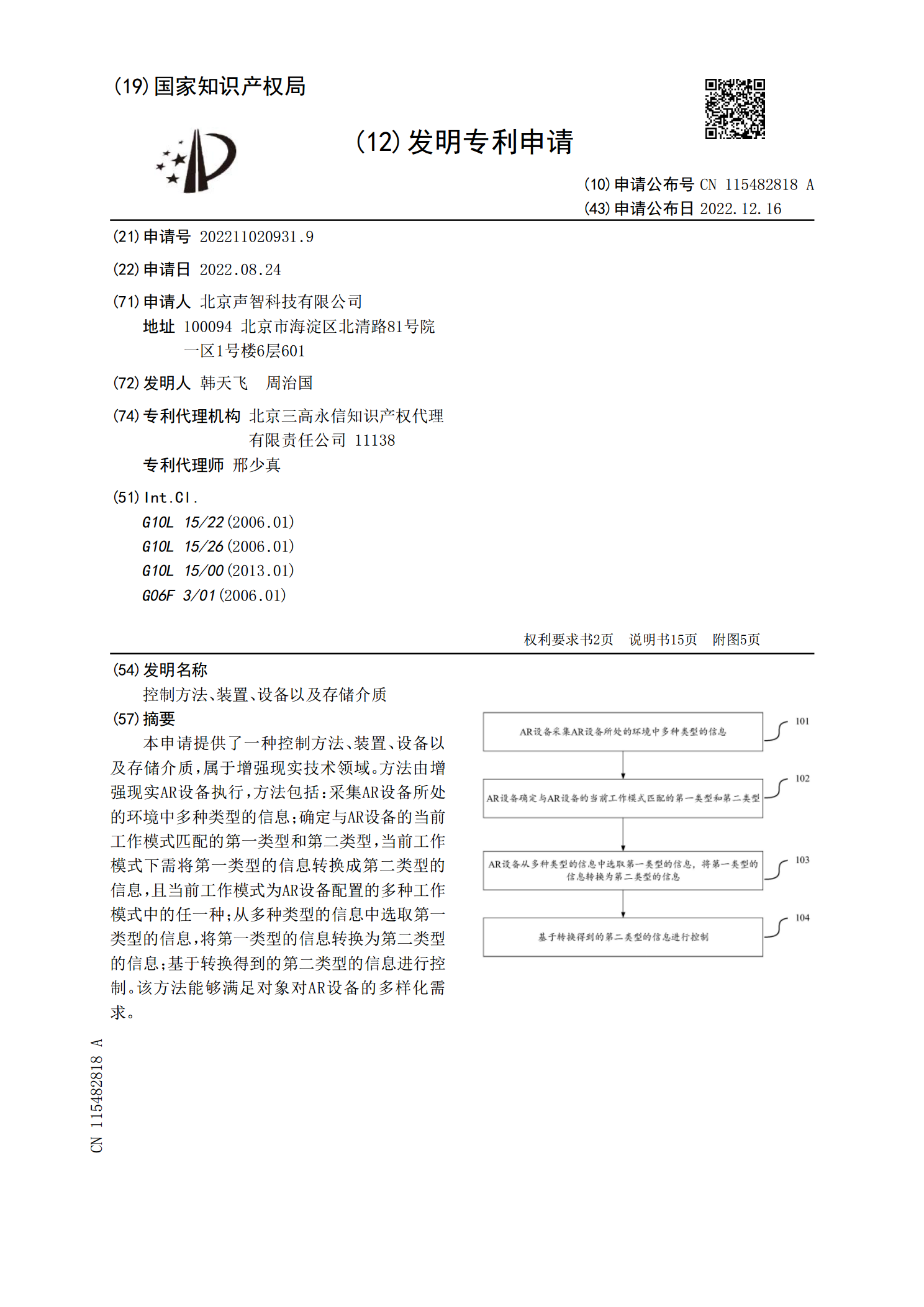
本申请提供了一种控制方法、装置、设备以及存储介质,属于增强现实技术领域。方法由增强现实AR设备执行,方法包括:采集AR设备所处的环境中多种类型的信息;确定与AR设备的当前工作模式匹配的第一类型和第二类型,当前工作模式下需将第一类型的信息转换成第二类型的信息,且当前工作模式为AR设备配置的多种工作模式中的任一种;从多种类型的信息中选取第一类型的信息,将第一类型的信息转换为第二类型的信息;基于转换得到的第二类型的信息进行控制。该方法能够满足对象对AR设备的多样化需求。