
仿生伸缩包络式目标抓取机器人及其目标抓取执行系统及其末端执行器及其抓取方法.pdf

春岚****23

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿生伸缩包络式目标抓取机器人及其目标抓取执行系统及其末端执行器及其抓取方法.pdf
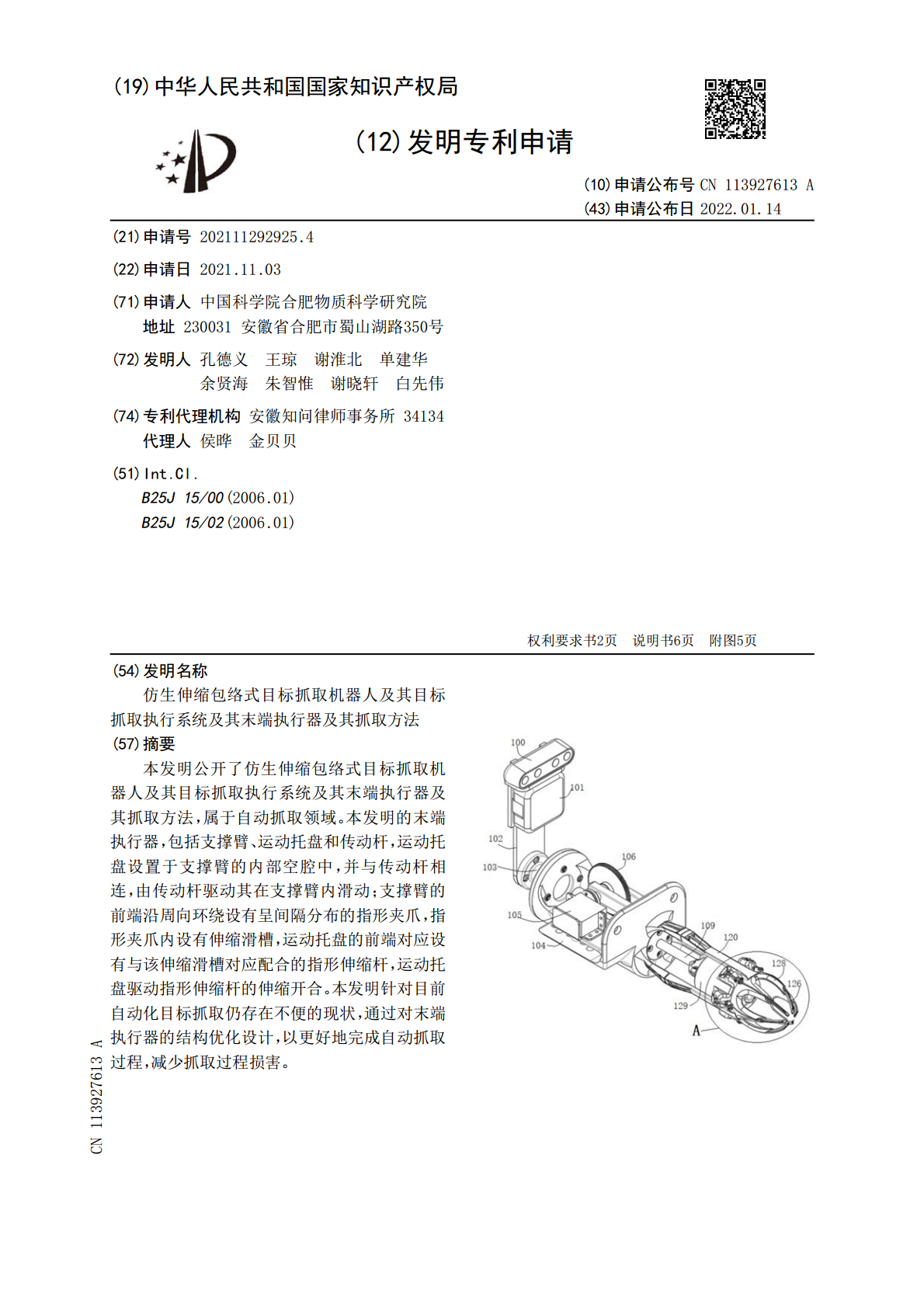
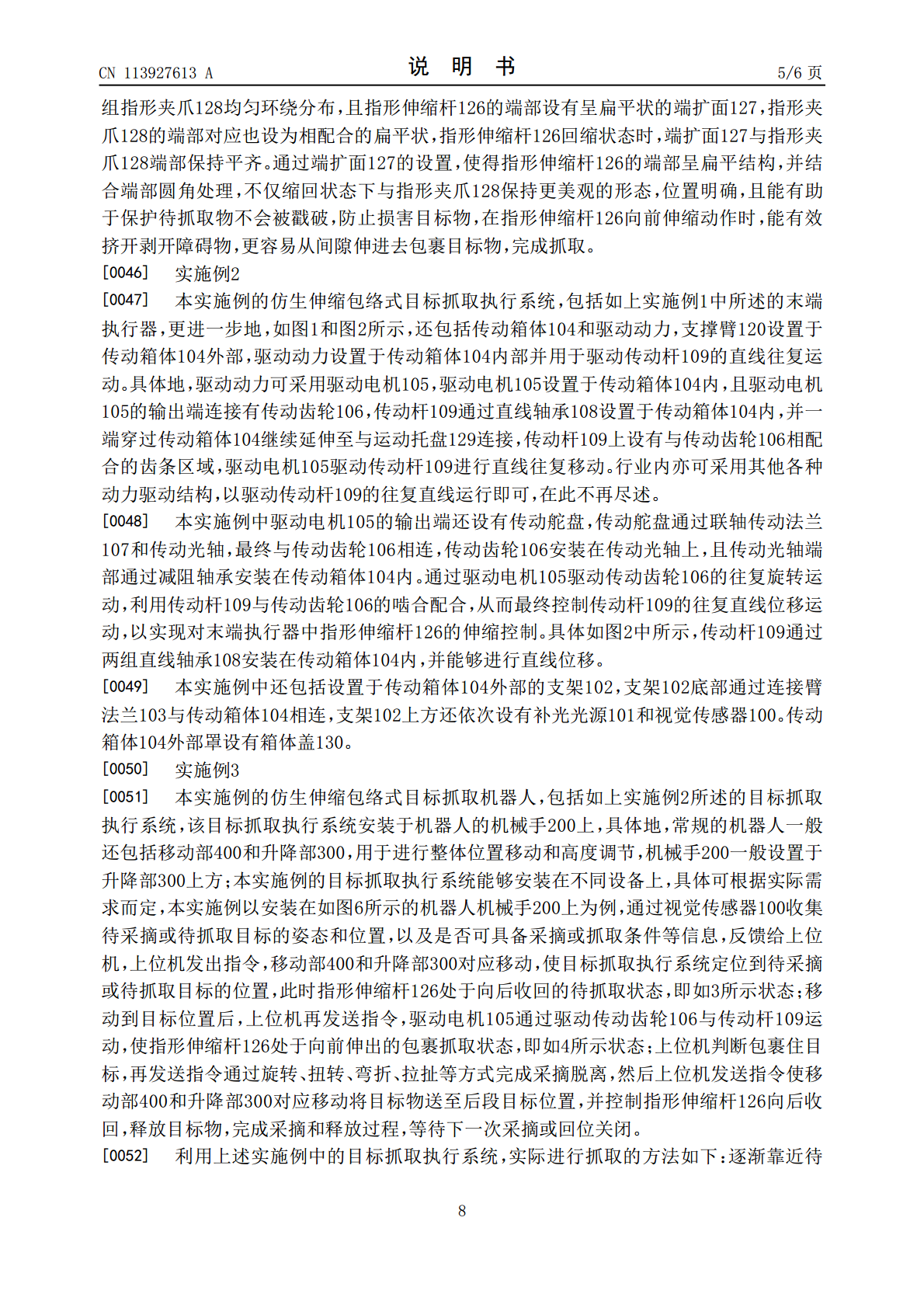
本发明公开了仿生伸缩包络式目标抓取机器人及其目标抓取执行系统及其末端执行器及其抓取方法,属于自动抓取领域。