
一种基于目标三状态建模的遮挡目标多帧跟踪方法.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于目标三状态建模的遮挡目标多帧跟踪方法.pdf
本发明一种基于目标三状态建模的遮挡目标多帧跟踪方法,属于目标自动跟踪领域,在高目标漏检、高杂波密度的复杂环境下,针对遮挡目标的鲁棒自动跟踪问题,对现有的综合航迹分裂方法进行改进,通过对目标存在事件进行三状态描述,考虑目标存在但无法被观测到的可能性,对目标存在三状态的时域演变规律进行一阶马尔科夫链建模,通过保存每一时刻每条航迹每个关联假设的历史信息,利用后续观测信息来加强前期关联假设的可信度,以提升对遮挡目标跟踪性能的鲁棒性,具体体现在航迹维持、虚假航迹剔除等方面。

基于遮挡物建模的有遮挡情况下的目标跟踪方法.pdf
本发明为一种基于遮挡物建模的有遮挡情况下的目标跟踪方法,步骤包括:对于每一帧输入图像,根据在初始帧建立的目标模型,利用均值漂移算法求目标的状态;检测遮挡是否发生,当检测到目标被其他物体遮挡时,对遮挡物建模,以确定目标可能重现的区域,当没有检测到目标被遮挡,则输出目标的状态;通过寻找遮挡物的轮廓对遮挡物进行建模,遮挡物的轮廓通过改进的主动轮廓方法来实现;在目标可能重现的区域搜索目标,并对目标进行确认,若是目标,则输出目标的状态,若不是目标,则在目标可能重现的区域继续搜索目标,在对目标的搜索过程中遮挡物的轮廓