本发明的末端执行器,包括支撑臂、运动托盘和传动杆,运动托盘设置于支撑臂的内部空腔中,并与传动杆相连,由传动杆驱动其在支撑臂内滑动;支撑臂的前端沿周向环绕设有呈间隔分布的指形夹爪,指形夹爪内设有伸缩滑槽,运动托盘的前端对应设有与该伸缩滑槽对应配合的指形伸缩杆,运动托盘驱动指形伸缩杆的伸缩开合。本发明针对目前自动化目标抓取仍存在不便的现状,通过对末端执行器的结构优化设计,以更好地完成自动抓取过程,减少抓取
推压式抓取机构及其方法.pdf
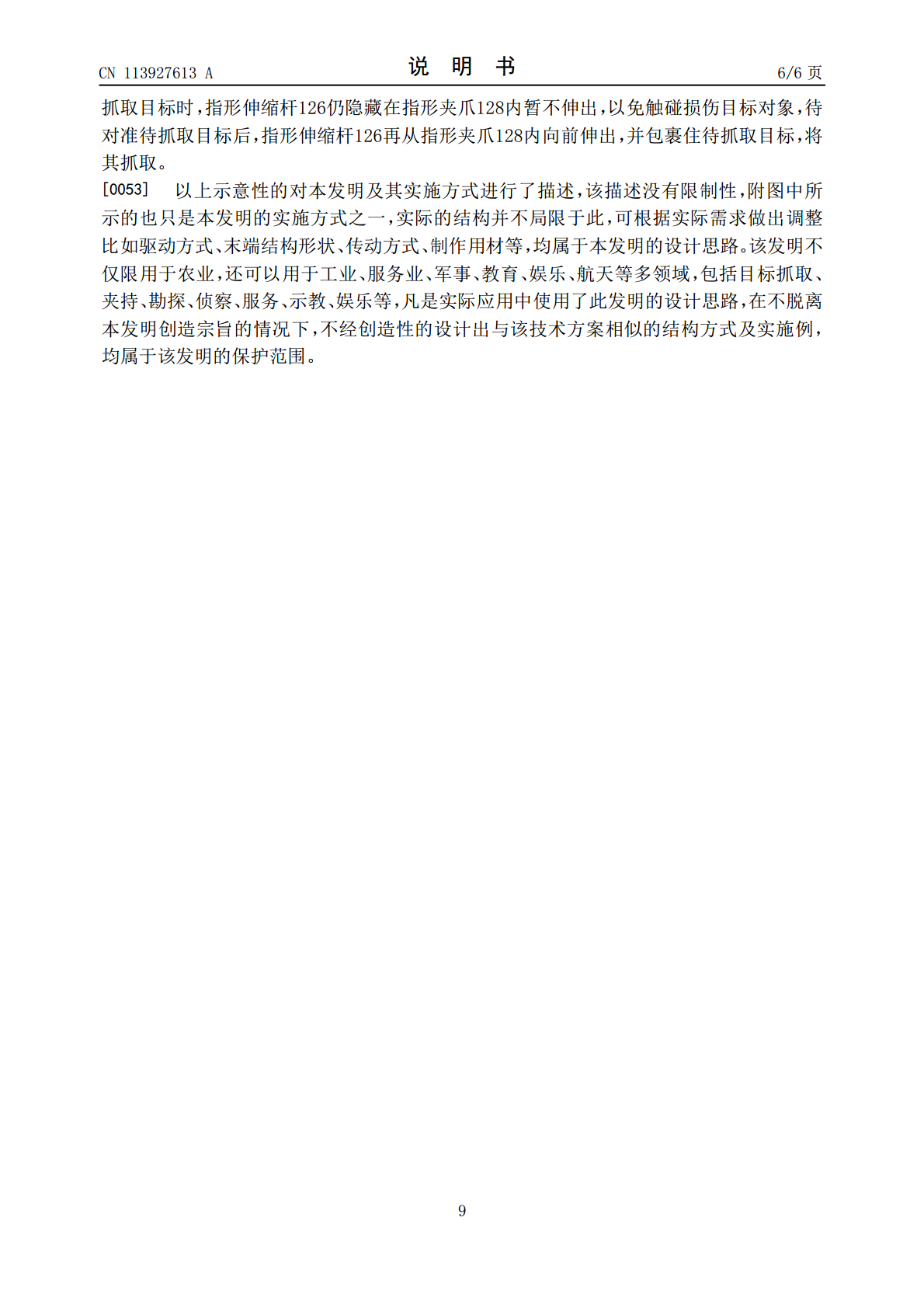
本发明所述推压式抓取机构及其方法,提出一种新的推压式传动与夹持锁定机构,以期通过较为简化的结构设计实现抓取准确快捷、传动距离短而抓取稳定性高的设计目的。所述推压式抓取机构包括有基座,在基座上连接有一组抱爪,在基座内部设置有驱动抱爪实现径向开合的驱动机构;所述的驱动机构包括设置于基座内部的导套,推压杆贯穿基座后与驱动杆通过相互间的棘齿与棘轮咬合机构进行连接;在导套内、驱动杆上套设有复位弹簧;在驱动杆端部连接有,夹持在两侧抱爪之间的舌板。通过舌板轴向运动而挤压抱爪的不同位置,可直接导致抱爪径向上的开合状态。
机器人末端抓取系统.pdf
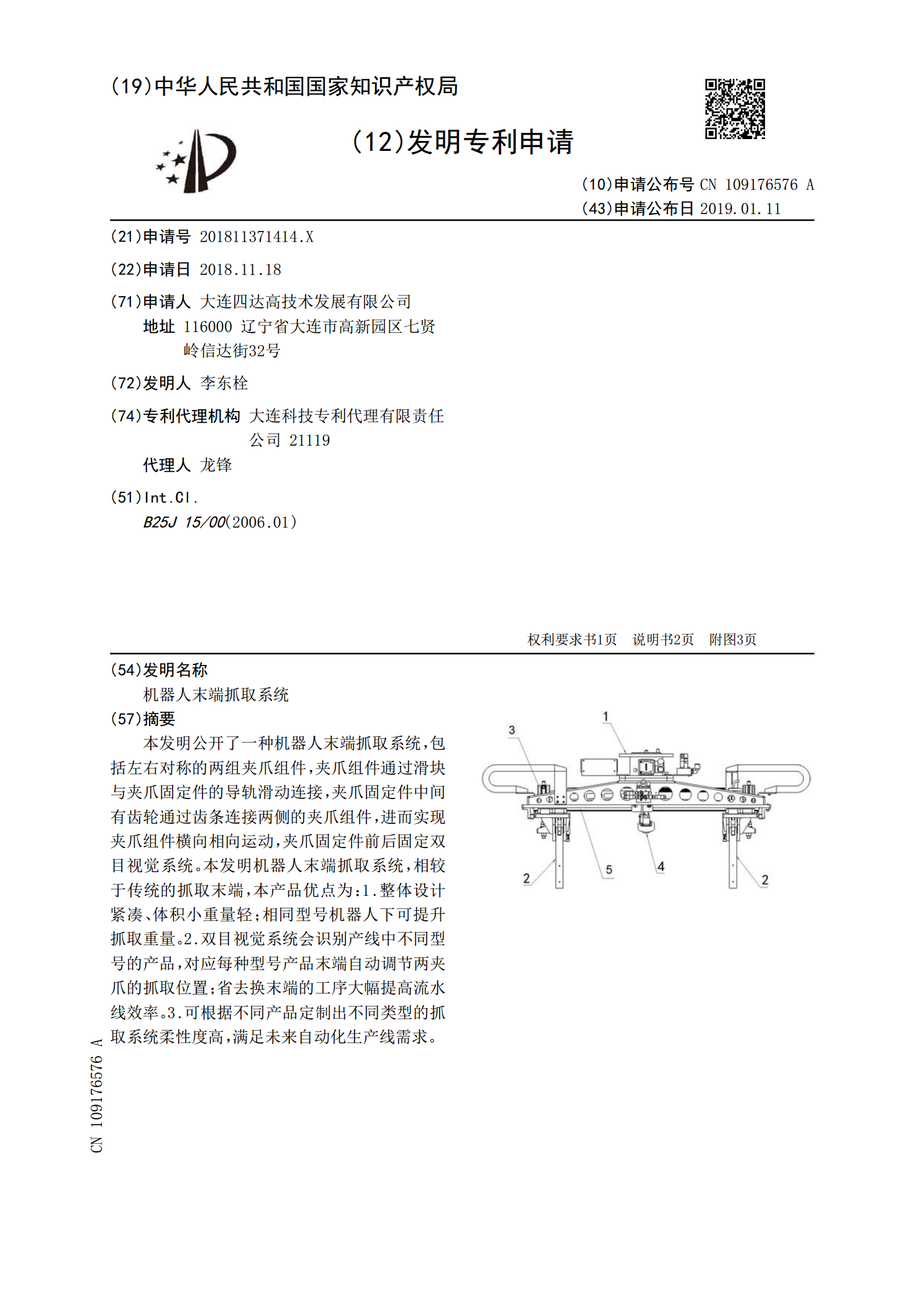
本发明公开了一种机器人末端抓取系统,包括左右对称的两组夹爪组件,夹爪组件通过滑块与夹爪固定件的导轨滑动连接,夹爪固定件中间有齿轮通过齿条连接两侧的夹爪组件,进而实现夹爪组件横向相向运动,夹爪固定件前后固定双目视觉系统。本发明机器人末端抓取系统,相较于传统的抓取末端,本产品优点为:1.