一种基于遮挡情况下的目标跟踪方法.pdf
一种基于遮挡情况下的目标跟踪方法,包括:1.对输入的图像进行前景提取,获得前景二值图像,对于复杂的室外场景应用,采用混合高斯背景模型;2.利用轮廓信息提取目标,获得目标的大小、中心位置及方框信息,同时确定目标的个数;3.分析目标信息判断目标方框是否与轨迹最近位置对应的目标方框相交;4.如果不相交,则进行交叉相关性匹配,若匹配不成功,则进行下一个目标或者下一条轨迹搜索;5.如果相交,则判断目标的大小是否满足匹配条件,如果满足,则判断目标的位置是否满足匹配条件,如果也满足,则匹配成功,反之进行下一步搜索;6.
一种基于多帧输入与轨迹平滑的多目标跟踪方法和装置.pdf
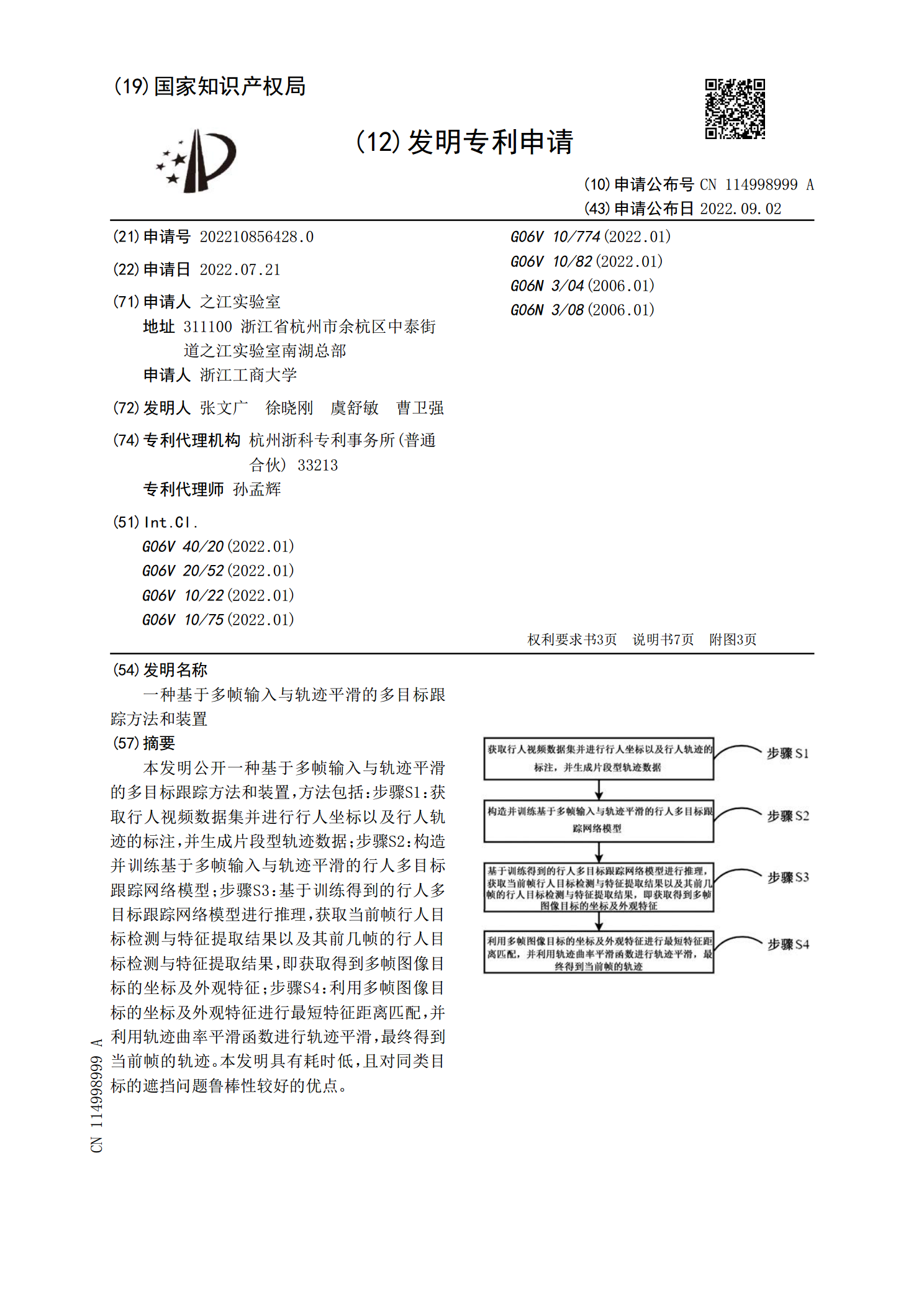
本发明公开一种基于多帧输入与轨迹平滑的多目标跟踪方法和装置,方法包括:步骤S1:获取行人视频数据集并进行行人坐标以及行人轨迹的标注,并生成片段型轨迹数据;步骤S2:构造并训练基于多帧输入与轨迹平滑的行人多目标跟踪网络模型;步骤S3:基于训练得到的行人多目标跟踪网络模型进行推理,获取当前帧行人目标检测与特征提取结果以及其前几帧的行人目标检测与特征提取结果,即获取得到多帧图像目标的坐标及外观特征;步骤S4:利用多帧图像目标的坐标及外观特征进行最短特征距离匹配,并利用轨迹曲率平滑函数进行轨迹平滑,最终得到当前帧

一种抗遮挡目标跟踪方法.pdf
本发明提供一种抗遮挡目标跟踪方法,首先对于输入视频或图像序列,采用目标检测器对视频中的每一帧图像进行检测得到基于检测的候选项;根据输出当前帧的目标检测结果,运用卡尔曼滤波器预测目标在下一帧的位置得到基于跟踪的候选项。根据置信度评分公式计算候选项的置信度,采用非极大值抑制算法得到最终候选项;将相邻帧的候选项输入特征匹配网络,通过级联匹配算法计算目标间的匹配度。将基于检测的候选项通过深度神经网络进行特征提取,进行特征间相似度的匹配;基于跟踪的候选项进行IOU重合度匹配。根据相邻帧的目标匹配结果确定目标在当前帧