整体设计紧凑、体积小重量轻;相同型号机器人下可提升抓取重量。2.双目视觉系统会识别产线中不同型号的产品,对应每种型号产品末端自动调节两夹爪的抓取位置;省去换末端的工序大幅提高流水线效率。3.可根据不同产品定制出不同类型的抓取系

一种多人抓取娃娃机及其抓取方法.pdf
本发明公开了一种多人抓取娃娃机及其抓取方法,包括娃娃机机组,娃娃机机组内均设有控制终端,控制终端均与后台服务器相连接,娃娃机机组的一侧顶端中部设有视频监控终端,视频监控终端与娃娃机机组一侧的显示终端相连接,娃娃机机组内设有夹物装置,娃娃机机组内且位于夹物装置的下方设有平台,平台的一侧设有出口通道,出口通道的一侧设有红外感应器,平台的下方设有震荡机构。有益效果:通过多人的互动的竞技,增加了娃娃机的趣味性,以及多人竞技的刺激性,大大提高了娃娃机的可玩性,使娃娃机不再只是一种简单的“夹娃娃”和“夹公仔”而能成为

包装袋抓取卸料机构及其抓取卸料方法.pdf
本发明涉及一种包装袋抓取卸料机构及其抓取卸料方法,移动框架的下方连接有剪刀臂,剪刀的底部连接有升降框架,升降框架下方设有C形钩,各C形钩下方设有限位板,限位板上均匀分布有多个限位板钩孔。移动框架上安装有行走减速电机,行走减速电机的输出端安装有行走驱动轴,行走驱动轴的两端分别安装有与X向链条相啮合的X向行走链轮。抓取卸料方法依次包括如下步骤:皮带卷绕筒向下释放升降带,升降框架及限位板下降;当限位板落在包装袋上后,皮带卷绕筒停止;各C形钩伸出,插入包装袋中;升降带卷绕将抓取的各包装袋升起;皮带卷绕筒先减速后停